 电子发烧友App
电子发烧友App


摘 要:本文主要介绍台达VL系列变频器在电梯行业中的应用,详细描述了电梯的机械结构、电气控制系统架构和控制原理以及苏州某电梯厂的电梯控制系统调试过程。工程实践证明,台达VL系列变频器应用在电梯控制上能体现出良好的调速性能和稳定性,值得行业推广。
关键词:VL系列变频器;电梯;电气控制系统;编码器;电动机参数
中图分类号: 文献标识码:B
1 引言
电梯是一种机电结合,为高层建筑提供运输服务的复杂的特种设备。随着城市建设的不断发展,高层建筑不断增多,电梯在国民经济和生活中需求不断增长,人们对电梯的要求也越来越高。如运行平稳性、外观完美性、安全性及环保节能性。
目前电梯业界的主要制造厂商有美国奥的斯、瑞士迅达、芬兰通力、德国蒂森、日本三菱、日立、东芝、富士达等13家大型外商投资公司,占据中国内地市场高达到76% 以上。比重如图1所示。

图1 中国内地市场电梯品牌所占比重图
电梯驱动最显著特点是位能拖动负载,位能拖动负载要求电机四象限运行。电梯频繁启动类负载,要求满足重负载条件启动、换速、换向平稳无冲击(舒适感好),平层精度高(定位准确)和低速力矩大。换言之,电梯驱动对变频器工程运行能力有全面高等级技术要求。电梯可以说是要求最高变频器应用领域。基于变频器进行电梯系统的控制和驱动是业界共同研究和面对的重要课题。
台达机电至今已经能为客户提供PLC控制器、温度控制器、计数器、人机界面、变频驱动器、伺服驱动器、数控系统等一系列产品,可以向客户提供完善可靠的机电一体化解决方案。本文基于台达VL系列变频器在电梯行业应用,实现了电梯的良好驱动控制,效果良好,得到业界同行认可。
2 电梯的分类
2.1按速度我国习惯上分为以下4类:
(1)低速梯——速度低于1.009m/s速度的电梯;
(2)中速梯——速度在1.00~2.00m/s的电梯;
(3)高速梯——速度大于2.00m/s的电梯;
(4)超高速——速度超过5.00m/s的电梯。
2.2 按电机分类可分为:异步电梯(感应电机)及同步电梯(永磁同步电机)
(1)异步电机(感应电机)的工作原理是通过定子的旋转磁场在转子中产生感应电流,产生电磁转矩,转子中并不直接产生磁场。因此,转子的转速一定是小于同步转速(旋转磁场的转速)的,故称异步电机,也称感应电机(induction motor)。
其优缺点如下:
优点:结构简单,制造方便,价格便宜,运行方便。
缺点:功率因素滞后,轻载功率因数低,调速性能稍差。
(2)同步电机转子本身产生固定方向的磁场(用永磁铁或直流电流产生),定子旋转磁场“拖着”转子磁场(转子)转动,因此转子的转速一定等于同步转速, 故称同步电机。
其优缺点如下:
优点:同步电动机结构简单、体积小、重量轻、损耗小、效率高;与异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好。能够实现高精度、高动态性能、大范围的调速或定位控制。
缺点:成本高。
3 VL系列变频器的功能特点
VL系列变频器如图2所示。
图2 VL系列变频器
3.1特色一:
具有高效能磁束向量控制(FOC);
使用于感应马达及永磁同步马达;
IM/PM马达参数自动侦测;
磁极位置检测及自学习功能;
薄型模组化设计,易安装易维护;
内建制动刹车单元(至22kW);
无需称重补偿;
3.2特色二:
自动修正启动转矩及手动微调功能;
内建电梯机械刹车输出接点;
内建电梯启动/停止程序;
采用RS-485通讯界面,标准的MODBUS通讯协议;
可选购买操作面板;
可选购多种型式PG回授卡;
3.3特色三:
多种控制模式选择,有V/F、V/F+PG、SVC、FOC+PG、TQR+PG及FOC+PG(PM)控制模式;
启动转矩0Hz时可达150%以上(+PG);
速度控制范围 1:1000(+PG);
速度控制精度 ±0.02%(+PG);
过载保护:定/转矩150%60秒,200%额定电流3秒;
频率设定分辨率:12bits。
4 电梯设备及控制系统的构成
4.1 设备简介
该电梯楼层数为17层,系统的现场配置如下:
机种:VFD-185VL43A(34A)
软件版本:1.06
编码器:海德汉1387
曳引机的规格如表1所示。
表1 永磁同步无齿轮曳引机规格表

4.2 电气控制系统架构
电梯的电气控制系统架构如图3所示。

图3 电梯的电气控制系统架构
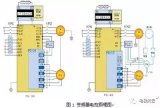
4.3 系统接线
现场主机箱接线图如图4所示。
图4 主机箱现场接线图
系统的接线图如图5所示。

图5 系统接线图
配线说明如表2所示。
表2 配线说明表

编码器接线图如图6所示。

图6 编码器接线图
运转时外部输入端子状态如表3所示。(其中1表示导通闭合;0表示开路)

表3 运转时外部输入端子状态表
5 系统调试
注意:在拆除原有变频器前,请先把电梯停到中间楼层。
VL变频器调机步骤如下:
5.1 步骤一:基本设定与马达参数
(1)确认机种代码与铭牌相符
(2)控制模式00-09选择8,FOC PM控制模式
(3)请设定基本参数
01-00=31.83HZ 最大输出频率
01-01=31.83HZ第一输出频率设定1(基底频率/电机额定频率)
01-02=380V第一输出电压设定1(基底电压/电机额定电压)
(4)请选择参数08群设定马达参数
08-01=30A电机满载电流(额定电流)
08-02=13.3kw电机额定功率
08-03=191r/min电机额定转速
08-04=20电机极数
(5)请选择参数10群设定编码器参数
10-00=3 编码器种类
10-01=2048 编码器每转产生的脉波数
10-02=1 编码器输入型式
5.2 步骤二:马达参数自动量测
(1)按PU键此时PU灯亮起
(2)进入参数08-00设定为2,按RUN执行马达参数自动量测。(请注意,多功能输入端子MI8 的出厂设定为”40 驱动器致能”。在未与上位机讯号配合前,请于按Run运转前将此端子出厂设定改为2-08=“0“。此时,方可执行运转。待正式试运转时,若需”驱动器致能”输入功能,请再将MI8设定为40。)
此自动量测不需释放煞车。但若于驱动器与马达之间有加装电磁阀时,需将此电磁阀导通。
自动量测过程中操作面板会显示Auto tuning警告,当警告讯息消失后,表示参数已经量测结束并已将结果存入08-05与08-07,其中08-05为定子电阻,08-07为定子电感。
5.3 步骤三:编码器原点自动侦测
进入参数08-00设定为1,按RUN执行编码器原点自动侦测
请注意,执行此项测试前确认电磁阀与机械煞车已松开。
在条件允许下请在马达空载下执行此项学习,以获得最精准结果。
若条件不允许,车厢需摆平衡负载后再执行此项测试。
如果这些条件都不允许,请将参数08-00=3,按RUN运行,电机可以在满载的情况下自学习编码器偏移角,但此时电机要运行3圈。省去吊较箱、摆平衡载的复杂工作具体步骤:
(1)00-14=3
(2)输入端子:多段速一MI1,多段速二MI2,多段速三MI3,使能MI8
输出:电磁阀输出(RA)、机械抱闸输出(MRA)、故障报警(MO1)、设定频率到达(MO2)
(3)确认04-00----04-15为零
(4)11-00 = 81Hex(设定为自动频宽和零速伺服功能)先以零速位置控制取代秤重补偿功能调整电梯起动时的转矩输出(可调整10-19得到较好的零速位置转矩输出)。另外和2-29、2-31的配合有关联,此虚拟的时序要和上位机的时序一致,如果每层楼有差异。可调节10-22的宽度,要正好落在机械抱匝打开瞬间,但此时间不能过长。
(5)设定08-00=3,利用上位时执行检修向上进行自学习(注意有可能因外部原因引起飞车)
自动量测过程中操作面板会显示Auto tuning-- Fault Code 25警告,当警告讯息消失后表示量测结束,请立即释放掉外部检修按钮,否则可能有飞车危险。并已将结果存入08-09 (建议执行至少3次并做比较,若3次的值皆接近,则便可采用第3次的Tuning值。若每次结果相差3度以上,请停止运作并与我们联络) 。
请注意,执行此学习时,马达运作方向为FWD,若方向运作与客户定义之上下行方向相反,请变更马达配线,如UVW变更为UWV,变更后再次学习。
当操作器显示”Auto Tuning Err”,表示侦测失败,请检查PG配线是否连接妥当。
当显示”PG Fbk Error”,请变更设定10-02,若原先设定为A相领先B相,请变更成B相领先A相,反之亦然。
请依实际现场数据设定参数11-01(电梯速度)、11-02(转盘直径)、11-04(悬挂比)等。
7-00=700,制动电压准位
5.4 步骤四:运转速度曲线设定
确认总共有几段速(高速、中速、低速、爬行、检修、楼层自学习)
多段速设定 04-00 ~ 04-15
确认各段速之设定与多功能输入指令对应之端子的动作时序(MI1、MI2、MI3)
加减速时间设定 01-12 ~ 01-19(建议在试运转时将减速时间设为较小值,待所有时序确定后再做舒适感调试)
S 曲线 01-24 ~ 01-30(建议在试运转时将S曲线时间设为0,待所有时序确定后再做舒适感调试)
5.5 步骤五:试运转
以检修速度试运行,观察电机运转是否运作正常。同时亦观察驱动器多功能输出入端子动作如煞车释放,电磁阀导通等是否与上位机的时序相符。
第一次运转请先行将原本的速度设定先行降低。待观察几次运转后再将转速设定为正常速度。
5.6 步骤六:舒适感调试
将11-05的惯量值微调整并观察整体电梯运转状况直到驱动器的转矩输出符合系统需要;微调参数11-06、11-07、11-08等速度频宽以达到较好之速度跟随;
调整参数01-29( S减速到达时间设定S5致能切换频率)、01-30( S减速到达时间设定S5)以得到较好之停车舒适感及准确的平层位置。
平层不好可以通过修改爬行速度来快速解决问题。
6 控制参数及运行效果分析
6.1控制参数
(1)速度控制基本曲线图如图7所示。

图7 速度控制基本曲线图
(2)基本参数设定如表4所示。
表4 基本参数设定



6.2 运行效果
(1)上行图如图8所示。

图8 系统运行上行图
(2)下行图如图9所示。

图9 系统运行下行图
调试成功后,电梯舒适度的各项指标与某欧洲品牌产品的对比表如表5所示。

表5 电梯舒适度的各项指标与某欧洲品牌产品的对比表
从表中可见,调试后的系统运行舒适度各项指标已经超过该欧洲名牌产品。
7 结语
该电梯企业集产品设计开发、制造、销售、安装、维修、保养和装潢于一体,产品涵盖乘客电梯(4米/秒)、无机房电梯、观光电梯、医用电梯、汽车电梯、自动扶梯、自动人行道、液压电梯、载货电梯等十大系列。
经过调试,成功替代了原来陈旧的设备,解决了经常死机的故障问题,并且提高了乘坐舒适度,各项性能指标均达到客户的要求。台达VL系列变频器在电梯行业中的成功应用,实现了较好的速度调节,保证了可靠性,值得国内同行借鉴。
参考文献
[1] 台达VL系列变频器说明书, 台达内部资料 2006
[2] 变频器应用中的干扰及其抑制 翟章志 中国科技博览2009年 第02期
[3] 变频器在工业中的选择与应用 刘继党等 科技信息 2009年 第23期
作者简介
张 硕 男,中达电通股份有限公司工程师(我国职称序列中没有高级应用工程师这一职称级别),专注于变频器的研发与整合应用,具有电梯行业的丰富应用经验。
何国精 男,中达电通股份有限公司厦门分公司工程师(2007年毕业于江西科技师范学院主修机械电子工程专业。目前在中达电通股份有限公司担任应用工程师,从事自动化控制行业3年。)















 工商网监
工商网监
评论