我目前正在为XC7Z015设计一块电路板,但希望与XC7Z030保持兼容。从UG933第6章关于兼容性:“此外,bank 112包含两个未连接在XC7Z015-CLG485器件上的引脚,但它们连接
2020-08-24 09:30:36
``` 本帖最后由 射频微波技术 于 2019-11-14 17:43 编辑
产品名称:FPGA XC7Z045-1FFG900I特征处理系统(PS)基于ARM Cortex-A9应用处
2019-11-14 16:45:53
(部分已入库)XC4VSX55-11FF1148I 24只( 已入库)XC7Z045-2FFG900I 27PCS ( 已入库)
2019-01-04 20:02:07
本帖最后由 w75815895 于 2020-8-26 14:03 编辑
xc1004四轴SPI运动控制芯片,LQFP48封装。SPI通讯,仅需使用10条指令便可完成复杂工作。单模块四轴输出
2020-07-28 12:21:38
这些方案来制造产品。图1. 自动化机器控制系统 在多轴伺服控制系统中实现同步精密运动 完整的机器控制功能包括多个级联控制环路。考虑丝杠(用于将旋转转变为线性运动)提供的传动装置,CNC将机器空间(x
2016-01-25 16:48:48
基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线
2020-07-29 06:57:04
三单元串联逆变器PWM波形 3 多单元串联大功率逆变电源控制系统的仿真研究 根据上述所采用的控制方法,同时考虑到逆变器的三相控制方式完全相同,因此我们对单相的控制方法,用OrCAD/PSpice
2018-09-26 14:29:31
IPMSM方程IPMSM的矢量控制系统相比较于IM中矢量控制系统还稍微多了点东西,MTPA控制。在dq坐标系下:IPMSM的转矩方程并不是由某一轴的单一电流量控制的其中有dq电流的乘积项,因此需要
2021-08-27 06:28:00
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
PLC控制系统与继电器控制系统的区别最初的工业自动化控制主要是以继电一接触器控制占主导地位,继电一接触器控制系统的缺点是体积大、耗电多、寿命短、可靠性差以及运行速度慢等,而PLC的出现在技术角度
2021-09-06 08:40:33
对于调好了X,,Y轴的四轴在调Z轴的时候,直接对陀螺仪输出的Z轴角速度进行PID控制,但是PID参数无论怎么改还是不能改变四轴逆时针旋转。对于Z轴的调试网上没有任何参考信息,还请那位调过Z轴的朋友能指点下,万分感谢啊。
2019-04-29 06:36:22
求助各位大神,目前想做一个多轴控制的装配机器人,控制轨迹是从A治具上取出配件放置在B治具上,位置应该是一一对应的,目前我想采取的方案是PC+控制卡,但是有一点疑问是,取完A治具上第1排配件放置到B治具第4排产品上后,怎么让控制系统转移到取第2排放置到第5排这个轨迹上?谢谢各位大神了!
2015-08-21 23:02:13
各位大侠,求助呀~运动控制卡采用的是ni公司PCI-7350,用labview编写运动控制系统。以前没有编写过大型的系统,没什么经验,大侠们有没有相关的资料,特别是编写的相关的例子。单轴,双轴,三轴的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
项目名称:工业机器人多轴控制系统试用计划:理由:加大目前使用控制器芯片国产化。替换目前使用的CycloneII做硬件插补电路和外围IO扩展。代码算法移植预计8月份完成,10月份完成波形仿真时序分析,12月份正式进入量产阶段。
2019-06-03 18:02:34
项目名称:XC7Z100的PMBus供电系统设计试用计划:申请理由:研究PMBus芯片在Zynq7000系统中的应用项目名称:XC7Z100的PMBus供电系统设计计划:1,使用PMbus电源板给
2020-06-18 13:40:26
的UI界面,做焊机控制系统项目描述:3轴数控焊接机控制系统,目前是在研发阶段,是嵌入式的硬件控制系统,客户主要在江浙沪一带。目前是采用单片机+FPGA的方案,复杂度较高,上液晶显示器之后,单片机力不从心。
2015-10-27 09:20:23
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
控制的定义:控制负载的机械运动例子:喷墨打印机负载:墨盒目标:使墨盒在纸面上高速、高精度地来回移动运动控制系统的任务是什么?控制被控对象(单轴/多轴)的运动状态控制输出:位移、速度、加速度控制输入:力或转矩运动控制系统的组成一个复杂、高速、高精度的多轴协调运
2021-09-01 07:06:21
什么是运动控制系统?运动控制系统的任务是什么?
2021-10-29 07:40:48
伺服控制系统组成:运动控制卡运动控制卡是一种上位控制单元,可以控制伺服电机,是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机
2021-09-09 06:25:07
嗨,大家好。当我在vivado 2013.4中运行xc7z015clg485时,它会报告'错误:[通用17-69]命令失败:您的设备许可证'xc7z015'仅用于评估或试用目的。此许可证禁用比特流
2018-11-28 15:13:07
(CAM)工具根据产品图纸、材料特性、机器和刀具能力,产生成品所需的机加工操作组合运动方案。然后,由自动化机器执行这些方案来制造产品。图1. 自动化机器控制系统完整的机器控制功能包括多个级联控制环路
2018-10-22 16:50:51
驱动轴的操作和运动方案同步,从而在维持产品质量不变的同时,使机器吞吐效率最大化。 图1. 自动化机器控制系统精密运动控制控制现代工厂所用自动化机器的各种元件如图1所示。中央数字控制器(CNC)或可
2018-10-10 18:13:01
基于ARM7 SoC芯片的空调节能多工况分区及专家控制系统的实现
2012-08-17 23:52:03
基于STM32的四轴无人机的姿态解算与控制系统设计
2019-08-06 20:33:11
摘要:文章通过工作实践并结合相关资料分析了最新无互联线逆变器并联控制基本原理,相比较传统的集中控制、主从控制、分散逻辑控制,总结了各种逆变器并联控制技术的优缺点,结合模块化UPS逆变器并联控制
2018-09-28 16:23:25
实时确定性以太网协议(例如EtherCAT)已经能够支持多轴运动控制系统的同步运行。1 该同步包含两方面含义。首先,各个控制节点之间的命令和指令的传递必须与一个公共时钟同步;其次,控制算法和反馈函数
2019-07-30 07:56:47
如何去实现一种基于单片机RS485的多机通信液晶控制系统设计呢?
2022-02-16 06:35:33
在多轴伺服控制系统中实现同步精密运动
2021-01-27 07:45:40
如何实现中断控制系统的设计?
2022-02-17 07:59:03
你好,我目前正在修改电路设计,用xc7z045 FPGA取代xc7z020 FPGA。目前的设计使用与Zedboard相同的电源排序和电源良好电路。我想知道我是否可以为新设计使用相同的电源排序电路
2020-08-06 10:04:21
现代传动系统要集成控制回路精度、扩展性、网络通信、外设控制、数据和设计安全、功能安全和可靠性等特性,这是十分重要的。此外,电机必须准确并且同步控制,同时不损害性能和确定性,在多轴控制系统中尤其如此。
2019-10-23 08:19:51
现代传动系统要集成控制回路精度、扩展性、网络通信、外设控制、数据和设计安全、功能安全和可靠性等特性,这是十分重要的。此外,电机必须准确并且同步控制,同时不损害性能和确定性,在多轴控制系统中尤其如此。
2019-10-22 07:07:51
实时确定性以太网协议(例如EtherCAT)已经能够支持多轴运动控制系统的同步运行。1 该同步包含两方面含义。首先,各个控制节点之间的命令和指令的传递必须与一个公共时钟同步;其次,控制算法和反馈函数
2019-09-11 11:51:12
实时确定性以太网协议(例如EtherCAT)已经能够支持多轴运动控制系统的同步运行。1 该同步包含两方面含义。首先,各个控制节点之间的命令和指令的传递必须与一个公共时钟同步;其次,控制算法和反馈函数
2019-08-07 07:49:57
你好我们计划使用XC7Z020 PS部分的DDR3内置控制器将其连接到2个芯片[MT41K128M16] -32位数据宽度。我们计划再使用一个DDR3组件来支持ECC。请告知我们XC7Z020 PS中DDR3控制器引脚的详细信息,包括ECC引脚详细信息。谢谢Pench
2020-03-24 09:34:32
USB2.0特点是什么CY7C68013A的主要特点求一中基于CY7C68013A的USB控制系统设计
2021-04-09 06:03:27
采用AT89S51系列单片机、传感器DS18B20和NiosⅡ设计的远程温度控制系统具有结构新颖、电路简单、体积小和控制方便等优点。
2021-04-30 06:09:54
毫米波多通道扫频远场测量系统是一套基于PMAC多轴运动控制器的高精度、多功能、自动化的测量设备。该系统集数据分析、图像处理、系统控制等功能于一体,能方便快捷地完成天线远场测量任务,是天线现代化测试技术的高度集成。
2021-04-09 06:07:25
智能巡线小车的多模式速度控制系统
2012-09-08 10:56:43
1、基于RT-Thread系统和N32G457开发板开发的一室内互联控制系统基于RT-Thread系统和N32G457开发板开发的一室内互联控制系统;硬件部分由ESP8266WIFI模块,蓝牙模块
2022-06-15 15:36:40
{:2:}急用 基于AT89S51和DS18B20的温度控制系统的proteus 系统图
2014-04-09 22:48:24
本帖最后由 WAITXHURT 于 2012-12-27 10:31 编辑
AT89C51+DS18B20+DS1302的温度控制系统 带按键控制
2012-12-11 17:48:04
汽车传动轴防尘罩PLC控制系统的设计与实现 &
2008-09-12 11:29:22
`跪求温室控制系统的原理图和程序,如果有论文的话更好`
2019-05-07 17:16:06
。 旋变数字转换器很多电机控制系统采用可变轴旋转速度工作。为了提供最精确的位置信 息,需使用分辨率灵活的系统。AD2S1210是一款旋变数字转换器,可即时 改变分辨率。这款转换器提供了一种集成式
2018-10-25 10:03:48
时间和共模电压阶跃抗扰度很重要。 差动放大器差动放大器能抑制极高的共模电压,可用于电机控制系统中的电压和电流测量。借助它们,可以在高压工业环境中使用低压转换 器。这在需要进行功能隔离时尤为重要。ADI
2018-10-25 10:18:40
第7章 火灾自动报警和消防控制系统.zip
2017-09-10 13:26:59
继电接触器控制系统和PLC控制系统的主要区别是什么?可编程控制系统和继电器控制系统有哪些异同点?PLC的工作方式是以循环扫描方式进行的。试问PLC的一个扫描周期分哪几个阶段? 主控指令的编程元件有哪些?主控指令使用时应注意哪些方面?
2021-07-02 06:45:41
本帖最后由 ygpotsyyz 于 2020-8-7 20:09 编辑
计算机数字控制系统传统经典之PID编程和z拉普拉斯变换分析 计算机控制系统传统经典之PID(比例,积分和微分)编程和z
2020-08-07 15:32:41
设计一控制系统并仿真:包括设计两个按键(A、B键)、2位7段数码管和一路DA转换电路。每按一次A键数码管从00开始加1显示,到20后,再继续按A键则从F到0减1显示,如此循环。按B键数码管闪烁显示。同时DA转换画出数码管对应的波形阶梯。(
2018-12-23 12:41:59
为什么要设计喷雾降尘控制系统?喷雾降尘控制系统硬件如何去设计?怎样设计喷雾降尘控制系统的软件电路?请问怎么去设计喷雾降尘控制系统?
2021-04-13 07:02:06
嗨人,我为ZC706板生成了位流,部分为xc7z045ffg900-3。但是,我有一个部件为xc7z045-2ffg900-C的电路板。两部分有何不同?我可以在xc7z045-2ffg900-C中
2019-09-30 10:23:22
在泛用机中,支撑贴片头的基座固定在X导轨上,基座不进行Z方向运动。贴片机Z轴控制系统是指贴片头的吸嘴运动过程 中的定位,即取料和贴片过程中的Z方向定位,以适应不同PCB厚度和元件高度,满足贴片
2018-09-04 16:04:10
典型贴片机的X-Y伺服定位系统的位置控制闭环和Z闭环伺服系统控制环路图。 图3 某典型贴片机的高电源伺服系统控制环路图 图4 某典型贴片机的Z轴压下感应闭环伺服系统控制环路图 图5 某典型贴片机的低电源伺服闭环伺服系统控制环路图
2018-09-04 16:04:08
一、 近场测量概念及测量对控制系统的要求近场测量是IEEE协会规定的标准测量方法,该方法因其自身的优点在现代天线测量中得到了日益广泛的应用。由于测量在近区进行,天线的远区辐射特性需经过严格的数学变换
2019-07-22 07:06:33
,年均增长31%,预计2023年我国工业机器人市场增速将在20%至25%左右,仍会维持较快的增速。 飞凌嵌入式作为一家专注嵌入式核心控制系统研发与制造的高新技术企业,经过多年的研发与积累,产品已广泛应用
2023-02-24 17:05:21
电池系统智能恒温控制算法,多控制系统和集成的一种热管理控制器,使得电池的温度在使用过程中不会因为过高或者过低而产生事故。控制器资源 :4路PWM:循环水泵,冷凝风机,MEMS,电子膨胀阀 10路AI
2021-08-13 17:15:57
Elmo公司的 Gold Maestro 是先进的网络多轴运动控制器。Gold Maestro 控制任何多轴场景,无论是简单的点对点运动,还是完整的多轴协调或同步运动。Gold Maestro 依托
2022-01-13 11:49:52
关键词:景观灯控制系统 景观灯无线控制系统 景观灯智能控制系统 城市楼体亮化智能控制系统、景观灯无线智能控制系统、照明亮化无线控制系统、照明亮化集中控制系统、照明亮化远程无线控制系统。导读:济南惠驰
2022-02-14 09:38:14
CRT工业运动控制系统,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及直线曲线加减速控制、I/O 信号的检测处理。DMC600M系列3~6轴运动控制系统
2022-02-26 16:26:24
CRT工业运动控制系统,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及直线曲线加减速控制、I/O 信号的检测处理。DMC600M系列3~6轴运动控制系统,运用
2022-04-25 15:45:55
CRT工业运动控制系统,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及直线曲线加减速控制、I/O 信号的检测处理。DMC600M系列3~6轴运动控制系统,运用
2022-05-11 10:39:05
自动化控制系统的校正:1系统的设计与校正问题2常用校正装置及其特性3串联校正串联超前校正串联滞后校正4反馈校正5复合校正
2009-01-08 14:16:57 3
3 及IQ power防爆检测棒,提供灵巧的系统设计和安装。静电消除控制系统优势:•即插即用扩展系统;•CLFB模式允许检测棒控制离子棒输出;•自动调频技术;•双轴控制;
2022-10-12 14:45:10
设计了基于双DSP 结构的捷联控制与解算系统,该系统以高性能的浮点处理器TMS320VC33 作为捷联系统实时解算的核心,以TMS320VC5402 作为通道控制、数据采集的控制核心,并结合FPGA
2009-08-04 15:44:587 文章设计了一种以高性能控制器DSP为核心构建的逆变电源并联控制系统。在本文的系统设计中,针对单个的逆变器模块以及并联系统的特点,采用新型的逆变电源控制技术,对逆
2009-12-23 11:58:2736 基于滑模变结构控制的逆变器并联控制策略研究摘要:本文研究了一种采用滑模变结构控制的逆变器并联控制策略解决传统的基于下垂特性法、或者是改进的下垂
2010-06-02 17:23:2924 串联控制的锯齿波触发电路
2008-03-23 13:17:29 1008
1008 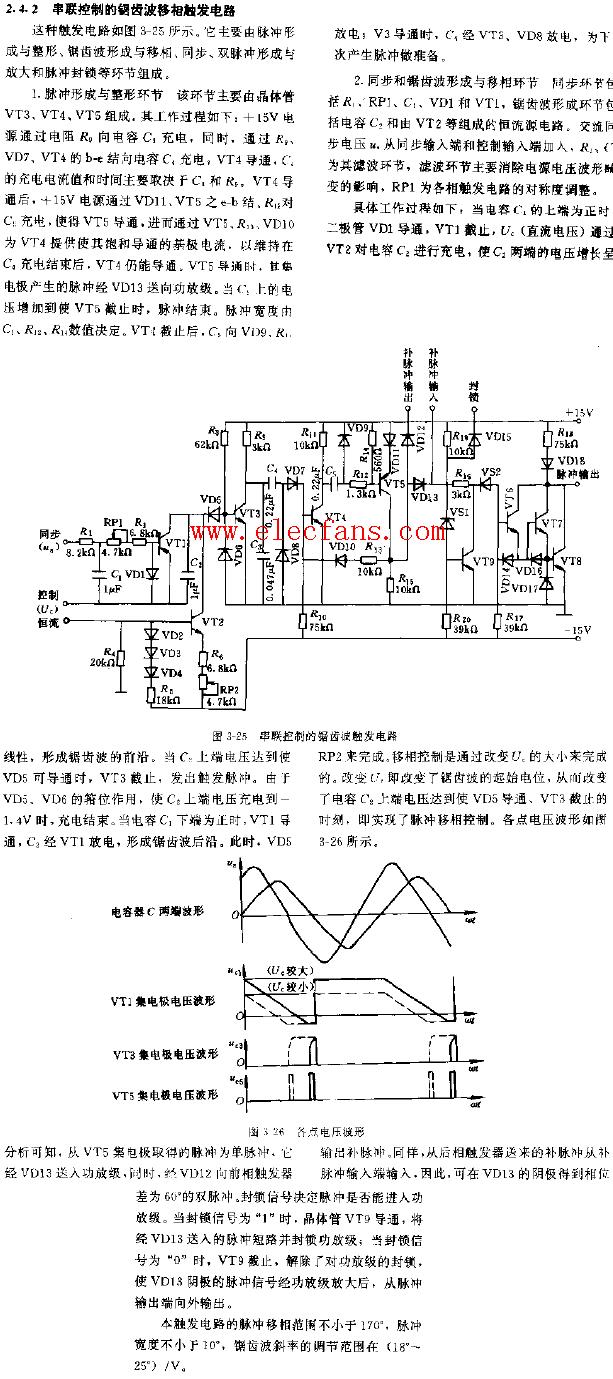
EC20系列PLC在老化房控制系统中的应用
本文能过介绍了艾默生公司EC20 PLC在老化房控制系统中的应用,以及该产品PID闭环功能在恒温控制上的实现和强大的网络通信功能
2009-06-13 16:27:42982 
艾默生EC20系列PLC在空压机联控中的应用
确保合格的供气品质,满足稳定的气源压力,自动调节供气流量等是空压站自动控制的基本任务
2009-06-15 13:22:521043 
PLC控制系统与电器控制系统的区别
从控制方法上看,电器控制系统控制逻辑采用硬件接线,利用继电器机械触点的串联或并联等组合成
2009-06-17 13:39:191530 自动控制系统的设计--基于频率法的串联校正设计
2009-07-27 14:32:173237 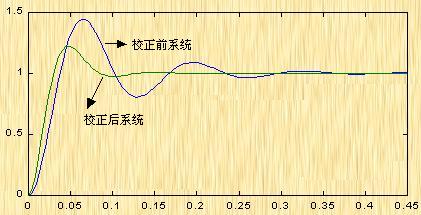
自动控制系统的设计--基于根轨迹的串联校正设计
2009-07-27 14:33:074183 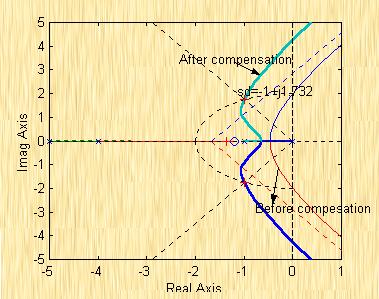
基于双DSP的并联控制系统中串行通信的研究
摘 要:概要地介绍了TMS320F2812 DSP 的基本性能,重点介绍了利用DSP 的SPI 模块进行双DSP 同步串行通信,以及在Visual Basic 6
2010-01-08 10:30:071353 
太阳电池串联均压控制系统原理及设计
近年来,随着太阳电池的生产规模的扩大,太阳电池成本不断下降,对太阳能的利用正在
2010-04-13 17:58:16651 
基于XC866的步进电机阀门控制系统
2011-03-30 17:49:221949 
的发展趋势,分析了基于下垂特性的无互联线逆变器并联控制技术,指出无互联线的并联控制技术将成为未来模块化UPS的发展主流。##人们为了解决集中控制下由于控制中心唯一造成的系统可靠性较差问题,开始将控制单元做到
2014-02-13 10:39:462890 
独立光伏微电网的多逆变器并联控制策略_李浩琛
2016-12-29 14:43:072 串联电池组双向全桥SOC均衡控制系统设计_孙金磊
2017-01-07 15:34:276 输出通过主调节器和调节器电路的过程变量的不同组合被驱动,主调节器被连接到从动调节器设置,这样的控制系统被称为级联控制系统。
2019-06-25 17:21:481407 介绍了逆变器并联控制的实现方案和DSP在并联控制中的应用。对TMS320LF2407A数字信号处理器芯片的特点和逆变器并联控制的软、硬件结构及工作原理进行了详细介绍,并示出实际系统测试结果,表明该系统达到了较理想的并联控制效果。
2021-05-07 09:48:4313 ADG738/ADG739:CMOS,低压,三线制串联控制,矩阵开关数据表
2021-05-08 13:45:2415 ADG728/ADG729:CMOS,低压,2线串联控制,矩阵开关数据表
2021-05-09 15:26:496 UG-1141:ADGS5412串联控制、高压、防闭锁、四路SPST开关评估板
2021-05-16 12:24:550 运营成本、提升产品质量,为企业创造更大的价值。本文将详细阐述如何实现工业现场设备物联控制,包括架构设计与实践方法。 一、工业现场设备物联控制架构设计 1、设备感知层 设备感知层是整个物联控制系统的最底层,主要负责
2023-09-27 15:22:15402
正在加载...
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论