

















倒立摆是日常生活中许多重心在上、支点在下的控制问题的抽象模型,本身是一种自然不稳定体,它在控制过程中能有效地反映控制中许多抽象而关键的问题,如系统的非线性、可控性、鲁棒性等问题。对倒立摆系统的控制就是使小车以及摆杆尽快地达到预期的平衡位置,而且还要使它们不会有太强的振荡幅度、速度以及角速度,当倒立摆系统达到期望位置后,系统能克服一定范围的扰动而保持平衡。作为一种控制装置,它具有形象直观、结构简单、便于模拟实现多种不同控制方法的特点,作为一个被控对象它是一个高阶次、非线性、多变量、强耦合、不稳定的快速系统,只有采取行之有效的方法才能使它的稳定效果明了,因此对倒立摆的研究也成为控制理论中经久不衰的研究课题。
1 一级倒立摆系统的数学模型
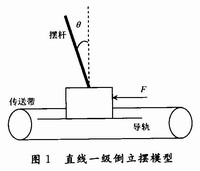
对于倒立摆系统来说,如果忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成沿着光滑导轨运动的小车和通过轴承连接的匀质摆杆组成,如图1所示。其中,小车的质量M=1.32 kg,摆杆质量m=0.07 kg,摆杆质心到转动轴心距离l=0.2 m,摆杆与垂直向下方向的夹角为θ,小车滑动摩擦系数,fc=0.1。
倒立摆控制系统数学模型的建立方法一般有利用牛顿力学的分析方法和分析力学中的拉格朗日方程建模两种。本文采用的是拉格朗日方程建模。
一级倒立摆系统的拉格朗日方程应为:
式中:L是拉格朗日算子;V是系统动能;G是系统势能。
式中:D是系统耗散能;fi为系统在第i个广义坐标上的外力。
一级倒立摆系统的总动能为:

一级倒立摆系统有4个状态变量,分别是
,根据式(7)写出系统状态方程,并在平衡点处进行线性化处理,得到系统的状态空间模型如下:

2 倒立摆性能分析
系统的能控性是控制器设计的前提,所以在设计前对系统进行能控性分析,根据能控性矩阵T0=[B,AB,A2B,A3B],利用Matlab中的rank命令,可以得出rank(T0)=4。由此可知,系统是完全可控的,因此可以对系统进行控制器的设计,使系统稳定。
3 LQR控制器的设计
3.1 LQR控制器原理
线性二次型调节器的控制对象是线性系统,这个线性系统必须是状态空间的形式,即:
,Y=Cx+Du。通过确定最佳控制量U*=R-1BTPX=-KX的矩阵K,使性能指标
的值极小。其中,加权矩阵Q和R是用来平衡状态变量和输入变量的权重;P是Riccati方程的解。这时求解Riccati代数方程:
就可获得P值以及最优反馈增益矩阵K值:
LQR用于单级摆的原理图如图2所示。










 工商网监
工商网监
用户评论
共 0 条评论