 电子发烧友App
电子发烧友App


1.引言
极限电流比较器是电流模式控制电路中一个非常重要的部分, 其对不同的负载情况, 产生不同的极限电流, 去限制电感上的峰值电流或平均电流, 从而尽可能地减小输出电压纹波和提高电源效率。例如:
重负载情况对应的电源输出电流比较大, 此时应设定较大极限电流, 保证输出电压稳定;轻负载情况对应的极限电流较小, 此时应设定较小极限电流, 使输出电压稳定。因此不同的负载情况对应不同的极限电流, 从而得到不同的占空比, 保证电源效率高和输出电压纹波小。
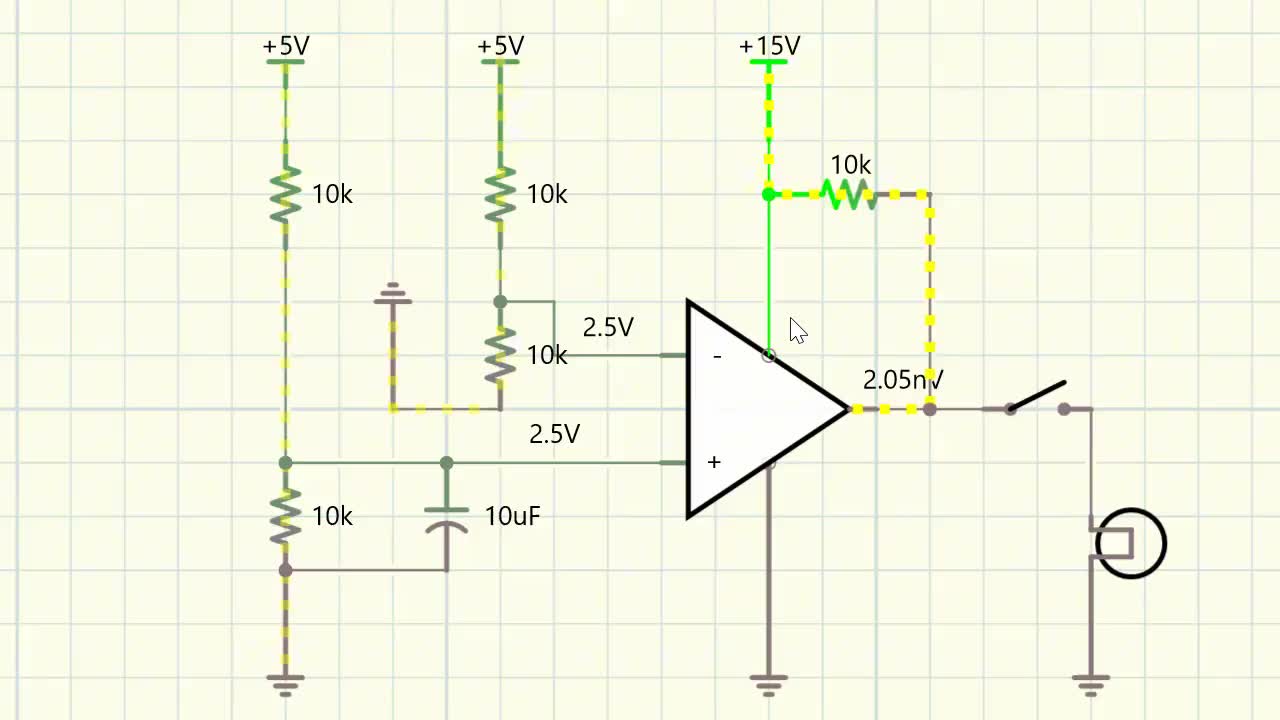
传统的开关电源控制电路中, 电流极限比较器结构如图1(a)所示, 检测电流由M1( sense MOSFET)流入由多个开关管和电阻组成的网络R1 中,该网络通过控制开关管导通或关断, 改变R1 的电阻值, 得到不同的占空比。另外一基准电流流过一阻值固定的电阻R, 产生一固定参考电压。当R1 的压降随检测电流上升到参考电压时, 比较器关断功率管, 保证输出电压稳定。其工作原理如图2(a) 所示,例如: R1 上的电压从a 上升到d, 从而关断功率管产生一占空比, 当改变R1 的电阻值, R1 上的电压从a 上升到f 得到另一占空比。从图1(a)可以看出:传统的开关电源电流极限比较器是将两种电流先转化成电压再进行比较, 需要占芯片面积非常大的电阻网络和开关管, 并且为保证电阻精度, 一般需要激光修调技术, 这大大增加了芯片成本。因此本文在此基础上提出一种新型的电流极限比较器结构。

图1 传统的与新颖的电流极限比较器结构

图2 传统的与新颖的电流极限比较器结构的工作原理
2.新结构及原理
图1(b)给出了本文所提出的电流极限比较器的基本框架, 其中Iref 为通过电流镜产生的极限电流, 其值可变。检测电流由M1( sense MOSFET)流入电流比较器, 直接与所设定的极限电流比较, 当其值上升到极限电流时, 关断功率管。通过改变极限电流的大小, 得到不同的占空比, 其工作原理如图2(b)所示。
图3 为本文所提出的新型电流极限比较器具体电路。其中M0- -M11 构成电流镜网络, 用于设定电源所需的几种极限电流值。Mc1- -Mc10 构成电流比较器, 使极限电流与检测电流直接比较产生不同的占空比(即不同的导通时间)。与非门和倒相器构成控制电路, 直接驱动功率MOS 管, 控制其导通或关断。此电流极限比较器采用电流镜结构代替传统的电阻网络产生电源所需的几种极限电流, 采用cascode结构组成电流比较器代替传统的电压比较器使两种电流直接比较。

图3 一种新型的电流极限比较器
M0 通过电流镜引入基准电流, M2,M3,M4,M5通过M1 以一定的比例产生四种大小不同的基准电流, 然后分别通过电流镜传到M7, M9, M11 及M5,四种电流以不同的组合产生电源所需的各种极限电流。检测电源输出电压的状态机通过对输出电压的检测, 产生相应的高低电平信号去设定所需的极限电流[4].此电路巧妙地用状态机的输出电压作为电流镜的电源电压, 分别接到s0,s1,s2, 直接控制电流镜导通或关断, 产生所需要的极限电流, 从而不需要占芯片面积非常大的开关管。
由于采用电流镜网络代替电阻网络, 工艺上MOS 管的匹配性远高于电阻的匹配性, 从而避免了电阻网络为保证精确度而采用的激光修调技术, 大大降低了成本。并且电流镜所占的芯片面积大大小于电阻网络所占的面积, 进一步降低成本。另外本文非常巧妙地利用状态机输出的控制信号直接作电流镜的电源, 从而使电流极限比较器不需要占版图面积非常大的开关管。例如, s0,s2 接高电平, s1 接低电平时, M9 中没有电流, M7,M8 和M5 中的电流之和Mc1 和Mc2 作为极限电流。在传统的电流极限比较器中, 为保证开关管导通电阻非常小, 其宽长比非常大, 从而占比较大的版图面积。本结构巧妙地省去开关管, 进一步减少芯片面积, 降低成本。为满足低功耗设计, 本文设定M5 中的电流作为几种极限电流的最小值, 并且始终存在电流。当功率管关断时, 控制信号s0,s1,s2 为低电平, 则电流镜网络中只有M5中存在电流, 由于其静态电流非常小, 从而保证电路低功耗。而在带电阻网络的电流极限比较器(其实为电压比较器)中, 一般需要产生大约1V 以上的参考电压, 从而开关管关断时静态电流相对比较大。M5中的电流既可以作为正常工作时的极限电流, 又可以防止由于状态机和电流镜的延时或噪声引起的误动作。
Mc3- -Mc6 组成cascode 结构作为电流比较器。
检测电流引入到Mc8, 这可采用中的结构完成。然后镜像到Mc5.当主功率管开始导通时, Mc5 和Mc6中的电流镜像检测电流缓缓上升, 只要检测电流小于此时所设定的极限电流, Mc3 和Mc4 就至少有一个工作在线性区, Mc3 和Mc4 作为一个整体呈电阻特性。因为若Mc3 和Mc4 已工作于饱和区, 则其电流一定会镜像Mc1 和Mc2 中的电流即极限电流。这就会出现Mc3 和Mc4 中的电流与Mc5 和Mc6 中的电流不等的矛盾。因此, 只有当Mc3 和Mc4 中的电流与Mc5 和Mc6 中的电流相等时, Mc3 和Mc4 才工作于饱和区。
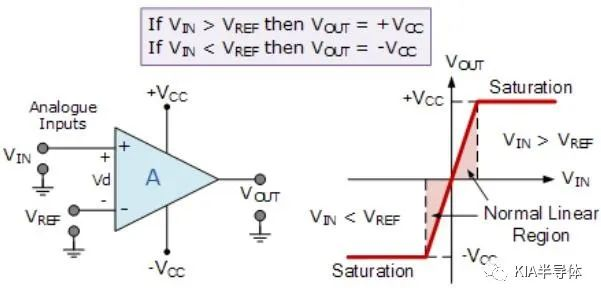
当检测电流与极限电流相等时, cascode 输出电源电压与地的平均值给反相器, 此时正好达到反相器的中转电压, 反相器开始翻转电平, 从而关断功率管。由于比较器采用cascode 结构, 其输出电阻非常大, 则只要检测电流刚上升到极限电流时, 即可马上使反相器电平翻转, 关断功率管, 具有非常高的精度。cascode 结构代替电压比较器使检测电流与极限电流直接比较, 也避免了由电压比较器的失调电压引起的不精确性。例如, 假设失调电压为20mV, 电阻网络的最小值为5kΩ, 则失调电压会引起4μA的检测电流误差, 极大地影响了系统的性能。总之,本文所提出的电流极限比较器结构无论是电流镜部分还是电流比较器部分比之相应的传统结构都具有较大的改进。
3.仿真
本文采用TSMC 0.25μm 工艺模型对图3 设定参数进行性能仿真。设最小极限电流即通过m5 中的电流为4μA, s0 所控制的极限电流为12μA, s1所控制的极限电流为20μA, s2 所控制的极限电流为36μA.
图4-图7 给出了极限电流分别为4μA,16μA, 24μA 和40μA 时电流比较器的工作情况,四种电流所对应的占空比分别为10%, 40%, 60%和100%.图4-图7 中横轴代表检测电流, 其从0 慢慢增大, 纵轴代表图3 中某些关键点的电压随检测电流变化的情况。

图4 当极限电流为4uA时电流极限比较器的特性

图5 当极限电流为16uA时电流极限比较器的特性

图6 当极限电流为24uA时电流极限比较器的特性

图7 当极限电流为40uA时电流极限比较器的特性
现以图4 为例阐述电流极限比较器的工作情况。此时极限电流为4μA, 其虚线代表cascode 结构的输出电压波形, 黑色实线代表反相器的输出电压波形即与非门的输入电压波形, 另外两条点划线分别代表cascode 结构中Mc3 和Mc4 的栅电压波形。
从虚线即cascode 结构的输出电压波形可以看出,电流极限比较器的工作过程分为五个阶段, 第一阶段: 检测电流从0 慢慢上升到A, 在此过程中, 由于检测电流远小于极限电流, 强迫Mc3 和Mc4 都工作于线性区。第二阶段: 检测电流从A 上升到B, cascode结构的输出电压也随着上升, 使Mc4 工作于饱和区, Mc3 工作于线性区。但是Mc4 只是刚刚进入饱和区, 还受沟道调制因素影响, 这可从图中很清析地看出当cascode 结构的输出电压随检测电流上升时, Mc4 中电流慢慢接近所设定的极限电流。第三阶段: 检测电流从B 上升到C, 此时检测电流已上升到所设定的极限电流, Mc3 和Mc4 都工作于饱和区, 同时cascode 结构的输出电压也上升到后面反相器的中点电压, 经过后续控制电路关断功率管。第四阶段: 检测电流从C 上升到D, 此时检测电流大于所设定的极限电流, 迫使Mc5 工作于线性区, 虽Mc6 还工作于饱和区, 但受沟道调制因素影响, 另外Mc3 和Mc4 工作于饱和区。第五阶段: 检测电流从D 继续往上升, 迫使Mc5 和Mc6 都工作于线性区,Mc3 和Mc4 工作于饱和区。从图4 中可以看出, 当检测电流达到4.1μA 时, 关断功率管, 满足系统要求。图5- - 图7 的工作情况与图4 类似, 图5 设定极限电流为16μA, 可以看出当检测电流达到15.97μA 时, 关断功率管。图6 设定极限电流为24μA, 可以看出当检测电流达到23.82μA 时, 关断功率管。图7 设定极限电流为40μA, 可以看出当检测电流达到39.6μA 时, 关断功率管。
仿真结果表明, 本文所提出的新结构能使检测电流非常精确地达到所设定的极限电流值, 满足系统的要求。但是图中显示检测电流与极限电流还是有一定的偏差(最大为0.4μA), 通过仿真分析发现这是因沟道调制因素引起电流镜镜像的误差造成的。若将电流镜的栅宽增大能进一步提高精度, 但这会一定程度上增大芯片的面积, 设计时应根据系统指标要求折中考虑。
结束
采用cascode 结构组成电流比较器代替传统的电压比较器使两种电流直接比较。此结构不需要开关管和电阻网络, 使得芯片面积大幅度降低, 减小了成本, 同时具有速度快, 功耗低, 精度高的优点。














 工商网监
工商网监
评论