 利用TMS320F2806型DSP实现太阳光线自动跟踪控制系统的设计
利用TMS320F2806型DSP实现太阳光线自动跟踪控制系统的设计
1 引言
精确捕捉太阳光线可提高太阳能装置,尤其是聚光类太阳能装置的太阳能利用率。现有的聚光类太阳能发电系统主要采用程序控制、传感器控制、程序与传感器联合控制的方法。程序控制方法是计算出太阳在一天中的位置,并通过电机驱动装置运动到目标位置,该方法可克服传感器控制的缺点,但存在累积误差,且程序复杂,对控制器要求较高;传感器控制方法是实时测量太阳光的方向,但实际应用中存在跟踪死区,跟踪范围窄;而程序与传感器混合控制的方法虽然在任何气候条件下都能得到稳定而可靠的跟踪控制,但由于成本和可靠性等问题,一直没有被规模化使用。为更好地采集太阳辐射能量,降低发电成本,提高跟踪装置可靠性,这里对太阳光线自动跟踪方法进行研究,并利用TMS320F2806型DSP为主控制器设计模拟跟踪控制系统。
2 跟踪方法
2.1 模拟跟踪装置
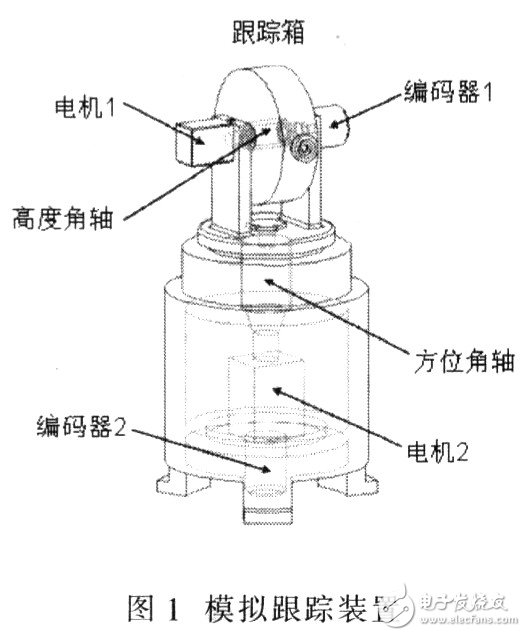
太阳光线的入射角是时刻变化的,为使跟踪装置在不同季节、不同日照时间都能精确地捕捉太阳光线人射角,机械结构采用双轴跟踪:利用高度角一方位角式全跟踪,通过两电机分别控制高度角轴与方位角轴位置,如图1所示。跟踪箱内装有跟踪传感器,电机1控制高度角轴,电机2控制方位角轴,两轴的合成运动使跟踪镜头始终跟随太阳入射光线。编码器1、编码器2分别检测高度角轴与方位角位置。
3.2 传感器检测电路
由跟踪策略可知,传感器需要检测的信号主要包括:光线强度、光电池一三象限电压差、二四象限电压差。这里主要介绍电压差检测电路。
由于光电池短路电流在很宽的光线强度范围内与光线强度成线性关系,在设计时利用其短路电流特性。在光电池的输出端串联取样电阻,将电流的变化转化为输入电压的变化。高度角与方位角跟踪原理相同,以高度角跟踪电路为例,信号检测电路如图3所示。
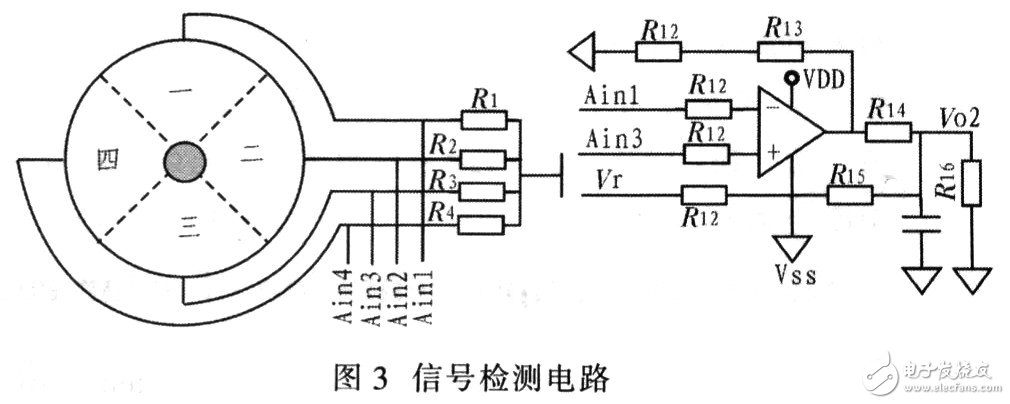
图3中Ain1、Ain3为采样输入端,分别连接光电池一三象限。当太阳光斑在光电池上移动时,光电池上一三象限的输出电流不等,经过电阻R1、R2采样后,送入差动放大器。R16为模拟量输入端的取样电阻,取电阻R13=R15。
由于所选控制器的模拟输入电压范围为0~3 V,而光线聚焦在光电池上形成光斑后,光电池两象限的电压差有正负。因此需在差动放大器同相输入端加一偏置电压Vr,使放大器输出的零点电压(当放大器两输入端均为零时,A/D转换模块检测的电压值)为1.5 V,以保证模拟输入电压始终为正值。根据运放工作在线性区的依据:(1)输入端电流为零;(2)U+=U-。假设采样输入端电压为Uin1、Uin3,经过计算得到通过R14的电流I为:

A/D转换器采样的模拟输入电压,即R16两端电压为:

当传感器主光轴对准入射光线高度角时,光电池一三象限压差Uin1-Uin3=0,此时VO2等于偏置电压的放大值,即电压基准值,设其为U,则:


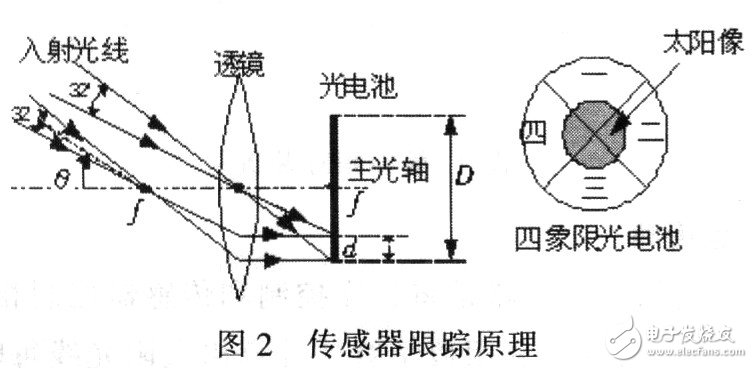
由式(4)和式(5)可知,在光电池直径恒定,且光斑完全落在光电池上时,若焦距f越大,则d越大,θ越小。即焦距越长,太阳像越大,光电池能检测的太阳光线范围越小。
所使用的透镜焦距为410 mm,光电池直径为25 mm,根据式(4)和式(5)可计算出光电池的检测范围为1.48°,太阳像直径约为3.8 mm,即当粗跟踪将传感器主光轴与太阳入射光线间的夹角调节至1.48°以内时,太阳像便能全部呈现在光电池上,若此时光强满足设定阈值,则可进入传感器跟踪。另外,透镜焦距会影响传感器跟踪分辨率(传感器能检测到的最小光线偏移角度),在其他影响因素一定的情况下,增加透镜焦距,有助于提高传感器的跟踪分辨率,但会降低传感器检测范围,此时就需要提高粗跟踪算法精度。因此,设计时在考虑增加透镜焦距以提高传感器分辨率的同时还必须考虑所选粗跟踪算法的跟踪精度要与传感器检测范围相吻合,以保证粗跟踪后太阳光斑能落到光电池上。
4 控制系统实现
该系统采用粗跟踪与精确跟踪相结合的方法精确跟踪太阳光线,并利用TMS28x系列DSP,其具有精度高、速度快、集成度高的特点,内部集成有串行通信模块、事件管理器、A/D转换器等模块,可满足控制系统各项功能要求。同时,还能实现简单的浮点运算,并满足系统粗跟踪计算要求。图4为利用TM320F2806型DSP作为主控制器设计的跟踪系统控制框图。
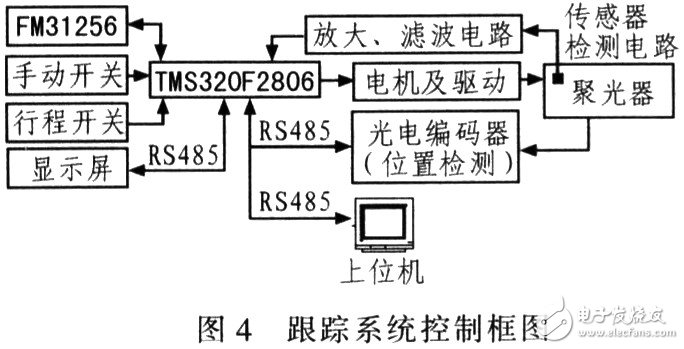
该系统控制硬件主要包括:主控制器、电机及驱动器、跟踪传感器、光电编码器、显示屏等。系统主要完成粗跟踪太阳位置计算、跟踪信号检测、电机驱动、位置检测、显示、监控等功能。对太阳光线的跟踪分为粗跟踪与精定位。粗跟踪由软件实现,精定位由传感器实现。粗跟踪过程中,主控制器根据时间和日期以及观测点经度、纬度计算出太阳的粗略位置,并与编码器检测的跟踪轴位置相比较,根据两者的差值输出控制信号,驱动电机向程序计算的位置运动。跟踪传感器主光轴垂直于聚光器接收面,传感器检测信号经放大和滤波后由控制器采样。跟踪传感器不断检测光电池输出电压信号,并将检测值送至控制器中的A/D转换模块,检测到光线强度满足跟踪阈值后,进入传感器精确跟踪,并根据电压差采样值确定电机转向及速度。光电编码器也用于返回精确跟踪结束后太阳的实际位置。
由于系统需保存各种参数,如位置校准值、当地地理参数等,扩展1个I2C总线铁电存储器用于数据存储。行程开关用于为系统提供极限位置保护。系统的各种跟踪信息可通过RS485总线传输至上位机,同时上位机也可实现控制跟踪装置,包括开始跟踪、回零点、停止等命令。当前跟踪信息,如显示跟踪数据、电机的运行状态、A/D转换值及各种故障信号,都可在现场通过显示屏显示,通过显示屏或手动开关实现手动操作跟踪装置,调试方便。
5 结论
本文设计的跟踪控制系统使用程序控制和传感器控制相结合的方法,实现精确跟踪太阳光线,其特点是:(1)DSP系统具有较好的稳定性,且运算速度快,利用其内部的时间管理器模块简单有效地控制电机运动。(2)具有相应的人机界面,可实现相应参数的显示和远程控制。而在跟踪方法方面,具有以下特点:(1)粗跟踪采用简单算法实现,避免单一的程序控制对现场控制器高数据处理能力和大数据存储空间的要求;(2)单一的程序控制需要两个运动轴的高精度角度传感器作为本地定位检测,而这里所用策略的精确跟踪过程南传感器完成,降低程序控制时系统对角度传感器的精度要求;(3)跟踪范围广,传感器结构简单,价格低廉,跟踪稳定。
-
传感器
+关注
关注
2550文章
51035浏览量
753077 -
dsp
+关注
关注
553文章
7987浏览量
348745 -
太阳能
+关注
关注
37文章
3405浏览量
114187
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论