 L293DIC的特征和规格
L293DIC的特征和规格
学术机器人使用的电机通常工作在5,6,9,12或24伏。根据型号,制造方法,价格等,它们的电流约为100 mA至5A。您可以通过多种方式使用电机。一种方法是将其直接连接到电池,然后以特定方向以最大速度旋转,但实际上,我们需要控制电机(开关,速度控制,方向控制和位置控制)。/p》
因此,我们必须使用控制器(逻辑电路或微控制器或PC或计算机)控制电机。但是,如您所知,微控制器的输出为5V和200mA,无法旋转电机。因此我们需要中间电路将控制器连接到电机,称为驱动器。
L293D是市场上最受欢迎的驱动器之一。有几个原因使L293D成为用户的首选驱动器,例如价格便宜(与其他驱动器相比),形状和尺寸合适,易于控制,无需保护电路和二极管,无需散热片和良好的电阻温度和高速变化。该IC可以设置电压为5V至36V,电流高达600 mA的电机。但是,它可以在100微秒内承受高达1200 mA的电流且不重复。该IC的频率为5 kHz。如果您的电机符合这些规格,请不要犹豫使用L293D。
功能和规格
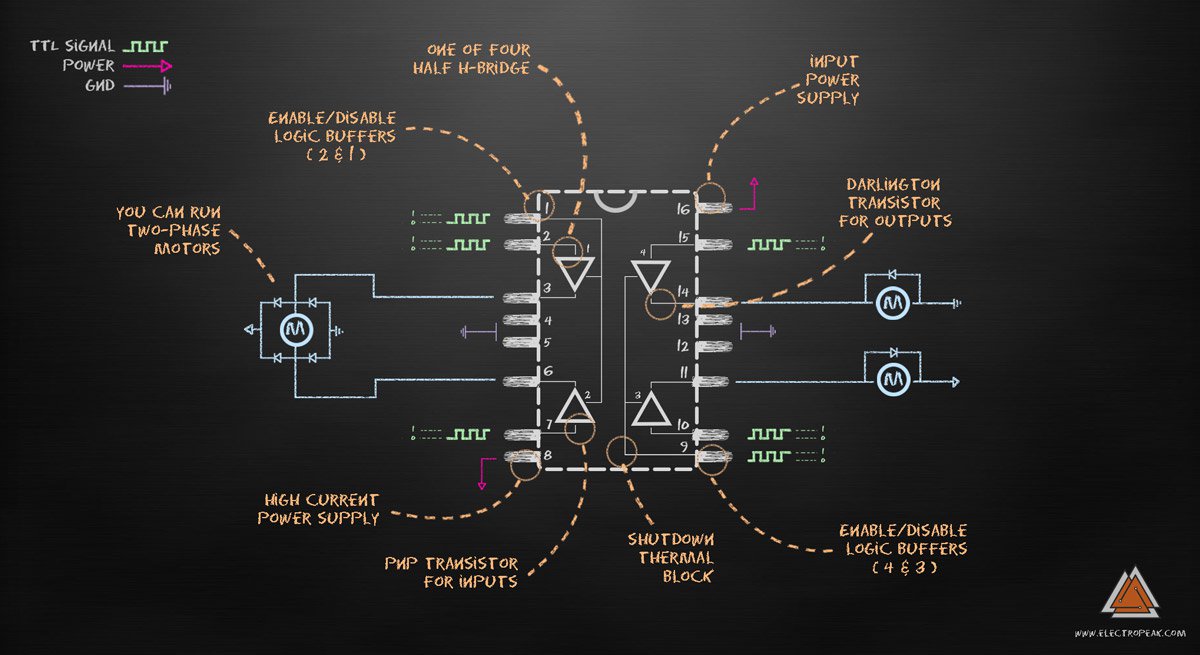
L293和L293D器件是四倍高电流半H驱动器。 L293设计用于在4.5 V至36 V的电压下提供高达1 A的双向驱动电流.L293D设计用于在4.5 V至36 V的电压下提供高达600 mA的双向驱动电流。两种器件均为设计用于驱动感应负载,如继电器,螺线管,直流和双极步进电机,以及正电源应用中的其他高电流/高压负载。
每个输出都是一个完整的图腾柱驱动电路,使用达林顿晶体管吸收器和伪达林顿源。驱动程序成对启用,驱动程序1和2由1,2EN启用,驱动程序3和4由3,4EN启用。 L293和L293D的特点是工作温度范围为0°C至70°C。
其他重要的 L293D功能包括:
宽电源电压范围:4.5 V至36 V
独立的输入逻辑电源
内部ESD保护
高抗噪性输入
输出电流每通道1 A(L293D为600 mA)
峰值输出电流每通道2 A(L293D为1.2 A)
用于感应瞬态抑制的输出钳位二极管(L293D)
整体L293D图
模拟 - L293
H-bridge& Half-H
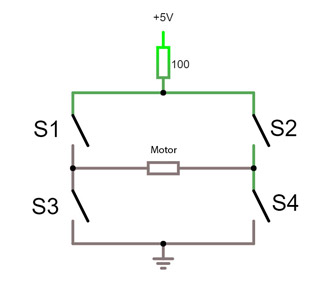
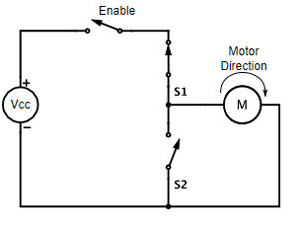
H桥是一种电子电路,可以在相反方向的负载上施加电压。这些电路通常用于机器人和其他应用,以允许直流电机向前或向后运行。
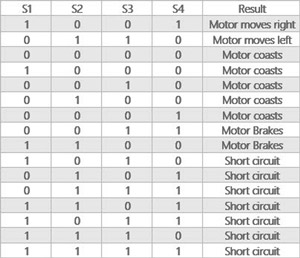
术语H桥是从这种电路的典型图形表示中得出的。 H桥由四个开关(固态或机械)构成。当开关S1和S4(根据第一图)闭合(并且S2和S3断开)时,将在电动机上施加正电压。通过打开S1和S4开关并关闭S2和S3开关,该电压反转,允许电机反向操作。
使用上面的命名法,开关S1和S2不应同时关闭,因为这会导致输入电压源短路。这同样适用于开关S3和S4。这种情况称为直通。
模拟 - H桥
模拟 - H桥 - 指南
但是L293是一个四重半H桥。半个H桥将输出引脚连接到Vcc或接地或断开它。使用一个可以打开或关闭直流电机或应用于制动但不能反转电机。要反转直流电机,您需要两个H桥的一半。
达林顿晶体管
在电子学中,达林顿晶体管(通常称为达林顿对)是一种特殊设计的复合结构,由两个连接在其中的双极晶体管组成。由第一晶体管放大的电流被第二晶体管进一步放大的方式。这种配置提供了比单独采用的每个晶体管高得多的电流增益。
Sidney Darlington于1953年发明
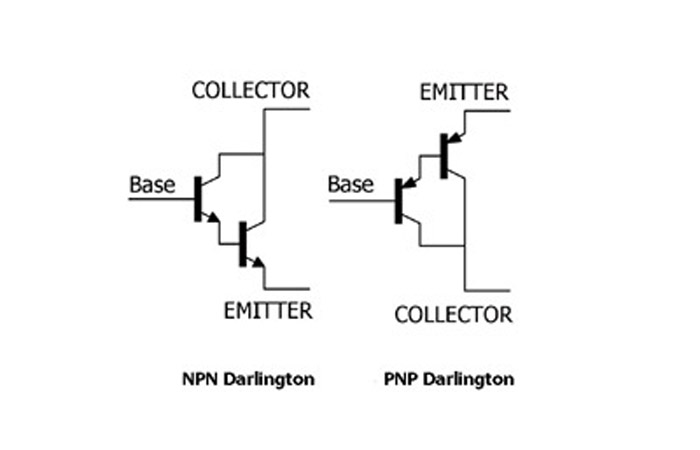
如果我们看到达林顿晶体管的符号我们可以清楚地看到两个晶体管是如何连接的。在下图中,示出了两种类型的达林顿晶体管。左边是NPN Darlington,另一边是PNP Darlington。我们可以看到NPN达林顿由两个NPN晶体管组成,PNP达林顿由两个PNP晶体管组成。第一晶体管的发射极直接连接在另一个晶体管的基极上,两个晶体管的集电极也连接在一起。该配置用于NPN和PNP达林顿晶体管。在这种配置中,该对或达林顿晶体管产生更高的增益和大的放大能力。
模拟 - 达林顿晶体管
L293D Pinout
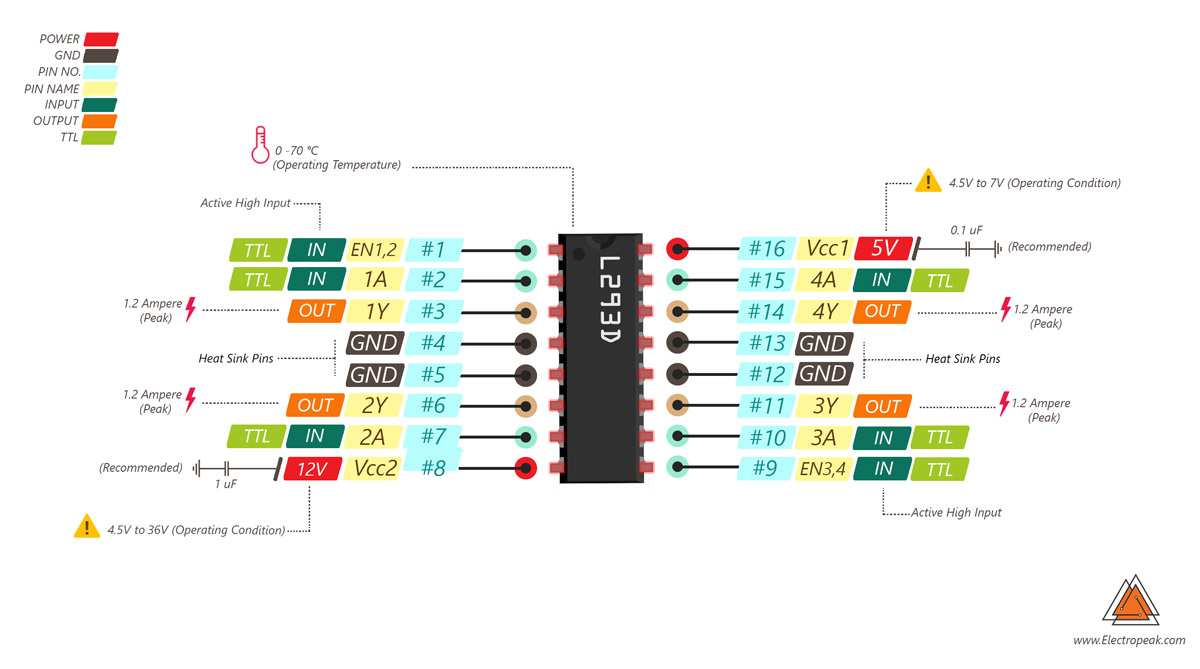
L293或L293D?!
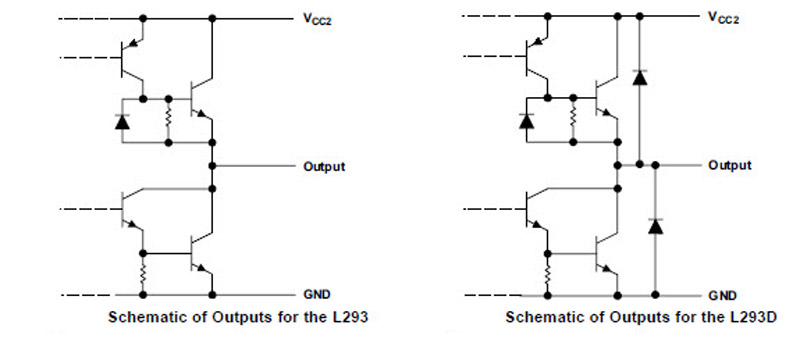
L293和L293D有什么区别?名称中的字母D表示内部安装的二极管,这意味着我们不需要添加任何外部组件。这是主要的区别。如果查看数据表,您可以看到其他一些差异,如输出电流。此外,L293输出中的连续电流为1A,而L293D输出中的持续电流为600 mA。 L293输出中的峰值电流为2安培,L293D输出为1.2 A
-
L293D
+关注
关注
4文章
50浏览量
20200
发布评论请先 登录
相关推荐
ESD0502L DFN1006-3L ESD保护器件规格书
ESD0302L DFN1006-3L ESD保护器件规格书
EE-293:估算ADSP-BF561 Blackfin处理器的功耗






 工商网监
工商网监
评论