电流注入型感应电机矢量控制方案 - 基于SVPWM的感应电机控制仿真设计
2012年07月24日 16:48 来源:微计算机信息 作者:秩名 我要评论(0)
3 电流注入型感应电机矢量控制方案
3.1 电流注入型感应电机矢量控制系统
电流注入型矢量控制方案适用于中小功率、高开关频率的矢量控制系统。此时控制系统的定子参考电压完全可以由定子电流控制器提供,而无需考虑电机的定子电压方程。逆变器开关频率较高,而且电流控制器鲁棒性足够强,控制系统可以实现快速的定子电流控制,其实现方案如图3 所示。同时,这种控制技术采用空间矢量PWM 技术输出参考电压,所以它能获得很好的电流频谱。
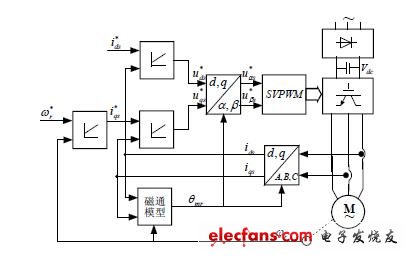
图3 间接转子磁场定向电流注入型感应电机矢量控制方案
由于电机是星形接法,无零序电流分量,所以该控制系统只需要测量电机的两相电流,第三相电流可以通过方程iCs=-iAs-iBs 求出。此外,控制系统还需要测量电机的转速,用于实现转速闭环控制和计算转子磁链位置角。控制系统总共包含转速控制器、励磁电流控制器和转矩电流控制器等三个控制器,通常情况下,这三个控制器可以是PID 控制器。
转子磁场定向坐标系下的磁通模型如下式所示,可以看出,电机的励磁电流分量imr 只与定子电流d 轴分量ids 有关,而不受定子电流q 轴分量iqs 的影响,说明在转子磁场定向坐标系下,感应电机的励磁电流分量和转矩电流分量是完全解耦的。
3.2 间接转子磁场定向电流注入型感应电机矢量控制系统仿真
利用MATLAB/SIMULINK 对本文提出的SVPWM 实现方案及间接转子磁场定向电流注入型矢量控制系统进行仿真实验,仿真时异步电动机参数为:额定功率Pe=4kW,额定电压Ue=380V,极对数np=3,额定转速ne=960r/min ,定子电阻Rs=3.21.,转子电阻Rr=3.5219.,定子自感Ls=649.4mH ,转子自感 Lr=“649”.4mH ,定转子互感 Lm=“622”.2mH, 转动惯量 J=“0”.12kgm2 。系统仿真模型参照图3 而建立。该模型中包含有三个电流控制器、一台感应电动机、电机变量测量模块、磁通模型、坐标变换模块和功率变换器模块(SVPWM 产生和逆变器模块封装在一起)等等。
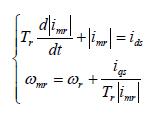
系统仿真结果如图4 所示。图4(a)所示是系统在额定负载条件下的转速阶跃响应波形。在t=1s 时刻前,系统处于静止励磁阶段,以建立额定转子磁通,如图4(b)所示。T=1s 时刻,系统转速给定由0 阶跃为80 rad/s ,该矢量控制系统的转速调节器迅速饱和,电机转速在最大转矩作用下以恒定加速度接近给定值,并在0.5s 内到达稳态,而且基本上没有稳态误差和超调。图4(c)所示为控制系统的转矩电流分量。图4(d)为定子电流A 相的电流波形。从仿真结果可以看出,该矢量控制系统的转速阶跃响应既没有超调,也没有稳态误差,而且在整个动态过程中,转子励磁电流分量基本保持不变,说明在负载扰动过程中矢量控制系统都能保持电机励磁电流分量和转矩电流分量的解耦控制,并具有良好的快速性。
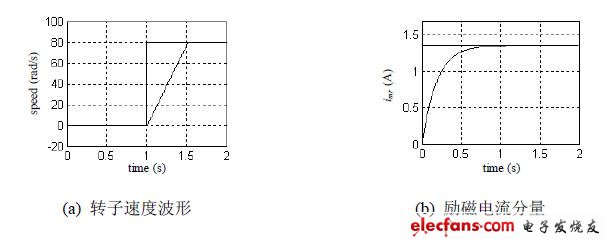
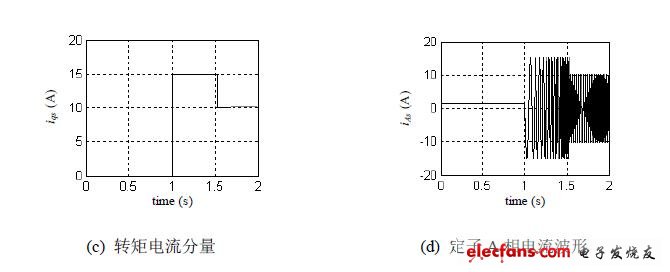
图4 仿真实验结果
4 结语
本文采用基于SVPWM 的控制技术,应用MATLAB/SIMULINK 仿真软件,建立了感应电机SVPWM 控制系统仿真模型,仿真结果表明,系统具有很好的鲁棒性和快速性,这种控制技术可以实现感应电机产生转矩的电流分量和产生磁通的电流分量之间的解耦控制,使感应电机获得与他励直流电机一致的瞬态响应特性,实现对负载扰动和参考值变化的快速响应。本文建立的模型为进一步研究变频调速系统提供了基础模型,其使用的灵活性,操作的简单性以及仿真的准确性为进行感应电机矢量控制系统的DSP 数字化设计打下了良好的基础。
本文作者创新点:提出了一种基于MATLAB/SIMULINK 空间矢量脉宽调制技术实现方式,建立了间接转子磁场定向电流注入型矢量控制系统仿真模型,仿真结果表明不但模型是正确的,而且系统具有良好的鲁棒性和快速性,为下一步该系统的DSP 数字化设计打下基础。
本文导航
- 第 1 页:基于SVPWM的感应电机控制仿真设计
- 第 2 页:电流注入型感应电机矢量控制方案
标签:


