 KUKA机器人KLI网络分析-KLIconfig.XML
KUKA机器人KLI网络分析-KLIconfig.XML
库卡线路接口 (KUKA Line Interface,KLI)
KLI 是用于耦联主控层面的接口, 它将外置输入 / 输出端与 IT 连接装置组合成一体, 并且可与一个工业以太网转换器及 / 或一个客户网络以太网转换器相连接。
KLI 始终与 VxWorks 侧进行通讯。与 Windows 只可通过选定的端口才能连接,具体端口已在 KSS 8.x 出厂时预设完毕。这种连接可通过存档功能、文件共享功能、远程桌面协议或WorkVisual 来建立。
KLIconfig.XML 存储文件存储的内容
KLI :KUKA Line Interface (库卡线路接口).
SM:共享存储的驱动程序,VxWork 和 Windows 之间的虚拟网络接口
vnet0:VxWorks 逻辑虚拟接口至 Windows 层面
virtual 5(虚拟接口):VLAN 5 通过 KLI 接口
KLI 的运作方法有两种:
用一个静态 IP 地址
用一个动态 IP 地址
注意:
如已将虚拟网络 virtual5 设定为 DHCP,则无法进行工业以太网通讯。PROFINET 通讯 仅可通过 virtual5 实现。
KUKA的系统WINDOWSTCP/IP地址192.168.0.1 和VxWork的TCP/IP地址192.168.0.2
KLIconfig.xml 程序文件:
NAT:网络地址转换
虚拟网络设备
Profinet地址:10.200.27.150
虚拟网络结束
网络设置程序结束
规则:
WINDOWS将数据发送到内部端口ICMP/TCP,ICMP:Internet控制报文协议
map [GlobalNatInterface] [host:WINDOWS] ->0/32 portmap tcp/udp 18000:18999
map [GlobalNatInterface] [host:WINDOWS] ->0/32 icmpidmap icmp 19000:19999
WINDOWS将数据接收从内部TCP端口
rdr [GlobalNatInterface] [addr] port 3389 ->[host:WINDOWS] port 3389 tcp proxy RemoteIP
NAT:
rdr [GlobalNatInterface] [addr] port 139 ->[host:WINDOWS] port 139 tcp
rdr [GlobalNatInterface] [addr] port 445 ->[host:WINDOWS] port 445 tcp/udp
rdr [GlobalNatInterface] [addr] port 49001 ->[host:WINDOWS] port 49001 tcp
rdr [GlobalNatInterface] [addr] port 49002 ->[host:WINDOWS] port 49002 tcp
rdr [GlobalNatInterface] [addr] port 49003 ->[host:WINDOWS] port 49003 tcp
rdr [GlobalNatInterface] [addr] port 49004 ->[host:WINDOWS] port 49004 tcp
rdr [GlobalNatInterface] [addr] port 49006 ->[host:WINDOWS] port 49006 tcp
rdr [GlobalNatInterface] [addr] port 49010 ->[host:WINDOWS] port 49010 tcp
1.此配置页包含了所有 NAT 规则,用于在 VxWork 和 Windows 7 之间进行数据包传输。
2.这些均可根据客户需要进行调整。
3.所有的 49xxx 端口均用于与 WorkVisual 通讯。如果删除了一个端口,则相应的在线功能 (示波器)也不再可用。
程序结束
扩展机器人整体系统分析图:
PLC 功能,用于通过 PROFINET 现场总线输入 / 输出端
F-PLC 功能,用于通过 PROFIsafe 的安全输入 / 输出端(例如紧急停机)。
KCB
KSB
控制系统与显示器通过 RDP (RDP=R emote D esktop P rotocol,远程桌面协议)而衔接。
RDP - 远程桌面协议
利用 RDP (远程桌面协议),可从某一工位远程访问一台已网络连接的电脑。屏幕内容将通过一个渐隐窗口显示到该工位里,操作人员就好像直接坐在该电脑面前一样。可利用例如鼠标和键盘等外围设备执行全套操作。如今有很多的免费的 RDP 程序可利用一个 Wizard 来简便操作。为可通过互联网建立一个安全的连接,应采用 RC4 加密算法。
微软的操作系统 Windows XP 里已备有一个远程桌面机制。
由于 KLI 在 VX-Works 里接收管理,所以 Microsoft RDP 不能凭借 KLI 在 KR C4 里使用。
Microsoft RDP 只能通过现场的控制柜 (CCU ) 服务端口 X43 而被使用。
VXWORK 系统的作用:
VxWorks 是一个具有微内核、可裁剪的高性能强实时操作系统, 在实时操作系统市场上处于领先地位。VxWorks 是由wRS(wind River Systems , Inc.)公司开发的一套具有微内核、高性能、可伸缩的实时操作系统, 支持广泛的网络通信协议, wRS 公司还提供了优秀的实时操作系统开发工具Tornado。Tornado 能够支持Windows 、Unix 等流行的工作平台和PowerPC、X86 、ARM 等几乎所有的目标处理器, 所提供的工具可用于所有目标机。除了基本的功能和开发工具外, Tornado还具有先进的系列网络产品, 极大地扩展了Tornado的网络特性, 并增强了嵌人式微处理器的网络特性。
使用TCP 进行网络通信时每个连接包括一个服务器和客户。通常情况下, 为了使用方便, 把下位机( VxWorks 端) 做为服务器, 把上位机( Windows 端) 做为客户机。
责任编辑:lq
-
转换器
+关注
关注
27文章
8889浏览量
150260 -
以太网
+关注
关注
40文章
5553浏览量
174318 -
驱动程序
+关注
关注
19文章
856浏览量
48721
原文标题:KUKA机器人KLI网络分析-KLIconfig.XML
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
库卡KUKA机器人常见故障维修
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
Al大模型机器人
工业机器人仿真软件有哪些

矢量网络分析仪的工作原理 矢量网络分析仪的扫描速度
网络分析仪工作原理 网络分析仪和频谱分析仪的区别
矢量网络分析仪和射频网络分析仪有什么区别

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
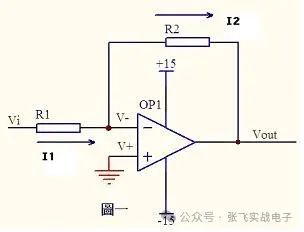
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
ATA-2022B高压放大器在螺栓松动检测中的应用
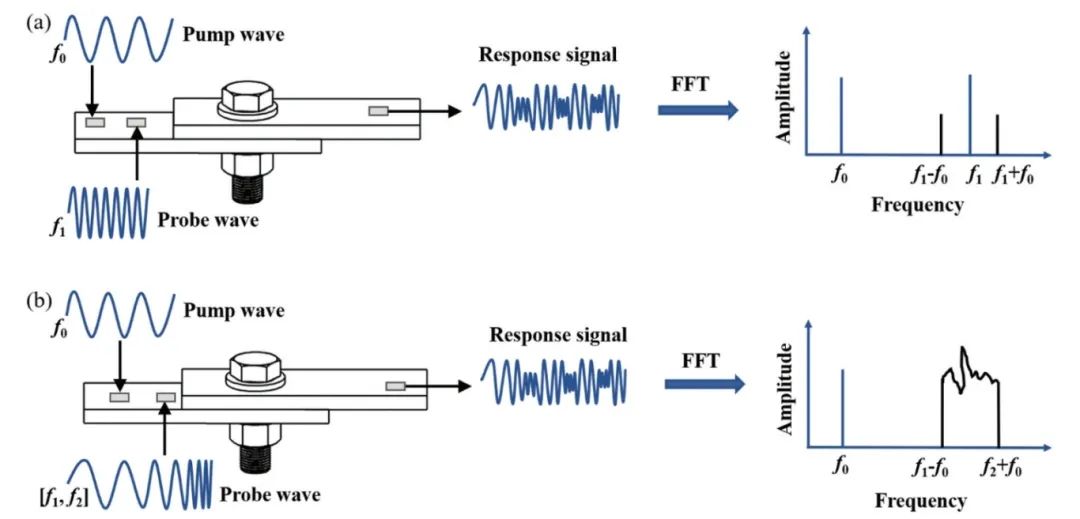
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
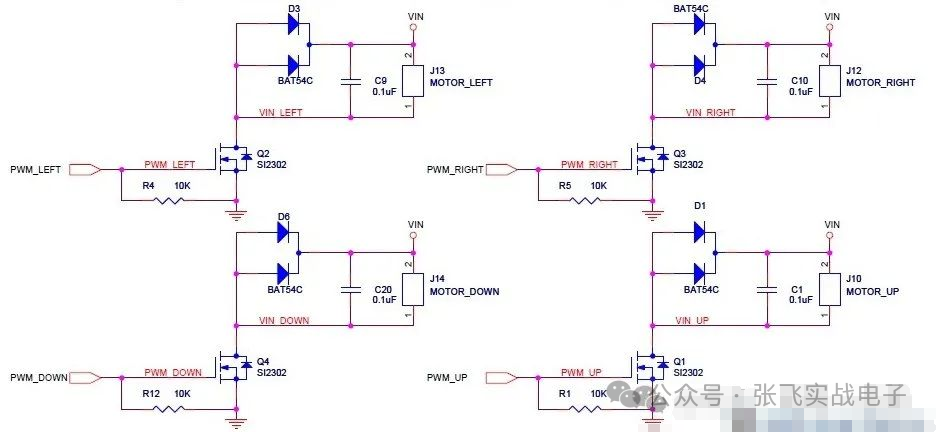
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
硬件原理图学习笔记
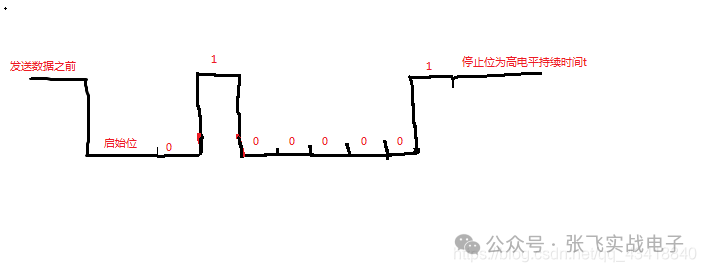
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。

干簧继电器在RF信号衰减中的应用与优势
在电子测试领域,RF(射频)评估是不可或缺的一部分。无论是研发阶段的性能测试,还是生产环节的质量检测,RF测试设备都扮演着关键角色。然而,要实现精准的RF评估,测试设备需要一种特殊的电路——衰减电路。这些电路的作用是调整RF信号的强度,以便测试设备能够准确地评估RF组件和RF电路的各个方面。衰减器的挑战衰减器的核心功能是校准RF信号的强度。为了实现这一点,衰

ElfBoard嵌入式教育科普|ADC接口全面解析
当代信息技术体系中,嵌入式系统接口作为数据交互的核心基础设施,构成了设备互联的神经中枢。基于标准化通信协议与接口规范的技术架构,实现了异构设备间的高效数据交换与智能化协同作业。本文选取模数转换接口ADC作为技术解析切入点,通过系统阐释其工作机理、性能特征及重要参数,为嵌入式学习者爱好者构建全维度接口技术认知框架。
深入理解C语言:C语言循环控制
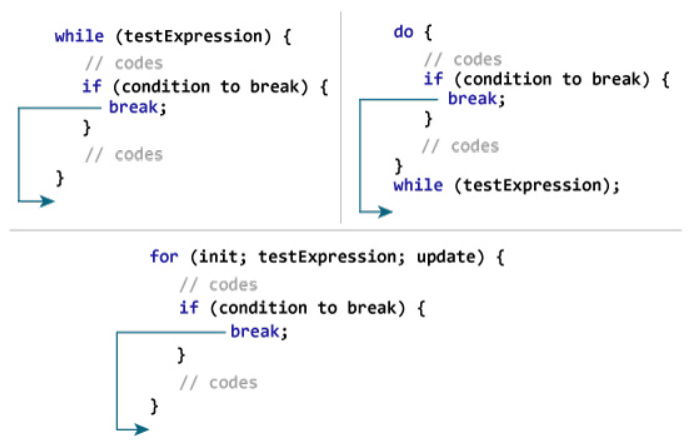
在C语言编程中,循环结构是至关重要的,它可以让程序重复执行特定的代码块,从而提高编程效率。然而,为了避免程序进入无限循环,C语言提供了多种循环控制语句,如break、continue和goto,用于改变程序的执行流程,使代码更加灵活和可控。本文将详细介绍这些语句的作用及其应用场景,并通过示例代码进行说明。Part.1break语句C语言中break语句有两种

第 21 届(顺德)家电电源与智能控制技术研讨会圆满落幕--其利天下斩获颇丰
2025年4月25日,其利天下应大比特之邀出席第21届(顺德)家电电源与智能控制技术研讨会,已圆满落幕。一、演讲回顾我司研发总监冯建武先生在研讨会上发表了主题为《重新定义风扇驱动:一套算法兼容百种电机的有效磁链观测器方案》的演讲,介绍了我司研发自适应技术算法(简称),该方案搭载有效磁链观测器,适配百种电机类型,结合FOC算法可实现免调参稳定启动、低速静音控制

来自资深工程师对ELF 2开发板的产品测评
来自资深工程师对ELF 2开发板的使用测评





 工商网监
工商网监
评论