 KUKA机器人PN网络设置的限制
KUKA机器人PN网络设置的限制
KUKA线路接口(KLI)
1. 基于以太网的客户接口X66 没有内置开关
2. 基于以太网的客户接口X67.1、X67.2、X67.3 没有内置开关
3. 将设备与上级机构耦联 (客户网络,服务器)
4. 基于以太网的现场总线 (PROFINET、PROFIsafe、Ether Net/IP、CIP Safety)
5. 标准以太网 (例如:用于存档和数据交换)
6. 可直接通过SmartPad 的 HMI 进行网络配置。
7. 现场总线的配置将通过WorkVisual 完成
KLI是机器人控制器的以太网接口,用于外部通信。 它是一个物理接口,可以包含多个虚拟接口。
为了使外部PC能够通过网络连接到机器人控制器,必须对KLI进行配置。例如,这是能够通过网络将Work Visual项目传输到机器人控制器的前提条件。
机器人控制器默认将以下地址范围用于内部目的。因此,用户不得分配该范围内的IP地址。
默认设,以地址范围仅由机人制统针对用途使用。 因此,在这范围的IP 地址不许由用户进行分配。
• 192.168.0.0 … 192.168.0.255
• 172.16.0.0 … 172.16.255.255
• 172.17.0.0 … 172.17.255.255
库卡服务接口(KSI - KUKA Service Interface)
由于以上接口属于机器人内部借口因此大家在组态PLC进行分配时一定要注意!
-
机器人
+关注
关注
210文章
28063浏览量
205755 -
以太网
+关注
关注
40文章
5332浏览量
170694 -
KUKA
+关注
关注
3文章
217浏览量
16469
原文标题:KUKA机器人PN网络设置的限制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
焊接机器人拖拽轨迹怎么设置

焊接机器人示教模式怎么设置

机器人神经网络系统的特点包括
机器人神经网络控制原理是什么
Al大模型机器人
ABB机器人与西门子PLC的Profinet通讯设置
工业机器人仿真软件有哪些
abb机器人home点设置方法
abb机器人怎么设置原点位置信号
abb机器人的io通信和信号设置过程

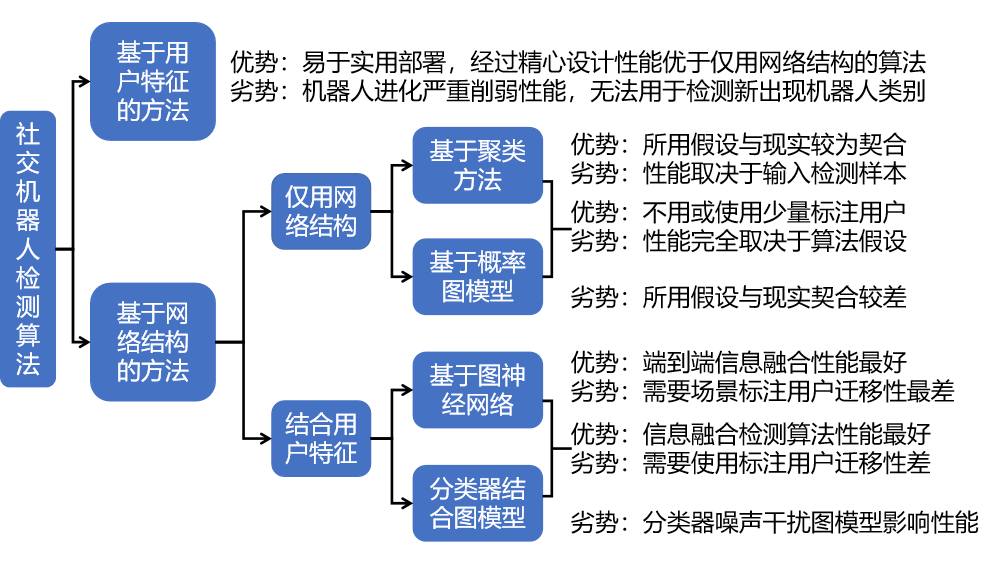
网络社交机器人检测的关键技术






 工商网监
工商网监
评论