时Dout会有非常尖的尖峰,这时就要对delError进行限幅。在PID调节中,不允许出现很大的尖峰。 调好D后,NowVal会很好的跟随TargetVal的变化而变化。 三、看图整定参数 1-7
2020-06-23 14:54:44
PID参数的意义与整定方法资料
2015-07-31 09:17:31
PID温度控制参数整定的方法是什么?
2021-11-22 06:13:41
第1章 概述 1.1 人工神经网络研究与发展 1.2 生物神经元 1.3 人工神经网络的构成 第2章人工神经网络基本模型 2.1 MP模型 2.2 感知器模型 2.3 自适应线性
2012-03-20 11:32:43
神经网络算法怎么去控制温控系统,为什么不用pid控制
2023-10-27 06:10:14
求一个simulink的蓄电池用BP神经网络PID控制电机加速匀速减速运动的模型仿真
2020-02-22 02:17:03
【Simulink】FOA优化算法整定PID控制器参数(五)—— 一阶带时延的被控对象目录【Simulink】FOA优化算法整定PID控制器参数(五)—— 一阶带时延的被控对象0研究背景1研究背景2
2021-08-30 06:46:44
如何去实现STM32电机的PID参数整定?如何去编写STM32电机的PID参数整定的代码?
2021-09-23 08:07:13
本文主要介绍PID参数的作用原理,参数整定的经典计算方法,通过看曲线整定PID参数的方法,串级控制、纯滞后对象。回复帖子查看资料下载链接:[hide][/hide]
2021-08-05 10:10:47
人工神经网络(Artificial Neural Network,ANN)是一种类似生物神经网络的信息处理结构,它的提出是为了解决一些非线性,非平稳,复杂的实际问题。那有哪些办法能实现人工神经网络呢?
2019-08-01 08:06:21
简单理解LSTM神经网络
2021-01-28 07:16:57
优化神经网络训练方法有哪些?
2022-09-06 09:52:36
一直以来,关于PID整定都在进行手动调试,例如试凑法、1/4衰减曲线法、齐格勒-尼柯尔斯整定法等; 虽然上述方法都可以完成对参数的整定,但是需要非常丰富的调试经验才能达到预期的目的。同时,当需要控制
2021-08-31 08:41:30
这种情况是怎么回事;求教下相关PID参数整定方法,涉及到温度控制方面的。另外通过Autotunning PID参数调出PID整定向导,整定出来的参数在控制过程中,效果也不太好。
2015-05-05 16:20:33
卷积神经网络模型发展及应用转载****地址:http://fcst.ceaj.org/CN/abstract/abstract2521.shtml深度学习是机器学习和人工智能研究的最新趋势,作为一个
2022-08-02 10:39:39
.模糊参数自整定PID控制器的设计与仿真研究[J].中原工学院学报, 20O7,18(1):65-67 [5] 刘学东.模糊自整定PID控制器参数的设计[J].河北理工学院学报,2004,26(1
2019-04-17 09:40:02
神经网络可以建立参数Kp,Ki,Kd自整定的PID控制器。基于BP神经网络的PID控制系统结构框图如下图所示:控制器由两部分组成:经典增量式PID控制器;BP神经网络...
2021-09-07 07:43:47
作者:李云红0 引言自20世纪70年代以来,模拟电路故障诊断领域已经取得了一定的研究成果,近年来,基于神经网络技术的现代模拟电路软故障诊断方法已成为新的研究热点,神经网络的泛化能力和非线性映射能力
2019-07-05 08:06:02
PID调节器参数整定方法很多,常见的工程整定方法有临界比例度法、衰减曲线法和经验法。本帖以图文形式分别介绍调节器参数整定方法。调节器参数 yunrun.com.cn/tech/440.html临界
2017-12-26 21:40:51
通常是用什么算法实现自整定的
2023-10-23 06:08:41
怎样去整定PID的参数呢?PID参数的整定方法有哪几种?有哪位大神遇到过这个问题
2021-07-06 06:01:03
MATLAB/SIMULINK工具对该方法进行验证,实验结果表明该方法在全程速度下效果良好。
纯分享帖,点击下方附件免费获取完整资料~~~
*附件:无刷电机小波神经网络转子位置检测方法的研究.pdf
2025-06-25 13:06:40
求一个基于BP神经网络PID控制器应用于双闭环直流调速系统BP_PID控制器学习参数怎么设置?
2021-10-13 08:10:12
小女子做基于labview的蒸发过程中液位的控制,想使用神经网络pid控制,请问这个控制方法可以吗?有谁会神经网络pid控制么。。。叩谢
2016-09-23 13:43:16
小弟试过了用labview里的pid例程里的Plant作为被控对象,但是自整定不成功,求高手帮忙,谢谢
2012-04-25 09:19:52
如何去设计模糊PID自整定控制器?关于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特点?
2021-04-21 06:08:28
PID参数的虚拟控制器。将此控制器用于时控系统,控制效果理想,鲁棒性强。关键词:模糊参数自整定PID MATLAB Simulink 基于LabVIEW与MATLAB的模糊参数自整定PID控制.pdf
2019-04-03 09:40:03
有关神经网络PID 控制的文献中使用的大都是PID 的一般控制算法,而性能相对优于一般PID 控制算法的不完全微分PID算法则很少用于神经网络控制中。神经网络与不完全微分的PID 算
2008-12-20 15:13:58 20
20 有关神经网络PID 控制的文献中使用的大都是PID 的一般控制算法,而性能相对优于一般PID 控制算法的不完全微分PID算法则很少用于神经网络控制中。神经网络与不完全微分的PID 算法
2009-01-07 15:40:523 基于衰减频率特性的PID参数优化整定研究Researching the Tuning Optimization of PID Parameters Based on Attenuated Frequency Characteristi
摘要:用衰减频率特性法整定PID控制器可使闭环系统获
2009-01-11 12:06:3319 基于FPGA 的神经网络自整定PID 控制器设计The De ign of Neural Network Self_Tuning PlD Controller Ba ed on FPGA
摘要本文基于FPGA(现场可编程门阵列)技术实现了改进的BP 网络自整定PID
2009-01-12 16:50:3040 摘要:传统的继电振荡PID 参数自整定方法由于在整定期间要使系统处于临界振荡状态,并且整定周期较长,限制了在许多工业控制过程中的应用。介绍了一种基于开关阶跃响应算法的
2009-01-17 21:51:0934 对PID算法及参数自整定进行了研究,介绍了!"# 控制算法在温控系统中的应用,给出了以ASTROM提出的极限环法为基础实现PID参数自整定的原理及软件实现。在此基础上提出了一种基于P
2009-03-13 11:24:30105 PID控制器参数的优化整定一直是自动控制领域的研究热点。提出一种利用改进思维进化计算(MEC)优化PID控制器参数的方法,在原有算法的框架上,加入自调整操作,依据进化方向
2009-03-15 02:39:5131 本文提出一种基于BP 神经网络的新型智能PID 控制方法和一些BP 神经网络的基本概念。同传统的PID控制相比较,神经网络智能PID 控制有许多优点。把BP 神经网络的PID 控制方法应用
2009-05-26 11:19:3635 提出利用CMAC 神经网络与PID 的复合控制,实现非线性系统控制。由于CMAC 网络的优点使PID 控制效果有很大提高。仿真实验表明了该方法的有效性。关键词:神经网络;PID 控制;非
2009-06-11 09:16:5123 针对工业过程中再热汽温等一类大迟延惯性时变对象,采用模糊自整定PID 控制器对PID 参数调节和优化,该方法将模糊技术与PID 控制综合起来,实现了PID 控制的智能化。仿真
2009-06-11 09:20:3530 为了消除造纸工业抄纸过程中存在的解耦问题,提出了一种基于PID 神经网络的解耦方法。文章在介绍PID 神经网络原理的基础上,给出了二变量PID 神经元网络解耦控制系统结构图,
2009-06-15 10:10:4719 阐述了CMAC 神经网络的基本原理,并结合PID 控制的特点,将CMAC 神经网络与PID 复合控制算法应用在工业领域的温度控制系统中,并同传统的Zieglar-Nichols 阶跃响应法及单纯形算法作了
2009-06-20 09:21:3618 本文基于FPGA(现场可编程门阵列)技术实现了改进的BP 网络自整定PID 控制器的设计。首先,采用MATLAB 设计控制器,针对特定被控对象模型,在闭环控制系统中通过改进的BP 网络算
2009-07-21 17:11:400 将神经网络和PID 控制相结合,提出了一种基于对角递归神经网络整定的PID 控制策略,并将其应用于交流伺服系统的控制。利用对角递归神经网络在线自适应调整PID 控制器的参数,
2009-07-30 09:40:1210 本文介绍了小脑模型神经网络CMAC的原理及基于CMAC与PID的并行控制设计,以及该设计在换热器控制中的应用,并对该设计在MATLAB下进行了仿真,得到了较好的控制效果。 关键词:小
2009-08-03 11:41:3210 积分过程在工业过程控制中经常遇到,采用常规的PID 参数整定方法很难得到理想的控制效果。本文采用基于H∞回路成形的鲁棒PID 参数整定方法,实现对积分过程的有效控制。通过Si
2009-08-07 09:51:168 为了改善工业控制系统的动态调节品质,运用BP 神经网络控制算法设计了一种神经网络PID 控制器,并给出了基于西门子PLC 的神经网络PID 控制器的实现方法,仿真和实验结果表明
2009-08-10 11:12:3243 本文讨论了使用BP 神经网络PID 控制算法,并且将这种控制算法应用在漂白工段的控制当中。利用神经网络自学习能力,在线整定PID 控制参数。实践证明BP 神经网络PID控制器具有
2009-08-15 10:27:3635 在小脑神经网络(CMAC)与PID 并行控制的基础上,提出了一种新型的CMAC 控制器,即CMAC 控制器。这种把小脑神经网络与模糊控制(Fuzzy)结合起来的控制方法,具有两种控制方法的优
2009-09-12 16:09:3616 本文讨论了神经网络PID 控制策略,利用神经网络的自学习能力进行PID控制参数的在线整定,并使用Matlab 软件进行了仿真研究。仿真结果表明,神经网络PID 控制器参数调整简单,具
2009-09-14 16:53:3565 提出了在采用最近邻聚类算法在线构造RBF(NN1)正向辨识器,并在线辨识被控对象的Jacobian阵的基础上,引入RBF(NN2)对PID控制器参数进行在线调整的算法。该算法可以实现PID控制参数的自动
2010-02-11 15:07:2818 一种积分过程PID自整定方法:针对积分加滞后过程,提出了一种设定值加权的pid控制器参数自整定方法,并且针对该方法定义了一种鲁棒性能指标.首先引入一种内部反馈结构,利用
2010-03-18 15:58:0721 在小脑神经网络(CMAC)与PID并行控制的基础上,提出了一种新型的CMAC控制器,即FCMAC控制器。这种把小脑神经网络与模糊控制(Fuzzy)结合起来的控制方法,具有两种控制方法的优
2010-07-20 15:41:5810 详细介绍了CMAC神经网络结构" 中间层作用函数地址的计算方法" 输出层权值的学习算法# 并利用CMAC神经网络对水下机器人深度模糊控制器进行了学习$ 仿真结果表明% 训练得到的
2010-07-22 15:49:5925 PID控制器 神经网络
2010-08-18 16:26:1035 【摘要】基于神经网络实现智能PID控制的策略,它以经典的PID控制为基础,通过神经网络参数整定实现,进而进行自学,用于多变量系统的解耦控制。本文给出了网络的结构和算法,对
2010-08-25 11:09:3429 实验 PID的参数整定及参数变化对系统的影响综合实验
一、 实验目的:1、 掌握PID各校正环节的作用2、 确定给
2009-05-17 10:35:55 29482
29482 
基于FPGA的人工神经网络实现方法的研究
引 言 人工神经网络(Artificial Neural Network,ANN)是一种类似生物神经网络的信息处理结构,它的提出是为了
2009-11-17 17:17:201428 
基于FPGA的人工神经网络实现方法的研究
引言
人工神经网络(ArtificialNeuralNetwork,ANN)是一种类似生物神经网络的信息处理结构,它的提出是为了解决一些非线
2009-11-21 16:25:245007 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控
2010-07-20 18:10:571306 应用
CMAC神经网络具有小脑的机能,因而,被广泛应用于机器人的运动控制。或者反过来说,正是为了机器人的运动控制,Albus构造了CMAC神经系统,以模拟脊椎动物
2010-08-09 14:57:161813 
基于RBF神经网络整定PID的风力发电变桨距控制
2011-10-14 15:42:3925 针对传统PID控制系统参数整定过程存在的在线整定困难和控制品质不理想等问题,结合BP神经网络自学习和自适应能力强等特点,提出采用BP神经网络优化PID控制器参数。其次,为了加快
2012-03-20 10:50:0444 基于BP神经网络的PID控制器的研究与实现:
2012-04-01 15:20:5115 文中将BP神经网络的原理应用于参数辨识过程,结合传统的 PID控制算法,形成一种改进型BP神经网络PID控制算法。该算法利用BP神经网络建立系统参数模型,能够跟踪被控对象的变化,取
2012-07-16 15:53:0851 针对传统方法难以整定船载雷达伺服系统PID参数的问题,将模糊参数自整定PID控制技术应用到伺服系统位置回路中,通过仿真实验表明该方法可以不依赖系统的数学模型,而根据输入输
2013-07-25 17:47:0328 该系统采用自校正控制原理和常规PID控制相结合的算法!能快速整定出PID控制器的参数
2013-09-23 17:17:1961 A_PID调节器的调节过程及其参数的整定方法。
2016-03-31 16:57:3423 PID参数整定方法的研究-2009,下来看看。
2016-03-31 17:01:4920 PID控制器参数整定方法及其应用研究-2005。
2016-03-31 17:05:5620 PID控制器设计与参数整定方法综述-2005
2016-03-31 17:46:3327 PID调节器参数的继电自整定方法-1998
2016-03-31 17:46:3316 参数自整定PID控制器设计与仿真,下来看看
2016-03-31 17:46:3336 基于MATLABSimuIink的PID参数整定-2009
2016-03-31 17:46:3313 基于MATLAB的模糊自整定PID参数控制器计算机仿真+(1)
2016-03-31 17:46:3321 模糊PID自整定在热交换站微机控制系统中的应用2003
2016-03-31 17:46:3318 基于参数自整定模糊PID控制策略的电机模型仿真研究-2004。
2016-04-05 11:14:2020 永磁同步电机模糊PID参数自整定-2011。
2016-04-06 14:26:0423 PID教程之PID参数整定方法及其应用研究
2016-09-01 15:01:520 PID控制最通俗的解释与PID参数的整定方法
2017-01-04 14:47:1544 PID算法是工程控制领域常用的一种算法,其有着技术成熟,不需要建立数学模型,参数整定灵活,适用性强,鲁棒性强,控制效果好等优点,得到了广泛的应用,其参数整定对控制效果影响极大,针对增量式的PID的参数整定方法在现有的文献中较少涉及,本文将对增量式PID参数整定进行一定的探讨。
2017-11-24 16:27:2717028 
PID控制是最早发展起来的控制策略之一,因为它所涉及的设计算法和控制结构都很简单,因此,被广泛应用于过程控制和运动控制中。但在实际系统设计过程中,设计师经常受到参数整定方法繁杂的困扰,PID控制器
2017-11-24 16:42:5039332 
模糊神经网络是将人工神经网络与模糊逻辑系统相结合的一种具有强大的自学习和自整定功能的网络,是智能控制理论研究领域中一个十分活跃的分支,因此模糊神经网络控制的研究具有重要的意义。本文旨在分析模糊神经网络的优缺点及其用途。
2017-12-29 15:35:3328274 PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。阅读本文不需要高深的数学知识。
2018-05-31 08:40:4447 本文介绍了基于AVR单片机的自整定PID控制器的设计.该控制器以FESTO水位为控制对象,控制核心为ATmega128单片机.采用继电自整定PID算法,并用LED数码管实时显示控制情况.实验结果表明,本设计可以根据实际情况在线自整定PID参数.控制效果快速,平稳,超调量小。
2018-11-02 11:22:0026 PID 控制算法简单、应用广泛,既能消除余差,又能提高系统的稳定性,但其P 环节、I 环节、D 环节的控制参数却参数难以整定;BP 神经网络算法具有很强的数字运算能力,因此,可通过BP 神经网络
2019-10-11 16:06:4841 将模糊控制与PID控制结合,利用模糊推理方法实现对PID参数的在线自整定。使用MATLAB对系统进行仿真,结果表明系统的动态性能得到了提高。
2019-11-13 15:16:0741 深入研究了PID控制理论,运用了多种方法设计了PID控制器。内容包括两个部分,其中第一部分为前四章,主要是关于单变量PID控制器的参数整定研究。
2019-12-04 08:00:0028 图1显示了模糊CMAC神经网络的结构和运算过程。模糊CMAC神经网络可以用于近似一个非线性映射y(x):Xn→Ym,其中Xn∈Rn是在n维输入空间中的应用,Ym“∈Rm是在m维输出空间中的应用[1,2]。模糊CMAC算法由决定一个复杂函数值的两个初等函数组成,如图1所示。
2020-04-25 17:30:002298 
自构造RBF神经网络及其参数优化说明。
2021-05-31 15:25:019 数字PID及其参数整定方法介绍。
2021-05-31 16:34:2227 可以得到各种输出响应特性,也就是说,通过适当给定PID参数,大多数的控制任务都可以由PID完成。本文根据经典PID控制理论,结合玖阳自动化科技公司的一线通模块,详细介绍PID参数在整个控制过程中所起的作用,指导PID控制中的参数整定。
2021-06-01 10:28:0170 PID参数整定资料免费下载。
2021-06-01 10:36:1333 通过对传统BP神经网络缺点的分析,从参数选取、BP算法、激活函数、网络结构4个方面综述了其改进方法。介绍了各种方法的原理、应用背景及其在BP神经网络中的应用,同时分析了各种方法的优缺点。指出不断提高网络的训练速度、收敛性和泛化能力仍是今后的研究方向,并展望了BP神经网络的研究重点。
2021-06-01 11:28:435 DCS控制系统PID参数的整定方法.(深圳市普德新星电源技术有限公司怎么样)-该文档为DCS控制系统PID参数的整定方法.讲解资料,讲解的还不错,感兴趣的可以下载看看…………………………
2021-08-04 15:40:1846 FB58脉冲功能 自整定参数的保存(SAVE_PAR)/重载(UNDO_PAR) 表1. 自整定参数的保存与重载 MAN_ON SAVE_PAR UNDO_PAR 状态 1 1 0 将当前参数保存至
2022-10-17 10:58:102472
 电子发烧友App
电子发烧友App



 ),再将所得参数送入PID控制器,从而实现PID参数的自整定。PID参数自整定系统如图3所示。
),再将所得参数送入PID控制器,从而实现PID参数的自整定。PID参数自整定系统如图3所示。

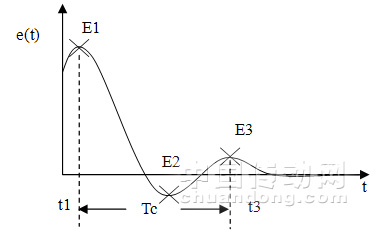
 ,原控制器对此对象的控制性能达到要求,阶跃扰动曲线如图8中线1所示。当进行PID参数自整定,整定后的响应曲线为图8中线2,把特征参量送入CMAC参数整定网络,整定后参数为
,原控制器对此对象的控制性能达到要求,阶跃扰动曲线如图8中线1所示。当进行PID参数自整定,整定后的响应曲线为图8中线2,把特征参量送入CMAC参数整定网络,整定后参数为 。从仿真图中,我们可以看出PID参数的整定效果比较理想,且CMAC神经网络的达到稳定的训练时间也比较短。
。从仿真图中,我们可以看出PID参数的整定效果比较理想,且CMAC神经网络的达到稳定的训练时间也比较短。




 工商网监
工商网监
评论