 采用dsPIC33F单片机和压电陶瓷实现跟踪系统系统的设计
采用dsPIC33F单片机和压电陶瓷实现跟踪系统系统的设计
作者: 陈修涛;侯再红;谭逢富
在试验中,希望接收来自一公里的光斑在成像系统的中心,而由于大气湍流的影响,光斑在成像系统中心附近抖动。目标跟踪就是要通过改变倾斜镜的角度使光斑始终在成像系统的中心。为此,使用位敏传感器采集光斑的位置,微处理器处理数据,得到光斑的的偏移量,最后通过驱动压电陶瓷晶体改变倾斜镜角度。
激光在大气传输时,由于与大气湍流的相互作用,导致光波振幅和相位的起伏。其抖动频率主要是低频成分,压电陶瓷晶体的响应频率在1000Hz 以上,能满足消除大气湍流带来的光斑抖动的影响。在光学跟踪系统中,传统的用于目标跟踪器件为CCD。由于CCD 采集的数据量很大,对后面的数据处理单元的要求很高,并且处理大量的数据增加了处理的复杂性和处理时间。本跟踪系统采用PSD 位敏传感器采集光斑位置信息,输出只有四路信号,只需要五次加法运算、一次减法运算和一次除法运算,运算量大大减少。并且本系统的微处理器采样dsPIC33F系列单片机,它有40M 的指令周期。其内部加减运算为单指令周期,除法只需要19 个指令周期,大大提高了计算速度。
1.校正系统的组成与原理
校正系统总体框图如图1 所示,来自一公里之外的光束,经激光雷达系统接收,通过倾斜镜反射,光束经分光镜分光,一部分进入成像系统,一部分进入PSD 位敏传感器。由位敏传感器采集光斑位置,形成四路电流信号,经电流电压转换放大之后,由单片机进行A/D 转换并计算出光斑的偏移量,并根据光斑的偏移量计算出驱动压电陶瓷所需要的电压。最后将驱动电压值进行D/A 转换,并通过高压驱动器驱动PZT(压电陶瓷晶体)改变倾斜镜的角度,从而使光斑始终在成像系统的中心。
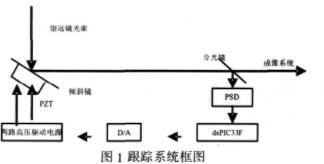
图1 跟踪系统框图
2.总体系统设计
2.1位敏传感器系
位敏传感器是由Si 光电二极管组成,输出信号为电流信号。电流大小与光斑位置和光强强弱有关。其初级电路必须是电流电压转换电路。四路输出信号与光斑位置的关系为:
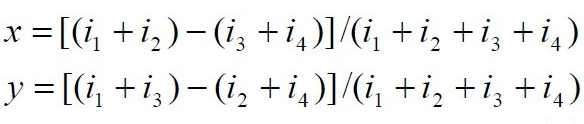
其中i1, i2 , i3, i4 为四路输出信号。上式求x, y 时用到除法运算,消除了光强变化对位置的影响,从而获得与光强无关的位置信号。
2.2单片机控制系统
本系统采用dsPIC33F 系列单片机实现12 位的高速A/D 转换、PID 控制、与D/A 转换器的通信及与计算机的通信。
系列单片机的A/D 部分采用逐次比较式A/D 转换,最多有32 路转换通道,可实现自动通道选择模式采样,拥有16个结果缓冲器。在本系统中我们用125K 的采样速率进行四路模拟信号采样,当16 个结果缓冲器都满之后,产生一次中断,并对每路信号取四次的平均值。逐路采样延长了每一路信号的采样时间,并采取四次采样取平均值的方法,一方面可以减小采样误差,另一方面,可以起到滤波的作用。
目标精跟踪系统需要实现快速反应,这要求我们的算法必须实现快速收敛。我们采用PID(比例-积分-微分)增量算法,可以实现系统的快速收敛。其中P 项为比例项,当误差大的时候,P 的系数也大,可以实现快速调整;当误差小的时候,P 的系数也小,可以实现小幅度的调整。随着时间的消失,P 项有利于减小系统的总误差。但总有一个静态误差。I 项为积分项,对误差进行积分,可以实现误差的精度调整,使静态误差积累到一定的值乘以I 项的增益因子之后输出,消除静态误差的影响。D 项为微分项,用来实现快速调整,,它对误差信号的变化率进行响应。
增量算法推导如下:
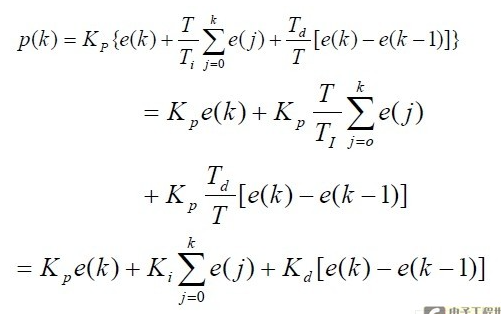
其增量式为:
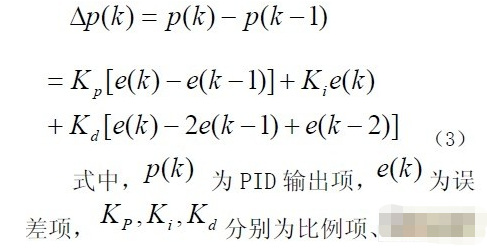
微分项的系数。由(2)式可以看出,由于PID 输出与历史状态有关,计算工作量很大,需要对偏差信号进行累加。而采用增量式PID 算法,既(2)的算法,输出量为误差的增量,可以减小计算量。
转化采用的是SPI 通信方式,D/A转换器选用的时TLV5638,它是双路输出的D/A 转换器,其输出的最高电压是参考电压的2 倍,其饱和电压为电源电压VDD -0.4v ,也是说参考电压不应该大于V DD -0.4v ,另外,D/A 转换必须在片选信号CS 的下降沿。而对运放偏移量、PID 系数的确定等都是通过计算机控制,MAX232 串口与计算机的通信,很多资料都有介绍,在这里不再累述。
2.3对高压电路的要求
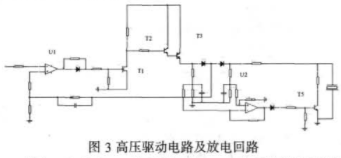
压电陶瓷是利用其在外加电场作用下,具有逆压电效应或电致伸缩效应产生形变。压电陶瓷致动器的驱动电源应具有输出电流大,文波小的特点。我们采用达林顿管构成有源滤波电路,可以实现小文波,大电流的输出。在整流电路中,需要使用高压大电容,需要放电回路,但是使用大电阻放电时间过长;使用小电阻,在工作过长中,电阻上的电流过大,导致电阻发热过大。为此,我们采用两级放电的办法,可以解决以上放电时间长,或电阻功耗过大的问题。两级放电回路原理图如图2 所示。当电容电压很高时,比较器U1 输出低电平,Q1 截止,电容只能通过,大电阻R1,R2 放电,当电容电压低于某个临界值时,U1 输出高电平,电容通过小电阻R3 放电。
如图3 为高压驱动电路及放电回路。输入由D/A 转换输出的信号与反馈信号比较,若输入D/A 转换信号大,U1 输出低电平,截止,电源对压电陶瓷晶体充电。其中T2、构成达林顿管。U2 构成比较放大电路,输出电压与压电陶瓷的电压相比较,若压电陶瓷晶体的电压高,U2 输出高电平,导通,压电陶瓷晶体放电。反之,压电陶瓷晶体充电。
2.4压电陶瓷微位移装置
压电陶瓷(PZT)在外电场的作用下,内部的正负电荷中心产生相对位移,该位移使压电体产生形变,表现为压电陶瓷有一定的伸缩能力。利用压电陶瓷(PZT)的伸缩能力可以实现对倾斜镜的角度控制。其原理如图4:
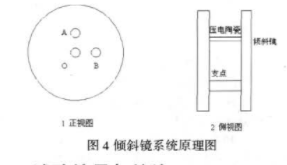
其中,O 为支点,A,B 为压电陶瓷(PZT)。大圆圈代表倾斜镜。压电陶瓷(PZT)的平衡点为驱动器工作在100V 的工作电压下。这样,当驱动电压升高时,倾斜镜向一个方向运动;当驱动电压降低时,倾斜镜向相反的方向运动。
本系统的压电陶瓷(PZT)在200V 电压下可以伸长30μm,即压电陶瓷(PZT)的前后变化范围为15 μm 。OA、OB 的长为5 cm 。计算可知,倾斜镜前后变化范围为0.3 mrad 。又由于望远镜的放大倍数为10倍,
所以,本系统可以调节抖动在3 mrad 以内的光斑。完全能满足我们的要求。
3.试验结果与结论
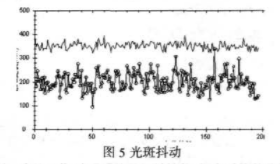
试验结果表明,本系统可以实现40Hz以内大气扰动的校正,并且有很好的校正效果。下面我们给出具体的分析结果:采集数据是在下午3 点到4 点,当时的大气相干长度为5.5-7 之间。图5 光斑抖动情况。图中带圆圈线反映的是光斑抖动情况,从图中我们可以看出光斑抖动的范围比较大,并且包含高频成分和低频成分。不带圆圈线反映的是跟踪之后的光斑抖动图像。从图可以看出光斑的抖动范围非常的小,并且以高频成分为主,也含有一定的低频成分。这是因为:一方面由于大气湍流引起一公里光斑抖动是微弧度量的,光斑抖动非常的小,超出PSD的分辨率,另一方面由于机械抖动引起的光斑抖动。
下一步的工作:改进系统的机械性能、提高系统的分辨率并进一步提高系统的带宽。
责任编辑:gt
-
传感器
+关注
关注
2550文章
50988浏览量
752947 -
CCD
+关注
关注
32文章
879浏览量
142212 -
单片机
+关注
关注
6034文章
44546浏览量
634369
发布评论请先 登录
相关推荐
用于16位dsPIC数字信号控制器的dsPIC33F MicroStick开发板
dsPIC33F具有哪些特性参数应用?
dsPIC30F to dsPIC33F Conversio
dsPIC33F单片机的程序升级探讨

基于dsPIC33F单片机的应用程序升级方法

基于DSPIC33F的马达控制方案

dsPIC33F系列参考手册之看门狗定时器和节能模式


dsPIC33F数字信号控制器和PIC24H单片机编程规范详细中文资料概述





 工商网监
工商网监
评论