 激光雷达的标定_激光雷达的功能
激光雷达的标定_激光雷达的功能
激光雷达的标定
1、旋转
三个角度,旋转角、俯仰角、横摆角
可以涉及到投影,投影是平行投影。
这里倾角会有不同,但是投影的形状是一定的。三角形投影下来,还是三角形。
人为的倾斜雷达,他们测量得到的距离是相对于雷达坐标系的,而并不是相对于车体坐标系的。
坐标系:笛卡尔坐标系

横摆角矫正:xy平面
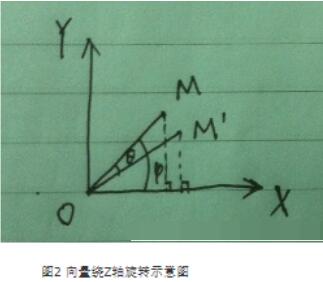
xx=xcosa+ysina
yy=ycosa–xsina
俯仰角矫正:yz平面
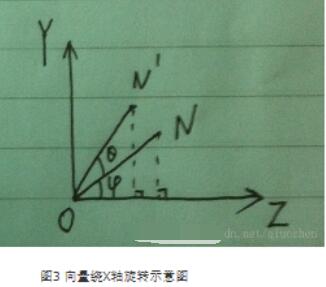
yy=ycos+zsina
zz=zcosa–ysina
旋转角矫正:xz平面
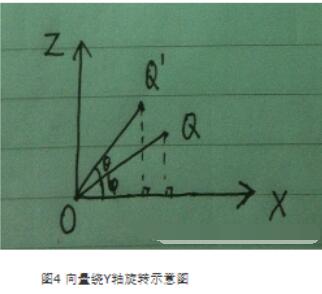
xx=xcosa-zsina
zz=zcosa+xsina
合起来就是一个四维的旋转矩阵。
2、平移
xx=xx+w;
yy=yy+h;
zz=zz+z;
通过以上6个参数:三个角,三个偏移,就可以解决多线激光雷达标定问题。
激光雷达的功能
激光雷达具有高精度电子地图和定位、障碍物识别、可通行空间检测、障碍物轨迹预测等功能。
(1)高精度电子地图和定位利用多线束激光雷达的点云信息与车载组合惯导采集的信息,进行高精度电子地图制作。无人驾驶汽车利用激光点云信息与高精度电子地图匹配,以此实现高精度定位。
(2)障碍物识别利用高精度电子地图限定感兴趣区域(ROI)后,根据障碍物特征和识别算法,进行障碍物检测与识别。
(3)可通行空间检测利用高精度电子地图限定ROI后,可以对ROI内部(比如可行驶道路和交叉口)点云的高度及连续性信息判断点云处是否可通行。
(4)障碍物轨迹预测根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人驾驶汽车规划(避障、换道、超车等)的判断依据。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
968文章
3991浏览量
190086
发布评论请先 登录
相关推荐
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
电子发烧友网报道(文/梁浩斌)一则消息引爆激光雷达行业?上周业界流传的一份会议纪要称,有自动驾驶专家透露,特斯拉已经设计了自己的激光雷达,并正在与大陆集团合作,将自己开发的激光雷达技术集成到汽车系统
激光雷达,明年要降价至200美元
电子发烧友网报道(文/梁浩斌)激光雷达降本的速度,在进入大规模量产之后开始不断加速。从2021年激光雷达刚刚大规模上车,单个激光雷达1000美元;到2023年,激光雷达降至500美

激光雷达会伤害眼睛吗?
随着激光雷达日益普及,人们开始担忧:这种发射激光的设备,对人眼的安全性如何?了解这个问题前,我们首先需要知道激光雷达和它发射的激光,到底是什么。

激光雷达的维护与故障排查技巧
激光雷达(LiDAR,Light Detection and Ranging)是一种利用激光进行距离测量和目标识别的技术。它广泛应用于无人驾驶汽车、地理信息系统(GIS)、环境监测、航空航天等领域
激光雷达技术的基于深度学习的进步
一、激光雷达技术概述 激光雷达技术是一种基于激光的遥感技术,通过发射激光脉冲并接收反射回来的光来测量物体的距离和速度。与传统的雷达技术相比,
激光雷达技术的发展趋势
激光雷达(LiDAR,Light Detection and Ranging)技术是一种通过发射激光脉冲并接收其反射来测量距离和速度的遥感技术。它在多个领域,如测绘、环境监测、自动驾驶汽车和无人机等
光学雷达和激光雷达的区别是什么
光学雷达和激光雷达是两种不同的遥感技术,它们在原理、应用、优缺点等方面都存在一定的差异。以下是对光学雷达和激光雷达的比较: 定义和原理 光学雷达
一文看懂激光雷达
文章大纲 城市 NOA 成竞争高地,政策助力高阶智能驾驶加速落地 成本下探+智驾升级,2030年激光雷达市场规模有望超万亿 ·城市 NOA面临工况复杂问题,激光雷达为“优选

基于FPGA的激光雷达控制板
激光雷达作为一种高精度、高性能的传感技术,广泛应用于自动驾驶、机器人导航、工业自动化、无人机等应用领域。激光雷达控制板可以很好的满足这些领域中对于精准控制和数据处理的需求。基于FPGA的激光雷达

硅基片上激光雷达的测距原理
硅基光电子技术的发展可以将激光雷达系统发射模块和接收模块中分立的有源和无源器件集成在芯片上,使激光雷达体积更小、稳定性更强、成本更低,推动激光雷达在自动驾驶等领域的应用。
发表于 04-08 10:23
•612次阅读

激光雷达的探测技术介绍 机载激光雷达发展历程
机载激光雷达是指安装在飞行器(如飞机、直升机、无人机等)上的激光雷达系统,用于从空中对地面或其他目标进行测量、成像和监测。

华为详细解读激光雷达
来源:华为智能汽车解决方案,谢谢 编辑:感知芯视界 Link 激光雷达(LiDAR)作为智能驾驶系统的核心传感器,其三维环境重建能力为车辆提供了丰富而精确的环境信息,主动发光,不受黑夜光照条件
亮道智能:发布全新一代激光雷达,未来主攻固态激光雷达低价市场
亮道智能官方透露该公司已为众多行业客户提供全面的激光雷达感知解决方案,包括车规级激光雷达硬件及其感知功能开发、测试验证及数据服务。
激光雷达LIDAR基本工作原理
一、激光雷达LiDAR工作原理激光雷达LiDAR的全称为LightDetectionandRanging激光探测和测距,又称光学雷达。激光雷达

华为激光雷达参数怎么设置
华为激光雷达是一种常用的传感器技术,可用于距离测量和感应。它的参数设置对于确保其性能和功能至关重要。在本文中,我们将详细介绍华为激光雷达的参数设置以及其影响和应用。 首先,我们需要了解激光雷达





 工商网监
工商网监
评论