

















1 引言
三相异步电机直接起动时会产生很大的危害。本文采用三相反并联晶闸管控制导通电压来实现电机的软启动。但要使电机的定子电压按某一特定规律变化是很困难的,原因是:电机的续流角决定于其功率因数角,而功率因数角又与电机转速相关,在电机起动过程中,电机转速的不断变化,会导致功率因数角的变化。因此,本文提出将模糊控制应用于中压异步电动机软启动器的控制中,有效解决了电流振荡问题,获得较好的控制效果。
2 功率因数角时变引起的电流振荡问题
根据三相异步电动机t型电路进行等效,电机的功率因数角为相电压与相电流的相位差,它等于电机单相阻抗z的阻抗角,  。当电机参数已知时,阻抗z为给定的电机,在给定的频率下其同步转速ns是固定的。
。当电机参数已知时,阻抗z为给定的电机,在给定的频率下其同步转速ns是固定的。
由n=ns(1-s)及上式可得电机的功率因数角θ与电机转速n之间的函数关系θ=f(n),即可得出某4极三相电机函数关系曲线如图1所示。
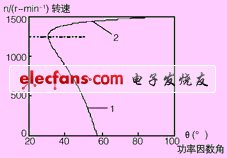
图1 4极三相电机函数关系曲线
从图1可以看到,在电机起动过程中,电机的功率因数角θ变化非常大:电机由静止状态开始,随着电机转速n的上升,θ角逐渐减小,当电机转速上升到额定转速时,θ角达到最小值,如图1中第1 段曲线所示;当电机处于轻载运行状态下时,其转速可以进一步提升,此时,功率因数角θ又随转速n的上升而增大,如图1中第2段曲线所示。
根据晶闸管调压电路的工作原理,额外的不可忽视的影响晶闸管输出电压的因素是电机的续流作用,而电机续流角的变化规律决定于其功率因数角,且该续流角便于实际测量。
考虑晶闸管调压型软起动控制器的一相电路,其工作电压示意图如图2所示。

图2 工作电压示意图
所以: ,α为检测过零后设定的触发角,θ为功率因数角,
,α为检测过零后设定的触发角,θ为功率因数角,  为实际导通角。晶闸管的输出电压有效值应为:
为实际导通角。晶闸管的输出电压有效值应为:
在电机软起动过程中,电机的端口电压是逐渐提高的,其电压大小取决于晶闸管的实际导通角 , 而又取决于α和θ的大小,而由图1 知在启动过程中θ又随着电机的转速不断变化,如果升压过程中α没有及时变化,而θ变小,则会出现实际有效电压下降,此时必然会引起电机转速下降,而功率因数角θ随之变大,则实际导通角又会增大,实际电压增大,转速升高θ又会变小,如此往复就会出现转矩振荡,同时电流表现为电流震荡,电机启动不起来,会出现严重的后果。这也是本文要解决的问题。
, 而又取决于α和θ的大小,而由图1 知在启动过程中θ又随着电机的转速不断变化,如果升压过程中α没有及时变化,而θ变小,则会出现实际有效电压下降,此时必然会引起电机转速下降,而功率因数角θ随之变大,则实际导通角又会增大,实际电压增大,转速升高θ又会变小,如此往复就会出现转矩振荡,同时电流表现为电流震荡,电机启动不起来,会出现严重的后果。这也是本文要解决的问题。
3 系统的构成及原理
目前,国外的软启动器主要时采用串联晶闸管技术,但是,由于晶闸管抗干扰能力不强容易受工作坏境的限制,而且晶闸管老化容易引起参数变化问题,使控制容易出现偏差。而把变压器来隔离高压和低压(如图3),变压器的高压绕组串在异步电动机的定子回路中,而低压绕组与晶闸管相连。低压绕组的晶闸管导通以前,变压器工作在空载状态,变压器的励磁阻抗很大,所以电网电压基本上都降在三相开关变压器上,电动机不能起动。起动时,通过控制系统控制晶闸管的触发角,可以连续改变低压绕组上的电压,进而可以改变高压绕组的电压而达到连续改变电机端电压的目的,这样可以实现电机的软起动。由于变压器工作在开关状态,所以变压器的损耗很小。

图3 采用变压器的软起动器









 工商网监
工商网监
用户评论
共 0 条评论