 基于TMS320F2806实现感应电机矢量控制硬件设计方案
基于TMS320F2806实现感应电机矢量控制硬件设计方案
随着DSP和功率器件的发展,变频调速技术已成为科技发展的主要动力。随着带有实时信号处理器的电机控制专用器件和高集成度的智能功率模块(IPM)的引入,使得变频器供电的感应电机控制系统应用广泛。由于功率变换器能实时调节电机电压、电流幅值和频率,所以这种控制系统可获得最佳性能。
传统的恒压频比控制是感应电机最基本的常用控制方式之一,但这种方式是从电机的机械特性出发分析电机的运行状态和特性的,动态效果不理想。而感应电机矢量变换控制可使感应电动机的调速性能与直流电机相媲美。矢量变换技术巧妙实现感应电机磁通,转矩的重构和解耦控制,从而使感应电机调速系统趋于高性能。实现矢量变换控制需要实时完成坐标变换、转速控制、电流检测、磁链估计、PWM信号生成及故障检测保护等功能,处理数据量大,实时性和精度要求高。与传统的单片机相比,DSP具有高集成度,快速的CPU,大容量存储器,可提供高速同步串口和标准异步串口,尤其是DSP精简的指令系统、独立的程序和数据空间等使其具有高速的数据运算能力,可设计出结构简单、性能优越的矢量控制调速系统,因此DSP广泛应用于电机控制系统。
本文介绍了TMS320F2806的基本结构和性能,给出了感应电机矢量控制(转子磁场定向控制)的硬件设计方案、软件控制算法。该系统设计充分利用TMS320F2806丰富的外围元件和较强的运算能力,系统电路结构简单,抗干扰强。实验结果表明,该矢量控制系统具有良好的动静态调速性能。
2 TMS320F2806简介
TMS320F280x系列是美国德州仪器公司的数字信号处理器,该系列处理器是基于TMS320C2xx内核的定点DSP,是集成度较高、性能较强的运动控制系列器件。器件内部集成多种先进的外设,为电机及其他控制应用提供良好平台。TMS320F280x系列内部功能结构如图1所示。
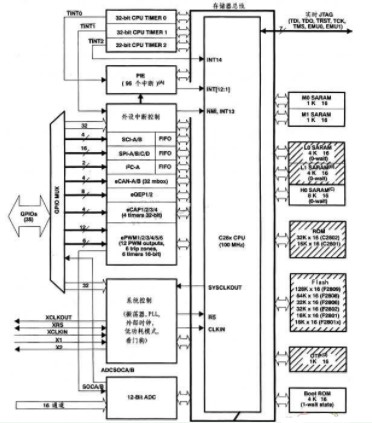
TMS320F280x系列数字信号处理器与先前的TMS320F24x系列相比,提高了运算精度和系统处理能力;与TMS320F281x DSP控制器相比。省去了TMS320F281x DSP中的两个事件管理器模块EVA和EVB,事件管理器模块的功能由增强型外设模块ePWM、eCAP和eQEP取代,使得设计人员能有效地解决富有挑战性的控制问题。TMS320F280x高速的运算能力保证了控制实时性,大容量存储空间无需扩展片外RAM就能满足存储需求,保证了控制系统的高度可靠性,是电机数字化控制的升级产品。TMS320F2806的主要特点如下:
采用高性能静态CMOS技术,内核与I/O的供电电压分别为1.8 V和3.3 V,降低了控制器损耗;100 MI/s的执行速度使指令周期缩短至10 ns,提高控制器的实时控制;
片内含有高达32 KB×16的Flash程序存储器、10 KB×16 bit的SRAM、10 KB×16 bit的OTPROM以及4 KB ×16 bit的Boot ROM;
12位A/D转换器,最小转换时间为160 ns,8个或16个多路复用输入通道,采样时间与转换时间分开,提高了采样率和输入阻抗。支持自动顺序采样,无需CPU干预;
多达16路的PWM为高效的马达控制(双电机控制)提供便利,其中6路为HRPWM(高分辨率脉宽调制),时间步长精度高达到150 ps,可控制所有类型电机;
eCAN总线控制器可为控制器、传感器、激励源以及其他节点提供良好通讯,适用于工业现场和汽车等大噪声和恶劣环境。
3三相感应电机系统硬件电路设计
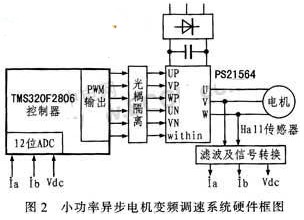
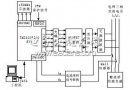
基于TMS320F2806控制的小功率异步电机变频调速系统硬件框图如图2所示。变频器系统采用DSP作为运算控制单元,功率电路变换单元采用三菱公司的第五代低功耗智能型模块(IPM) PS21564,采用莱姆公司的霍尔电流传感器检测电机两相电流,采用霍尔电压传感器检测逆变器的母线电压。三相工频电源经整流桥整流,经电容滤波得到直流电压,送至逆变器IPM模块的直流输入端的P端和N端。TMS320F2806控制器对检测信号进行运算处理,空间矢量算法产生3个互差120°的3对SVP-WM脉冲信号,经光电隔离后作用于PS21564控制输入端(UP、VP、WP、UN、VN和WN)。PS21564的输出端U、V和W输出3个互差120°的高压SVPWM波形以驱动异步电机,改变其输出频率,实现异步电机变频调速。由于PS21564具有短路、欠压、过热检测电路及保护功能,当发生故障时,PS21564锁存内部6只ICBT功率管,同时将故障信号发送至TMS320F2806的功率保护中断引脚;TMS320F2806立即锁存PWM波形的输出,并向TMS320F2806发送功率保护中断请求。
4三相感应电机矢量控制软件设计
矢量变换控制(简称矢量控制)是以电机物理结构建立的系统数学模型为基础,经一系列矢量变换(三相-两相变换(Clarke变换)、矢量旋转变换(Park变换、Park逆变换),将原来系统数学模型变换成公共坐标系统中的等效正交两相模型(dq模型),独立控制公共坐标系统中相关矢量(如电流或磁链等)的各分量.利用矢量的反变换获得三相坐标系统中的控制量(如电流、电压)大小,实现感应电机的控制。
感应电机矢量变换控制中的公共坐标系统(dq)通常将d轴建立在某一磁场对应的矢量位置上,也就是由该磁场矢量确定公共坐标系统,因此感应电机矢量变换控制也称为磁场定向控制(Field-Oriented Control,简称FOC)。三相感应电机存在三种磁场:定子磁场、气隙合成磁场、转子磁场,因此有三种磁场定向控制方法。本系统控制采用转子磁场定向控制。
4.1三相感应电机矢量控制算法
为了达到高精度的转速闭环控制及磁场定向,必须在电机轴上安装速度传感器。但许多场合不允许外接任何速度和位置检测元件,安装速度传感器在一定程度上会降低调速系统的可靠性,因此本文采用基于转子磁通定向的无速度传感器矢量控制变频调速。转子磁场定向算法功能框图如图3所示。本系统设计关键在于通过磁通估计模块计算磁链和磁通角,然后通过开环速度估计模块估算转子角速度。图3中的上标"s"、"e"分别表示静止坐标系和同步旋转坐标系,上标"i"、"v"分别表示电流模型和电压模型,下标"d"、"q"分别表示d轴和q轴上的矢量分量,下标"s"、"r"分别表示定子和转子的参数。
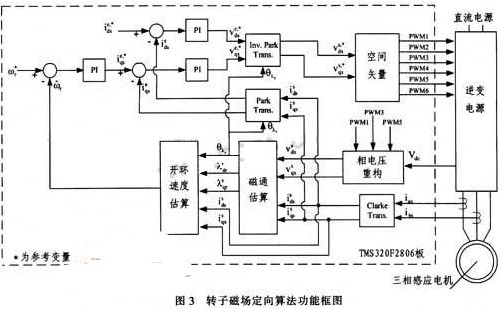
为使系统具有良好的动态性能和稳态精度,速度控制器和电流控制器采用积分分离的PI控制,定子电流的转矩分量给定值ie*qs和励磁分量给定值ie*ds都在同步的旋转坐标系中给出,ie*qs是速度控制器的输出,ie*ds与转子磁链给定值成比例,可直接给出。两个电流控制器的输出即为定子电压矢量给定值在同步旋转坐标系中的两个分量ve*qs、ve*ds,它们经过逆Park变换和空间矢量变换模块,再由DSP的脉冲发生电路最终生成PWM信号。电流反馈信号经Clarke变换和Park变换得到两个电流的反馈量ieds和ieqs。磁通估计模块的输入由电压反馈信号经相电压重构模块的输出和Clarke变换的输出构成,通过磁通估计模块算法计算转子磁通角θλr,最后由速度估计模块得到速度的反馈值?r。
4.2三相感应电机矢量控制软件实现
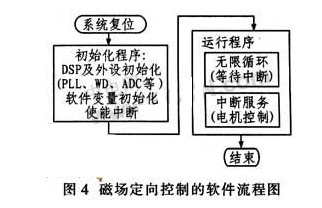
控制软件由初始化程序和运行程序组成,其软件流程图如图4所示,其中初始化程序完成DSP硬件及软件变量的初始化及使能中断。运行程序则包括无限循环和中断服务程序,中断服务程序由电流及转速检测信号处理、坐标变换、磁通估计、开环转速估计、SVPWM信号产生等功能模块构成。各功能模块依照一定的顺序,在固定的时间周期内执行,利用EPWM1时基CNT_zero中断启动程序的运行。
5 实验结果
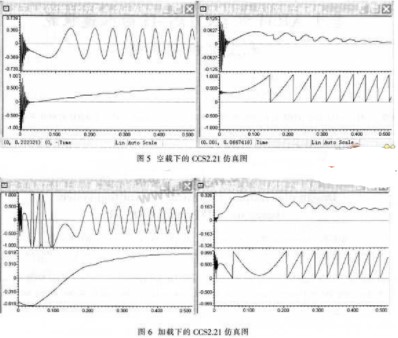
为了使系统具有良好的可移植性.对所有物理变量(电流、电压、磁链、磁通角、速度、转矩等)都进行归一化(Per Unit-Pu)预处理。其中:电机转速参考值设置为ω*r=0.5Pu=900 rpm(1Pu=1 800 rpm)、负载转矩T1=0.136Pu(1 N.m)、励磁分量给定值ie*ds=0.4Pu(2 A)。本系统以TMS320F2806 DSP为核心,采用32位定点算法(调用IQmath库函数),用C语言编写程序,通过CCS2.2开发环境仿真试验,电机空载和加载运行结果如图5、图6所示。对照两种仿真结果看出,本设计方案无论空载还是加载,电流波形正弦良好。系统能迅速达到稳态几乎无超调,且稳态误差小,电机运行平稳。
6结束语
实验结果表明,本文所提出的无速度传感器矢量控制方案设计合理,控制精度高,具有良好的动静态性能。该系统是基于高性能数字信号处理器TMS320F2806,结合传统电压模型法和电流模型法的优点,在高速和低速范围内都能准确地观测磁链,实时完成变换控制策略的坐标变换、转速控制、电流检测、磁链(磁通)估算、PWM信号生成,从而实现三相感应电机的高性能变频调速控制。
-
传感器
+关注
关注
2548文章
50664浏览量
751939 -
dsp
+关注
关注
552文章
7962浏览量
348252 -
电机
+关注
关注
142文章
8930浏览量
145088
发布评论请先 登录
相关推荐
请问TMS320F2802和TMS320F2806能不能同时输出4路独立的PWM?
请问TMS320F28069F和TMS320F28069有区别吗?
数字信号处理器TMS320F2806电子资料
TMS320F2809, TMS320F2806, TMS3
基于MRFAS模型的感应电机无速度传感器矢量控制系统
基于TMS320F2806的感应电机控制系统
TMS320F2808实现矢量控制变频调速系统

基于TMS320F240的矢量控制变频调速系统





 工商网监
工商网监
评论