3G核心网网元是什么?为什么要提高3G核心网高的可靠性设计?3G核心网高可靠性设计方法有哪些?
2021-05-25 07:04:23
苏州纳米所可靠性与失效分析中心秉承加工平台公共服务方面的特性,在对外提供支撑和服务过程中多方发现用户的共性需求,以检测能力与市场需求完美契合为目标不断完善。目前本中心在电子材料、元器件、封装、SMT
2018-06-04 16:13:50
可靠性是什么?充实一下这方面的知识 产品、系统在规定的条件下,规定的时间内,完成规定功能的能力称为可靠性。 这里的产品可以泛指任何系统、设备和元器件。产品可靠性定义的要素是三个“规定”:“规定
2015-08-04 11:04:27
可靠性是军用嵌入式系统的重要因素军用嵌入式系统的可靠性考虑
2021-04-23 06:24:35
中国电子电器可靠性工程协会 关于举办“可靠性检技术及可靠性检验职业资格取证”培训班的通知各有关单位: 根据《中华人民共和国劳动法》劳动和社会保障部《招用技术工种
2010-08-27 08:25:03
电子可靠性资料汇编内容: 降额设计规范;电子工艺设计规范;电气设备安全通用要求设计规范 ;嵌入式
2010-10-04 22:31:56
各位大爷觉得可靠性测试有没有必要做?
2016-07-07 17:25:55
可靠性管理概要7.3.1 可靠性管理的保证职能由于产品的可靠性与产品研制、生产、使用直至报废的全寿命周期的各个工作环节都有密切关系,任何环节的工作失误或考虑不周全,都会影响到产品的可靠性。通过计划
2009-05-24 16:49:57
比较实用的可靠性设计
2014-03-05 00:01:00
可靠性是我们在开展电子产品设计过程中常常绕不开的问题。例如,客户需要我们提供相关的可靠性预计报告,客户需要我们的产品提供相应的可靠性试验报告,或者企业内部需要控制产品质量,制定了一系列的可靠性工作
2017-12-08 10:47:19
当组件上板后进行一系列的可靠性验证,可靠性验证过程中产品失效时,透过板阶整合失效分析能快速将失效接口找出,宜特协助客户厘清真因后能快速改版重新验证来达到产品通过验证并如期上市。 透过板阶整合失效分析
2018-08-28 16:32:38
作者:Sandeep Bahl 最近,一位客户问我关于氮化镓(GaN)可靠性的问题:“JEDEC(电子设备工程联合委员会)似乎没把应用条件纳入到开关电源的范畴。我们将在最终产品里使用的任何GaN器件
2018-09-10 14:48:19
LabVIEW开发的测试环境要如何验证自身的可靠性呢?这个环境是用来测试汽车仪表用的,可是不能保证环境自身的可靠性,那么测试的结果也就没有意义了。请高人指点下~!!
2017-09-26 08:07:49
谁来阐述一下PCB设计中电路可靠性设计准则?
2020-01-10 15:55:08
和高性能。然而,MEMS(微機電系統)定時解決方案正迅速成為首選技術,因為它們具有最高的性能和可靠性。此外,這些MEMS定時解決方案具有獨特的功能,可解決長期的定時問題 - 隨著行業向完全連接和安全的自
2019-09-20 09:05:05
strcpy()函数标准该如何去实现呢?TCP协议如何保证可靠性呢?
2021-12-24 06:10:04
电子可靠性资料汇编内容: 降额设计规范;电子工艺设计规范;电气设备安全通用要求设计规范 ;嵌入式
2010-10-04 22:34:14
《电路可靠性案例征文》大赛主办方:硬件十万个为什么信号完整性 电子发烧友论文形式:不限参加方式:文档发送到微信号elecfans008评选标准:案例由《硬件十万个为什么》《信号完整性》《电子发烧友
2016-09-03 15:35:31
一个复杂的系统总是由许多基本元件、部件组成,如何在保证完成功能的前提下组成一个高可靠性的系统对产品设计是很有意义的。一方面需要知道组成系统的基本元器件或部件在相应使用条件下的可靠性,另一方面还要
2016-09-03 15:47:58
`PCB可靠性是指“裸板”能够满足后续PCBA装配的生产条件,并在特定的工作环境和操作条件下,在一定的时期内,可以保持正常运行功能的能力。二、可靠性如何发展成为社会焦点?50年代,在朝鲜战争期间
2020-07-03 11:09:11
` 本帖最后由 山文丰 于 2020-7-8 17:28 编辑
可靠性 = 生命线,是攸关“电子产品”及“电子企业”成败的命脉,不应小觑、更不容忽视!与其选择“低端工厂”碰运气,不如携手“高端
2020-07-08 17:10:00
` 本帖最后由 山文丰 于 2020-7-3 11:20 编辑
PCB可靠性是指“裸板”能够满足后续PCBA装配的生产条件,并在特定的工作环境和操作条件下,在一定的时期内,可以保持正常运行功能
2020-07-03 11:18:02
基于行业标准、国家标准的可靠性测试方法企业设计的可靠性测试方法
2021-03-08 07:55:20
单片机应用系统的设计包括功能性设计、可靠性设计和产品化设计。其中,功能性是基础,可靠性是保障,产品化是前途。因此,从事单片机应用系统开发工作的设计人员必须掌握可靠性设计。 一、可靠性与可靠性设计1.
2021-01-11 09:34:49
可靠性设计是单片机应甩系统设计必不可少的设计内容。本文从现代电子系统的可靠性出发,详细论述了单片机应用系统的可靠性特点。提出了芯片选择、电源设计、PCB制作、噪声失敏控制、程序失控回复等集合硬件系统
2021-02-05 07:57:48
力、汽车胎压压力等。其中机油压力传感器是用于测量汽车发动机油压力的重要传感器,其可靠性直接关系到汽车和人的安全性。本文选用MEMS压力芯片,成功开发出汽车发动机机油压力传感器,研究了机油压力传感器的封装
2019-07-16 08:00:59
高可靠性永远是计算机系统中必不可少的重要需求,尤其是对于整个系统中用来产生统一时间信号的专用设备来说,其可靠性和精准性非常重要。时统模块的功能就是保证整个系统处在统一时间的基准上,它接收时统站发来
2019-08-26 06:27:46
高可靠性系统设计包括使用容错设计方法和选择适合的组件,以满足预期环境条件并符合标准要求。本文专门探讨实现高可靠性电源的半导体解决方案,这类电源提供冗余、电路保护和远程系统管理。本文将突出显示,半导体技术的改进和新的安全功能怎样简化了设计,并提高了组件的可靠性。
2019-07-25 07:28:32
为了FPGA保证设计可靠性, 需要重点关注哪些方面?
2019-08-20 05:55:13
如何克服ACS测试系统和SMU的可靠性测试挑战?
2021-05-11 06:11:18
高可靠性系统设计包括使用容错设计方法和选择适合的组件,以满足预期环境条件并符合标准要求。本文专门探讨实现高可靠性电源的半导体解决方案,这类电源提供冗余、电路保护和远程系统管理。本文将突出显示,半导体技术的改进和新的安全功能怎样简化了设计,并提高了组件的可靠性。
2021-03-18 07:49:20
本文拟从印制板下游用户安装后质量、直接用户调试质量和产品使用质量三方面研究印制板的可靠性,从而表征出印制板加工质量的优劣并提供生产高可靠性印制板的基本途径。
2021-04-21 06:38:19
`请问如何提高PCB设计焊接的可靠性?`
2020-04-08 16:34:11
什么是微波功率晶体管?如何提高微波功率晶体管可靠性?
2021-04-06 09:46:57
PMU的原理是什么?如何提高数据采集系统的实时性与可靠性?
2021-05-12 06:45:42
`请问如何通过PCB设计提高焊接的可靠性?`
2020-03-30 16:02:37
实验室可靠性检测设备?怎样才能找到目标客户?***
2017-06-16 09:08:53
1 引言射频连接器的可靠性问题是整机或系统使用单非常关心和重视的问题。这是因为射频连接器作为一种元件应用在整机或系统中,它的可靠性直接影响或决定着整机或系统的可靠性。射频连接器的可靠性与其结构设计
2019-07-10 08:04:30
关于嵌入式等软件可靠性、安全性测试与评估的资料,希望有帮助。
2019-06-17 16:53:48
。因此,硬件可靠性设计在保证元器件可靠性的基础上,既要考虑单一控制单元的可靠性设计,更要考虑整个控制系统的可靠性设计。
2021-01-25 07:13:16
随着半导体工艺复杂度提升,可靠性要求与测试成本及时间之间的矛盾日益凸显。晶圆级可靠性(Wafer Level Reliability, WLR)技术通过直接在未封装晶圆上施加加速应力,实现快速
2025-05-07 20:34:21
提高PCB设备可靠性的技术措施:方案选择、电路设计、电路板设计、结构设计、元器件选用、制作工艺等多方面着手,具体措施如下: (1)简化方案设计。方案设计时,在确保设备满足技术、性能指标的前提下,应尽
2018-09-21 14:49:10
数字隔离器的安全可靠性
2021-01-21 07:27:02
随着科学技术的迅速发展,机电产品在国防、工业、农业、商业、科研和民用等方面的应用种类越来越多,而且都离不开电源技术和其它技术的应用。如果在其应用中忽略了可靠性管理,机电产品的质量也不会得到保证
2011-03-10 14:32:20
帮帮忙。一般汽车车灯的可靠性标准要求是怎么样的?像高温测试是测多少度多久的。像前大灯和雾灯,尾灯这类的
2014-05-05 23:27:49
0、引言电子产品的可靠性预计一直是困扰各个无线通信公司的难题之一,目前比较通用的可靠性预计方法是由贝尔实验室在2001年推出的Bellcore-SR332方法。该方法的不足之处在于它仅根据产品
2019-06-19 08:24:45
浅谈手机环境可靠性试验 本文关键字: 手机 环境可靠性 本文简要介绍了手机环境可靠性试验的目的、内容,在试验中容易出现的故障,指出了目前在手机环境可靠性测试中存在的问题。1 引言 随着社会
2009-11-13 22:31:55
深圳市华耀检测技术服务有限公司环境试验与可靠性试验虽然关系紧密,但它们在试验目的,所用环境应力数量,环境力量值选用准则,试验类型,试验时间,试验终止判据方面存在截然的不同之处。试验目的:环境试验考察
2022-01-13 14:03:37
内容: 降额设计规范;电子工艺设计规范;电气设备安全通用要求设计规范 ;嵌入式软件可靠性设计规范
2010-10-01 12:52:30
内容: 降额设计规范;电子工艺设计规范;电气设备安全通用要求设计规范 ;嵌入式软件可靠性设计规范
2010-10-01 12:54:07
内容: 降额设计规范;电子工艺设计规范;电气设备安全通用要求设计规范 ;嵌入式软件可靠性设计规范
2010-10-01 13:06:08
电子产品的可靠性试验,不看肯定后悔
2021-05-12 06:11:07
影响电源可靠性的因素。1、电压应力电源电压应力是保证电源可靠性的一个重要指标。在电源中有许多器件都有规定最大耐压值,比如:场效应管的Vds和Vgs、二极管的反向耐压、IC的最大VCC电压以及输入输出电容
2016-06-08 15:51:22
影响电源可靠性的因素。 1、电压应力 电源电压应力是保证电源可靠性的一个重要指标。在电源中有许多器件都有规定最大耐压值,比如:场效应管的Vds和Vgs、二极管的反向耐压、IC的最大VCC电压以及
2018-10-09 10:49:22
电路可靠性设计
2014-04-22 22:38:56
`电路可靠性设计与测试 [hide][/hide]`
2011-07-25 09:06:47
发现硅压阻式压力传感器系统设计和制造工艺缺陷是解决上述问题的根本。但是,MEMS器件可靠性标准的缺乏和研究人员对MEMS器件的可靠性研究不足, 限制了它的使用,以及可靠性的提高。因此, 为保证产品在
2018-11-05 15:37:57
迅速、真正提高的目的。因此,在同等期限内,应用这项技术所获得的可靠性要比传统方法高得多,更为重要的是在短时间内就可以获得早期的高可靠性,而且不像传统方法那样,需要进行长时间的可靠性增长,因此也就大大
2019-11-08 07:38:43
我想问一下高速电路设计,是不是只要做好电源完整性分析和信号完整性分析,就可以保证系统的稳定了。要想达到高的可靠性,要做好哪些工作啊?在网上找了好久,也没有找到关于硬件可靠性的书籍。有经验的望给点提示。
2015-10-23 14:47:17
急求前辈指点!硬件设计说明中的可靠性设计一般包含哪些?现在需要整理项目的一些文档,关于可靠性设计要提供哪些文档一头雾水,求前辈指点一下!不胜感激!
2016-04-22 11:11:09
缺陷成团对FPGA片内冗余容错电路可靠性的影响是什么?缺陷成团对冗余容错电路可靠性的影响是什么?
2021-04-08 06:50:18
ST官方固件库中使用了FATFS文件系统,想问下,这个文件系统可靠么?
我想了解一下,有哪位朋友真正产品上使用FATFS文件系统,可靠性有什么问题没有。
2024-05-16 06:35:00
刚刚接触PCBA可靠性,感觉和IC可靠性差异蛮大,也没有找到相应的测试标准。请问大佬们在做PCBA可靠性时是怎么做的,测试条件是根据什么设定?
2023-02-15 10:21:14
请问一下嵌入式无线系统应用中可靠性和功耗的优化方法是什么?
2021-06-03 06:11:48
嵌入式软件可靠性设计需注意什么?
2021-04-27 06:23:08
机械温控开关的可靠性有多少?我看温控开关的体积很小,价格便宜,可以用于一些温度控制方面,不过可靠性有多少呢?
2023-10-31 06:37:26
急求帮助 硬件设计说明中的可靠性设计包含哪些?现在需要整理项目的一些文档,关于可靠性设计要提供哪些文档一头雾水,求前辈指点一下!不胜感激!
2020-04-08 03:04:58
高可靠性的线路板具有什么特点?
2021-04-25 08:16:53
摘要: 由于MEMS 器件的应用日益频繁, 其可靠性研究就显得十分重要。介绍了引起可靠性问题的原因。 以微机械加速度计为例, 指出了该加速度计的可靠性问题, 以及对其可靠性测试研究
2011-03-29 15:43:50 0
0 修理的产品 repaired itemyn3中国可靠性资源网 不修理的产品 non-repaired itemyn3中国可靠性资源网 服务 serviceyn3中国可靠性资源网 规定功能 required functionyn3中国可靠性资源网 时刻 instant of t
2012-04-25 11:18:01 2372
2372 产品设计可靠性基础
2017-11-14 17:32:1621 嵌入式应用系统是一个有计算机内核,软、硬件整合的智能化电子系统。与传统的激励响应型电子系统的本质差异,是它的智力嵌入,从而形成嵌入式应用系统全新的可靠性设计观念、方法与技术。这些全新的可靠性设计观念
2017-11-30 10:04:011643 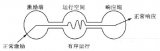
“用于智能手机中的消费级MEMS产品市场目前已是红海一片,考虑到过于追求成本,显然已经不在ADI的战略规划中。而对性能、精度和可靠性要求更高的工业MEMS传感器市场,尽管其他厂商认为其技术门槛高,需求量小,投资回报率有限,但却很对ADI的胃口。”ADI亚太区微机电产品市场与应用经理赵延辉说。
2018-06-12 09:10:001004 OXC的应用领域 光交叉互连开关(OXC)是一种NN端口的矩阵光开关,可用于构建CDC ROADM(无色、无方向性、无竞争的可重构光上/下路复用器),如图1所示。 图1. 基于WSS和OXC的CDC
2020-05-09 09:18:265757 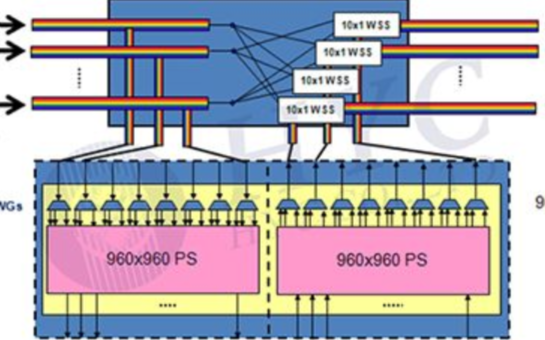
一、可靠性设计基本概念可靠性设计是根据可靠性要求进行优化设计的一个过程,其核心是可靠性分析与可靠性评估,通过产品可靠性要求的转换可获取产品可靠性设计指标,可靠性设计的目的是提高产品的固有可靠性,而制造质量控制只能使产品可靠性尽可能接近固有可靠性
2020-12-24 12:41:442711 MEMS 现场故障为零。 零现场故障令人印象深刻,但工程师希望确保零件已经过充分的可靠性测试。 衡量半导体组件可靠性的关键指标是平均无故障时间或 MTBF。 MTBF 越高,设备的预期寿命越长,因此设备越可靠。 本应用笔记描述了 SiTime MEMS 振荡器预测 MTBF 的测
2021-10-27 16:33:421035 国家电网:在就地化保护入网检测中,首次引入可靠性试验,验证产品可靠性设计水平和寿命指标。在关于新型一、二次设备(例如:电子式互感器)的科研项目中,增加了可靠性验证和寿命评估等相关研究课题。
2023-11-13 16:32:042777 
MEMS传感器具有体积小、重量轻、成本低、可靠性高等优点,可广泛应用于航空航天、导航与制导控制以及生物医疗和生物医学等相关领域。
2024-05-10 09:06:051967 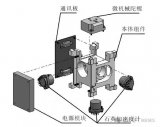
配线架MEMS-OXC,撑不起超万卡智算中心网络
2024-11-16 15:21:461070 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论