电子发烧友网讯:这是我做的第一个机器人,我会详细记录下每个程序,以方便那些初学者借鉴,准确说来我做的是一个履带式的,由picaxe28x1控制,超声波传感器检测的障碍物躲避机器人。
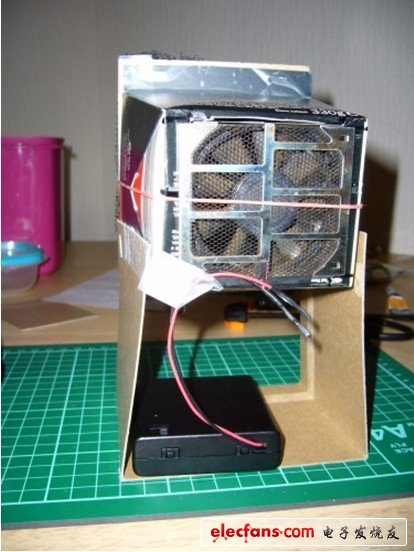
首先我焊接了一个排烟装置。这个风扇我是从一个报废的笔记本上拆下来的,我把它通过一个盒子将其连接到一个碳纤维金鱼缸过滤器上,之后接上电池盒。
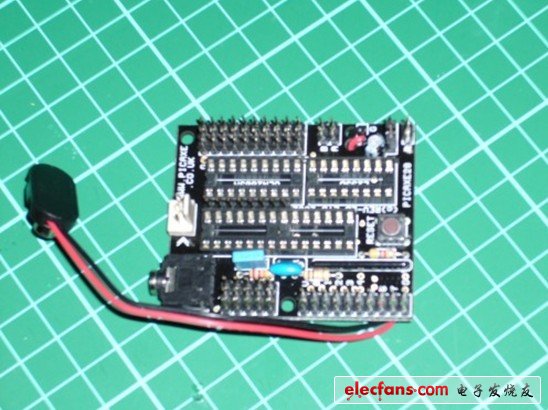
因为我是用F/F跳线连接模块的,因此我需要焊接出相关的针脚,我会在picaxe上面额外添加一些插针,需要注意的是要注意针脚焊接的准确位置和角度。
因为HC-SR04超声波传感器明确的额定电压是5V,而picaxe28X1也是在5V的电压下工作状态才是最佳的,同时我们用到的电机L294D的需要,因此我还做了一个5V的电压调节器去保证超声波传感器免受电压波动影响。这样就可以保证我们机器人模组能工作在一个很稳定的电压状况下。具体做法就是我用一个工作电流1A的,5V固定电压调节器,并将其连接到6个AA电池去提供一个7.2V输入,5V输出的电压。
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...