最近拆解一个寻星仪,电路不是很忙明白,这个电路的作用是检测卫星天线高频头下来的信号(也即是高频信号)的强弱,用4558放大,然后用单片机AD检测信号的强弱,4051的作用是切换放大倍数!有几点不太明白,两个高速二极管是什么作用?LM358的放大倍数怎么计算?
2016-08-25 10:33:45
本帖最后由 gk320830 于 2015-3-7 20:26 编辑
求寻线仪的直流电平检测电路,这是寻线仪上面写的功能,一直不知道这个电路怎么搭建。线路状态测试:a.线路直流电平检测及正负极性判定b.铃流信号检测c.开路或短路测试
2013-08-15 10:02:21
请问各位大神,如何用公式节点读取陀螺仪数据,陀螺仪型号是6050,谢谢!!!
2017-08-26 10:08:21
实现各种游戏操作效果。有关这点,想必用过任天堂WII的兄弟会有很深的感受。第四大用途,可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种
2020-09-03 07:29:47
元件,即可作为信号传感器。根据需要,陀螺仪器能提供准确的方位、水平、位置、速度和加速度等信号,以便驾驶员或用自动导航仪来控制飞机、舰船或航天飞机等航行体按一定的航线飞行,而在导弹、卫星运载器或空间探测
2020-09-04 07:52:53
检测到物体竖直方向的转动,但角度难判断)变化,陀螺仪通过对偏转、倾斜等动作角速度的测量,可以实现用手控制游戏主角的视野和方向。 2.可以帮助手机摄像头防抖。在我们按下快门时,陀螺仪测量出手机翻转
2018-11-08 16:14:38
操作,寻卡成功中断唤醒或定时唤醒 MCU 以实现低功耗。产品特性:Si523无需外围其他电路,Si523 的内部发送器可驱动读写器天线与 ISO/IEC 14443 A/B/MIFARE 卡和应答机
2025-08-27 09:37:50
的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路
2018-10-23 10:57:15
已经有很多大佬介绍过了MPU6050的协议、数据处理方式、滤波算法,所以这部分就不再复述了,本篇主要是针对看不懂长篇大论的小白的简易上手的方法。首先呢还是得简单介绍下什么是陀螺仪:MPU-60X0
2022-02-10 07:24:32
。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。 手机陀螺仪的作用:动作感应的GUI:通过
2012-10-19 14:51:35
本帖最后由 饼干11 于 2021-8-11 09:44 编辑
我想在一个比较大的平台,分别安装陀螺仪实现这个平台稳定,平台是三个吊轮吊着的,如何让陀螺仪判断哪个吊轮快了或者慢了,然后给单片机指令去控制吊轮,但是平台太大了会不会导致陀螺仪不灵敏,比如人在地球上感觉不到地球自转一样。
2021-08-11 08:32:28
求答:FBG解调仪的数据采集卡采集光信号和电压信号,如何通过对光信号进行拟合寻峰处理,求出所对应的波长
2019-04-29 08:47:58
MEMS陀螺仪提供了测量旋转角速度的一种简单方法,其封装很容易连接印刷电路板,因此被广泛用于许多不同类型的运动控制系统中作为反馈检测元件。在这种类型的功能中,角速度信号(MEMS陀螺仪输出)中的噪声
2017-08-12 15:38:23
` 本帖最后由 shhgkjfzyxgs 于 2016-1-22 17:32 编辑
动态陀螺寻北仪特点 - 内置三轴光纤陀螺仪和伺服加速度计,可满足高精度动态寻北- 初次上电对准后可无漂移连续
2016-01-22 17:30:08
内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);(3)附件(是指力矩马达、信号传感器等)。 三、地磁传感器与陀螺仪区别 地磁传感器与陀螺仪都可以用在导航上,各有优点。 陀螺仪是利用陀螺
2021-01-20 14:41:13
陀螺仪采集到角加速度信号,角速率信号,如何实时转换成角度值?在labview中如何实现?
2015-04-22 09:42:29
MEMS陀螺仪信号中的常见噪声源评估MEMS陀螺仪信号中常见噪声源的简单流程
2021-03-08 06:17:12
器、天线等,并已广泛用于航空和航海的导航系统及火控、雷达的万向支架支承。根据不同原理方案使用各种类型陀螺仪为元件。其中利用陀螺旋进产生的陀螺力矩抵抗干扰力矩,然后输出信号控、照相系统。 陀螺仪传感器。陀螺仪
2020-09-06 07:49:27
本文设计了一种基于FPGA的测试系统,模拟光纤陀螺仪的表头,并检测调制解调电路的性能。
2021-05-10 06:03:49
陀螺仪(角速率传感器或角速度传感器)是一种可以测量到物体角速度的装置。陀螺仪可以感知旋转运动和方向的变化。角速度不同,运动产生的电位差也不同。陀螺仪将角速度的变化转换成电信号输出。
2020-08-19 06:15:05
作为参考,最后也是陀螺仪传感器未来最有前景和应用范围的用途。那就是可以帮助手机实现很多增强现实的功能,大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有更深入的了解。 陀螺仪传感器的技术
2018-12-05 15:25:46
航向陀螺仪主要有陀螺电机、万向支架、随动托架系统、水平修正装置、信号输出装置、输电装置、减震装置、电连接器、外壳等组成。
2019-11-11 09:02:04
该陀螺仪输出信号是怎样,是否需要采集卡进行采集,若需要,对采集卡的要求是怎样。希望它最后测量的精度精度位0.001°是否能够实现。另外它是三轴的陀螺仪吗?
2019-01-15 11:36:28
`SSN57421动态陀螺寻北仪是一种自主指示方位的高精度惯性仪器,它能够任意的自主运动下,独立地测量载体的方位角、俯仰角与横滚角。在首次通电进行初始对准后可长期保持0.06°的航向测量精度,并且
2016-07-18 16:51:52
`SSN57420动态陀螺寻北仪是一种自主指示方位的高精度惯性仪器,它能够在不输入经纬度值(距离不超过5km时)的情况下,给出载体与真北方向的夹角,能动态下全天候测量载体方位角、俯仰角与横滚角。该
2016-07-12 11:25:35
本文设计了基于ARM 核的32 位微处理芯片S3C44B0X 的陀螺仪测控系统,采用μ Clinux操作系统,完成了对陀螺仪各项参数的测量、传输、显示、修改和故障报警等功能,实现了对陀螺仪
2009-05-25 16:14:35 30
30 介绍基于RISC 技术的32 位微处理器LPC2214,在寻北仪器,计算机控制模块的硬件实现。整体设计基于前后台的设计思想,本文较详细的介绍了系统的主要电路控制模块的设计方法。
2009-08-27 15:00:3714 寻北仪系统中旋转变压器/数字转换电路的设计摘要:简要介绍了旋转变压器/数字转换模块的工作原理和数据传输方法,探讨了其在寻北仪系统中与PC/104 总线的接口电路设计,
2010-02-07 16:42:2430 本文设计了基于ARM核的32位微处理芯片S3C44B0X的陀螺仪测控系统,采用 Clinux操作系统,完成了对陀螺仪各项参数的测量、传输、显示、修改和故障报警等功能,实现了对陀螺仪的监测
2010-07-20 15:44:4237 针对传统小波去噪效果的局限性,分析了平稳小波与经典小波之间的关系,首次将平稳小波用于陀螺仪信号去噪,并与经典小波的去噪结果进行比较;实验结果表明,陀螺仪信号经平稳
2010-10-15 16:11:0845 处理地震仪信号的实时信号处理仪
2008-02-25 21:10:47 1005
1005 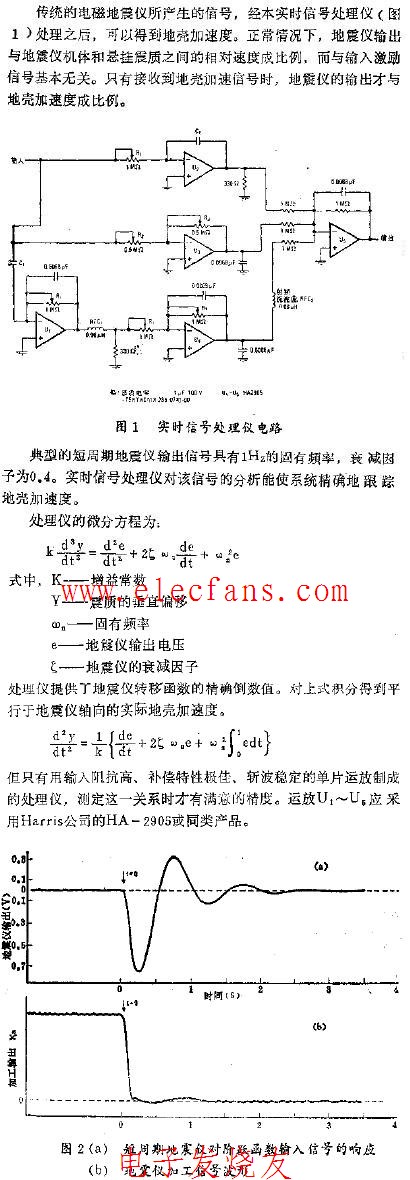
ER-MNS-05/05迷你版可OEM的MEMS寻北仪由三轴MEMS陀螺仪和三轴MEMS加速度计组成,可以测量真北。它具有 5°C
2024-12-20 09:51:29
介绍ER-MNS-06型MEMS寻北仪是世界上最小的六轴MEMS寻北仪,它由三轴MEMS陀螺仪和加速度计组成,可以测量真北。它具有体积小、重量轻、功耗低、耐恶劣环境等特点,广泛应用于矿山、隧道施工等
2024-12-23 10:38:20
介绍 随着科学技术的飞速发展,MEMS北磁罗盘在石油、矿业等领域得到越来越广泛的应用,为传统工业注入了新的活力。ER-MNS-09寻北仪是一款专为
2024-12-23 10:43:24
ER-MNS-10系列MEMS寻北仪是一款高可靠、高性价比的六轴MEMS惯性传感器组合,具有体积小、重量轻、使用寿命长、可靠性高等特点。产品外形尺寸为47
2024-12-23 10:51:18
ER-FNS-03低成本光纤陀螺寻北仪采用闭环光纤陀螺作为核心部件。它主要由惯性测量单元(IMU)、数字信号处理单元和各机械部件的机构组成。它可
2024-12-24 13:58:42
ER-2MG-01/01迷你双轴寻北MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。双轴陀螺仪的最大功能是可以提供判断物体运动状态所需
2024-12-30 13:31:42
ER-3MG-01/01迷你三轴寻北MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。三轴陀螺仪的最大功能是可以提供判断物体运动状态所需要的角速度,因此也
2024-12-30 13:45:20
ER-2MG-05 双轴寻北MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。双轴陀螺仪的最大功能是可以提供判断物体运动状态所需
2025-01-09 09:45:09
ER-2MG-07 双轴寻北MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。双轴陀螺仪的最大功能是可以提供判断物体运动状态所需
2025-01-09 11:05:41
ER-2MG-08 双轴寻北 MEMS 陀螺仪体积小、重量轻、结构简单、可靠性好。双轴陀螺仪的最大功能是可以提供判断物体运动状态所需要的角速度
2025-01-09 11:09:08
ER-2MG-09 双轴寻北MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。双轴陀螺仪的最大功能是可以提供判断物体运动状态所需
2025-01-10 08:54:30
介绍ER-MG2-022是一款单轴MEMS陀螺仪,能够测量最大±100°/s的角速度,数字输出符合SPI从模式3协议。角速率数据以24位字表示。ER-MG2-022用于北寻应用。先进的差分传感器
2025-02-27 13:55:02
°/√小时的角随机游走,专为测井工具/陀螺工具、采矿/钻井设备、无人机发射系统、卫星天线、目标跟踪系统等领域的寻北、指向和初始对准而设计。得益于其高性能,ER-MG2-5
2025-02-27 14:04:57
随着科学技术的飞速发展,MEMS北磁罗盘在石油、矿业等领域得到越来越广泛的应用,为传统工业注入了新的活力。ER-MNS-09H耐高温寻北仪是一款
2025-03-26 14:09:51
ER-FNS-01D高性能动态光纤陀螺寻北仪采用闭环光纤陀螺作为核心部件。它主要由惯性测量单元(IMU)、数字信号处理单元和各机械部件的机构组成
2025-04-23 15:22:40
ER-MNS-181高精度MEMS寻北仪,由三轴MEMS陀螺仪和三轴MEMS加速度计组成,可以测量真北。它具有高精度、高可靠性、耐恶劣环境等特点,旨在满足各种市场的应用需求。特点陀螺仪零偏不稳定性:
2025-04-25 09:55:57
ER-MNS-04A/B 快速对准寻北系统采用最新MEMS陀螺技术,突破传统定向设备的体积与性能限制,将体积压缩极致,满足集成化的作业需求,可轻松嵌入各类小型设备或复杂系统中。主要用于导弹/火箭弹
2025-06-24 16:59:58
基于ARM9和MMC212xMG的数字寻北仪设计
摘要:利用地磁进行寻北是一项重要的导航技术。本文设计了一种基于美新公司MEMS地磁传感器MMC212xMG的数字寻北仪,采用S3C2440A微处
2010-03-27 10:18:201296 
为了提高光纤陀螺输出信号的精度和实时性,提出了一种适合在数字信号处理器(DSP) 上实现的快速算法,该算法不需要传统小波变换中内插和抽取步骤,给出了相应的快速分解和快速重构实
2011-09-13 14:34:1725 三轴陀螺仪是什么 陀螺仪英文名Gyroscope,是一种用来传感和维持方向的装置设备。陀螺仪是由一个位于轴心且可旋转的轮子构成。 陀螺仪一旦开始旋转,由于轮子的角动量,陀螺仪有
2012-08-30 11:52:598978 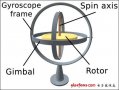
高精度测微仪激励信号发生电路的设计与实现。
2016-01-22 14:35:4212 MEMS陀螺仪CRM100的信号调理电路设计_胡陈君
2017-01-18 20:23:5815 光纤陀螺信号处理电路中FPGA与DSP的接口方法研究
2017-10-20 08:40:252 MEMS(微机电系统)技术的发展,MEMS陀螺仪的研究与发展受到了广泛的重视。MEMS陀螺仪具有体积少、重量轻、可靠性好、易于系统集成等优点,应用范围广阔。但是目前MEMS陀螺仪的精度还不是很高,要想大范围应用必须对MEMS陀螺仪的信号
2017-10-24 10:07:544 是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。 本文选用TI公司的TMS320VC33作为MEMS陀螺仪信号处理平台的核心芯片,同时引入DSP/BIOS实时操作系统提供的多任务处理机制,在对陀螺仪信号进行数据采集的间隙同时对先采集来的信号数据进行处理
2017-10-26 15:27:0510 ,而这些漂移量是非线性、非稳定的,使得测量数据中存在较大误差。 常用的陀螺仪信号降噪方法有卡尔曼滤波、短时傅里叶变换、小波变换等。其中,卡尔曼滤波是基于建立线性模型,然而线性模型对于非稳定、非线性漂移信号并不是很有
2017-11-01 09:43:544 就用现在的智能手机来研究下陀螺仪的用处,之后还会介绍清楚陀螺仪的特性,看完大家就能完全理解陀螺仪了。
2017-12-01 15:27:1612697 三轴陀螺仪也叫“微机械陀螺仪”,而“微机械陀螺仪”也可称作“MEMS陀螺仪”,即同时测定6个方向的位置,移动轨迹,加速。
2017-12-01 16:17:2316354 
寻北 过 程 自 动化 是陀螺经纬 仪 发 展 的 必 然趋 势,设 计 了 一 种 以 M S P 4 3 0 单 片机 和 电子 罗 盘 为核 心 的 自动粗 寻 北 系 统,明 显地提高粗 寻
2018-04-26 09:31:076 MEMS陀螺仪也称电子式陀螺仪,就是一块芯片。 Iphone 4上的陀螺仪就是这种,主要作用是在GPS没有信号时,通过陀螺仪的作用仍然能够继续精确导航。
2018-07-30 11:21:3514440 没有特殊要求,非常适宜在测斜仪中使用。陀螺测斜仪组成和原理测斜仪主要包括地面部分和井下部分,如图3所示,地面部分和井下部分通过测井电缆相连。地面部分 地面部分主要包括信号接收和解码电路、深度
2019-09-11 22:01:359672 光纤陀螺仪(FOGs)与常用于玩具中的旋转式陀螺仪类似,因为这两种陀螺仪都能测量物体的旋转。但这两种陀螺仪的工作机制却不同:光纤陀螺仪内部没有运动部件,而是用光进行测量。
2019-10-10 15:22:319440 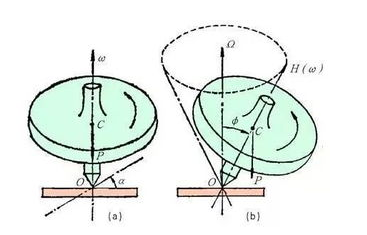
、机械转动装置和信号解算电路构成,微型陀螺寻北仪使用速率陀螺仪测量地球自转角速度,从而计算方位角。产品采集陀螺仪在不同方位角下的输出,并进行信号处理,计算出设备的方位角。 目前可携带式测向设备
2019-12-09 17:42:3120742 国外的相关研究起步较早,积累的经验比较丰富,已经形成了系列技术成熟的工业产品。目前国外最先进的摆式陀螺寻北技术主要集中在德国DMT公司研制的 GYROMAT系列陀螺经纬仪、美国利尔西格勒公司研制的MARCS陀螺经纬仪和乌克兰研制的GK-30、GK-3寻北仪等产品。
2019-11-30 10:14:369996 KE3100 xDSL检测套装 xDSL寻线仪和非接触式xDSL信号接收器,带集成的寻线仪功能。 KE3100 独一无二, 结构紧凑,性价比高! KE3100 使技术人员能够检测典型和基于IP
2020-04-03 17:23:131654 MEMS加速度计在寻北仪中的应用 高精度寻北仪是一款由高精度双轴动力调谐陀螺通过测量地球自转角速度,自主确定所附载体的真北方向值,不受外界磁场或其他环境的干扰和影响,另外它也可以结合加速度进行水平角
2020-04-16 10:46:032064 目前,在陀螺仪应用领域,按精度细分的话,陀螺仪可分为商用陀螺仪、战术陀螺仪、导航陀螺仪、战略陀螺仪。
2020-07-14 16:00:395195 非常重要而且必须面对的问题。针对闭环消偏光纤陀螺信号处理中既要实现对快速A仍采样数据进行滤波,同时又能保证光纤陀螺能够实现闭环控制以及具有一定的带宽,以光纤陀螺(FoG)信号滤波处理电路中FPGA和DSP的接口问题为例,探讨了三种不同的接口方案的设计思路、优缺点及其适用情况,考虑到光纤陀螺信号处理及其滤波
2021-02-01 11:53:2912 为了保证寻北仪的优越性能,其控制处理模块采用嵌入式系统。嵌入式系统一般应用在掌上仪器、便携式系统等设计中,具有便利灵活、功能强大、嵌入性强等特点,可以实现运算、处理、存储和控制等功能。嵌入式系统包括
2021-03-19 15:52:193949 
ER-MG-056经济型MEMS陀螺仪,ER-MG-067高性能MEMS陀螺仪,导航级ER-MG2-50/100高性能寻北MEMS陀螺仪和ER-MG2-300/400高精度导航MEMS陀螺仪是我们最畅销的产品。
2023-07-07 10:16:475628 摘要:MEMS(微机电系统)陀螺仪在惯性导航、姿态控制和运动测量等领域中具有重要应用。然而,传统MEMS陀螺仪在尺寸和性能方面存在一定的限制。本文介绍了一种基于陶瓷基板的技术芯片实现了小型化MEMS
2023-07-10 15:03:371437 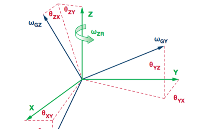
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:226373 
我公司生产的ER-MNS-05型三轴MEMS寻北仪具有不受环境干扰、测量精度高、体积小、功耗低等特点,能很好地满足上述要求。
2023-07-20 09:55:1419503 陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法。
2023-08-21 14:40:378909 北京优利威UGTP300系列A型、B型、C型、D型光纤陀螺寻北仪 UGTP系列光纤陀螺精度范围覆盖0.002 º/h~10 º/h, 均采用全数字闭环工作模式,具有
2023-08-25 09:56:582292 
因为ST选用了音叉方法设计陀螺仪,其差分特性使系统本身对作用在传感器上的无用线性加速度和杂乱振动的敏感度低于市场上现有的其它类型陀螺仪。当这些无用的信号被施加到陀螺仪,两个质点就会沿相同方向位移,在一个差分测量后,最终的电容变化将视为无效。
2023-10-08 16:49:568669 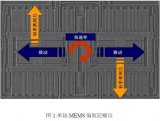
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:005988 寻北仪可以通过地球自转确定真北方向,可以为各种活动提供方位基准。它不受天气、地点和磁场环境条件的限制,具有高精度、高可靠性和易于维护的特点。
2024-12-18 14:41:291197 
在地表之下,无论是煤矿开采、隧道贯通还是地质勘探,精准的方位定向技术始终是工程安全与效率的核心保障。寻北仪凭借其高精度、强抗干扰的特性,正在这些领域发挥着不可替代的作用。以寻北仪ER-MNS-05迷你为例,我们来了解一下寻北仪是如何发挥作用的。
2025-02-06 16:51:29898 MEMS陀螺仪的寻北技术核心原理基于地球自转特性,通过测量角速度分量解算出地理北向。随着MEMS技术的不断进步,MEMS陀螺仪性能也在不断提升,已经具备了较高的测量精度和稳定性。
2025-06-04 17:50:041009 
在巷道掘进、地下钻探、卫星天线跟踪等场景中,传统寻北设备往往因体积庞大或精度不足而难以满足需求。ER-MNS-05C MEMS寻北系统突破技术瓶颈,采用最新MEMS陀螺技术,将高精度寻北功能浓缩至极
2025-06-26 18:01:09489 
自主寻北,为地下工程提供稳定可靠的方位基准。 ER-MNS-09的核心创新在于摒弃地磁场依赖,采用高精度MEMS陀螺仪直接测量地球自转角速度的水平分量,从而确定地理真北方向。 1.自主真北寻向: ◦原理: 利用高精度MEMS陀螺仪感知地球自转(约15°/小时
2025-07-03 16:44:51596 煤矿井下液压支架的精确定位是安全高效开采的核心挑战。传统定向方法常因空间狭小、强磁干扰和温度波动而失效。本文将解析ER-MNS-10A MEMS寻北仪的关键技术,如何克服这些难题,为井下设备提供可靠
2025-07-04 14:41:49422 
寻北IMU是一种无需依赖GPS或磁力计等外部参考,通过利用内置陀螺仪检测地球自转角分量,经过解算即可确定真北方向的IMU。与磁力计测量出的磁北不同,真北是固定不会改变的,是地球自转轴指向的方向。磁北
2025-07-08 15:52:34552 一、微型科技巨匠:MEMS陀螺仪揭秘 何谓MEMS? MEMS(微机电系统)是融合了微电子与微机械的神奇技术。它能在指甲盖大小的硅芯片上集成复杂的传感器、执行器和处理电路,实现微观世界的数据感知
2025-07-08 16:45:36778 2025新疆国际煤炭工业博览会的收官之日,我们的MEMS寻北仪与定向短节受到一致好评,专为复杂工业场景打造,尤其适用于煤炭井下定向掘进、钻探轨迹控制等关键环节,重新定义寻北技术标准!
2025-07-18 15:43:05487 
MEMS陀螺仪的寻北功能,其核心在于精确测量地球自转角速度的分量。通过解算这些分量,即可确定地理北向。得益于MEMS技术的持续发展,此类陀螺仪在精度与稳定性方面已实现显著跃升。
2025-07-29 18:00:47591 陀螺仪是干什么用的?陀螺仪是用来感知和测量物体旋转的一个传感器。简单来说,它可以帮助设备知道自己当前的角度和运动方向。通常,我们会在智能手机、无人机、VR设备等科技产品中看到陀螺仪的身影。我第一次
2025-08-26 17:36:131928 
最新MEMS陀螺技术的代表性产品,以其小巧体积低成本重新定义了寻北仪的应用边界。 一、MEMS技术:微型化与低成本的双重革命 MEMS技术通过将机械结构、传感器和电子电路集成于微型芯片上,实现了寻北仪技术的根本性变革。传统寻北仪依赖光纤或机械陀螺,需
2025-09-02 15:06:06465 在现代工业领域,精准的方向基准是许多应用的基础需求。尤其是在移动载体上——如掘进机等——如何在动态环境中实现快速、准确的定向和寻北,一直是一项重大技术挑战。传统的光学或机械寻北方案往往依赖静态条件
2025-09-05 14:38:18324 引言:采矿定向选型困局——高精度与实用性如何两全? 在采矿作业的复杂环境中,寻北仪是保障掘进、测绘、的“方向核心”。工程师们常陷入两难:传统光纤寻北仪精度够高,却难抵井下振动、空间受限的现实
2025-12-08 09:04:15428 在隧道、测绘、科研及设备标定等高精度定向领域,传统手段常受环境与成本制约。如今,一款全新光纤陀螺寻北仪以“超高精度”与“超低成本”的双重突破正式登场,致力于为用户提供可靠且经济的真北定向解决方案
2025-12-23 16:49:10130
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论