 电子发烧友App
电子发烧友App


在20 世纪80 年代崛起的数字技术迅猛发展的光芒照耀下,模拟技术的进步,确显的蹒跚滞后。 但 现时随着科学技术的不断发展,人们对自然认识的“与时俱进”,在电子电路技术领域对模拟电子线 路的认识又重新进行了定位。
虽然今天的模拟电路的功能大部分可以用集成电路来实现,但至今仍有许多模拟电路不得不采用大 量的分离电路 或 混合电路来实现,特别是在大功率、高频、A/D、D/A 接口电路,而其中模拟电路的 难点应当首推为 微弱信号的调理电路和模数转换电路。成功的电路测控系统,要求传感器和模拟电路 有有机的阻抗匹配和能量匹配,系统要求电路平衡。
通常定义传感器是一种换能器, 严格来说, 传感器是一种接收信号或受激励 并以电信号响应的能 量转换器件。传感器将其它类型的能转换成电能,正是因为传感器有如此类型的特点, 传感器及其相关 的转换、 调理电路和模数转换电路可用来测量各种不同的物理量, 例如: 温度、力、压力、流量、 光强、物体加速度等。但是就传感器本身而言传感器不能独立工作,通常 它是和信号调理电路和各种 模拟信号电路或数字信号电路构成一个电路系统。
大多数传感器其满度输出都是相当小的微弱的信号,在进一步作模拟或数字处理之前,必须对它们 的输出进行适当的处理。据此, 便发展出了通常称之为的信号调理电路的一大类分枝电路。这类电路, 大至 分为放大、电平转换、电隔离、阻抗变换、线性变换和滤波电路等。 但是,不管采取哪种调理方 式, 调理电路的结构和性能都取决于传感器的电特性和输出。根据传感器的一种分类法,将传感器分为 有源和无源二类。一般而言,有源类传感器是指无需外部激励自身可以产生变化的电信号;无源类传感 器 则是指 需外部激励方可产生变化的电信号,且自身不能产生电信号。 激励又可分为 直流激励,交流 激励, 交直流混和激励 三种。
本文 根据上述传感器的分类,联系具体的MEMS 压阻式、MEMS 电容式传感器的应用。来谈一谈调理 电路和模数转换电路的实现的一些方法、规律。
传感器调理电路和模数转换电路的实现
1)直流激励MEMS 压力传感器调理电路和模数转换电路的实现
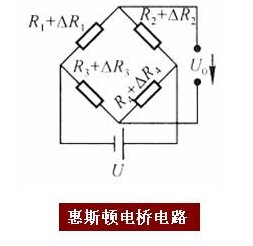
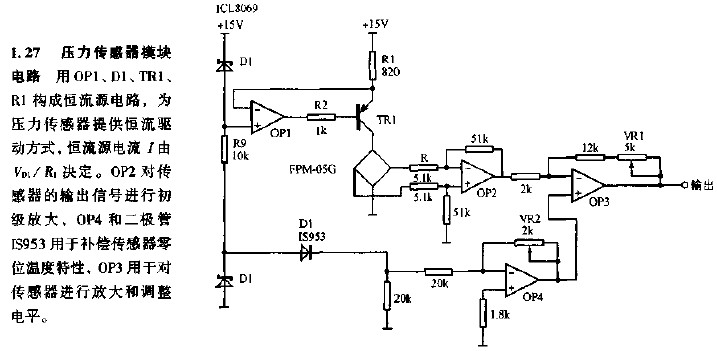
图一 是一个测量压力的电路原理图,选用的压力传感器是 目前时尚的微机械MEMS 压力传感器。 微机械MEMS 系统 传感器,是近些年来发展较快的一新科技领域,是以硅为基体,在此基础上发展 出 流量、压力、振动、角速度传感器系列等。MEMS 压力传感器采用惠斯通电桥可变电阻法, 一对惠斯 通桥臂电阻被光刻在硅悬臂梁的正反二面上, 当悬臂梁受外力胁迫变形时, 会对 这对惠斯通电桥臂电 阻产生一拉,一压的作用效果,这时,这对电桥臂电阻的阻值 就会发生变化。外力引起的变化调制成这 对电阻的阻值变化。硅 MEMS 压力传感器是一种无源传感器, 硅悬臂梁在压力作用下产生变形,从而引 起这对惠斯通桥臂电阻的阻值变化。在外加直流电压或电流的激励下,外加压力通过引起电阻的变化, 被调制成电信号的变化。
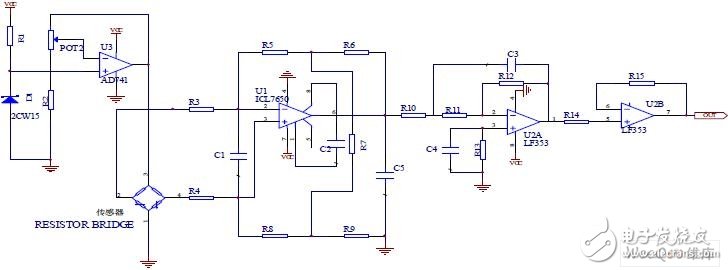
这对惠斯通电桥臂电阻采用光刻 蚀而成,一般在10K 左右。用MEMS 做成的压力传感器比应变片做成的压力传感,电阻值高,器灵敏度高,抗干扰性好,寿命长。
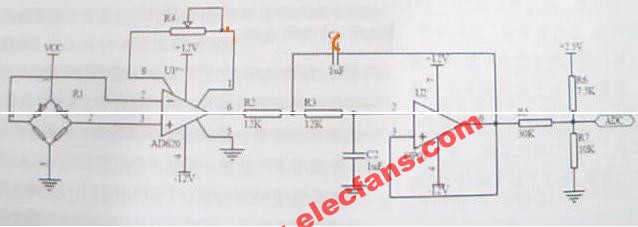
图一 是一个测量压力的电路原理图:
具体电路如图一所示,一级运 放 U1 采用增益可调平衡差动放大电路输入法,其目的是最大限度的压制共模干扰,提高系统精度。
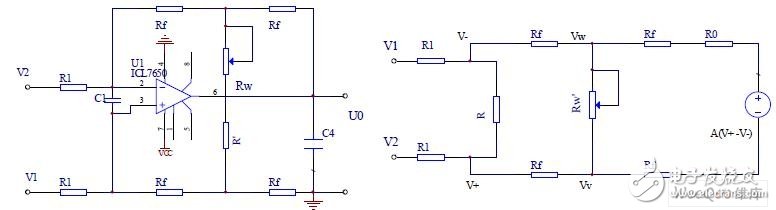
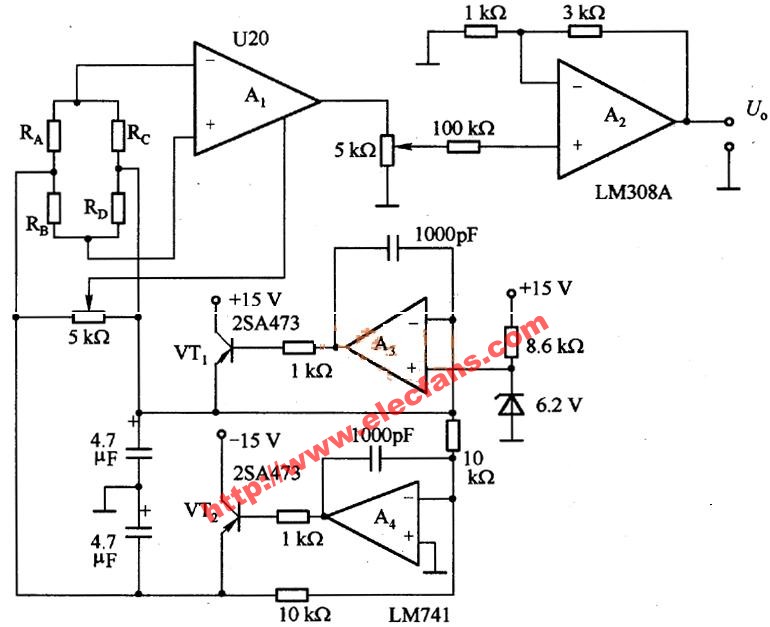
图二 增益可调平衡差动放大电路原理及等效电路图
图二是 增益可调平衡差动放大电路原理及等效电路图,其中 RW‘=RW=+R’,R0??0 据此推到出可调平衡差动放大电路输出对输入的关系,由节点方程:
第一级运 放 U1 采用的是差分输入,选用的运算放大器 是自斩波、自稳零 运算放大器 ICL7650。该放大器可同时完成调制和解调工作,因而可直接放大直流信号,且失调小,输入阻抗高。
差分信号经一级ICL7650 放大后, 将通过二阶有源低通滤波器,滤除高频杂波, 再经跟随器输出。 二阶有源低通滤波器的截止频率 200Hz。滤波器和跟随器选用的运算放大器是高精度、低漂移、运算放 大器LF353。为提高系统精度,本电路系统采用 恒流,灌电流直流激励,避免传感器电阻值变化不平衡 引入热噪声。
模拟电路使用的恒流源常有,拉电流和灌电流二种, 本电路系统采用的是灌电流 恒流法。U3 和 周围电路组成恒流源,调节电位器POT2 可以改变灌电流的大小。
2) 交 直流激励MEMS
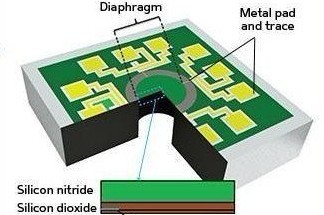
差分电容振动加速度传感器调理电路和模数转换电路的实现 加速度传感器是将运动或重力转换成电信号的传感器,一般把 加速度传感器与电信号调理电路集 成后制的成组件称为加速度计。重力加速度及匀加速度常被称为直流加速度或静态加速度,由振动等产 生的动态加速度称为交流加速度。 现流行的,科技较前沿的MEMS 器件加速度计,其传感器原理一般基于差动电容,加速度计主要由 质量弹性元件,位移测量系统及信号调理电路构成。
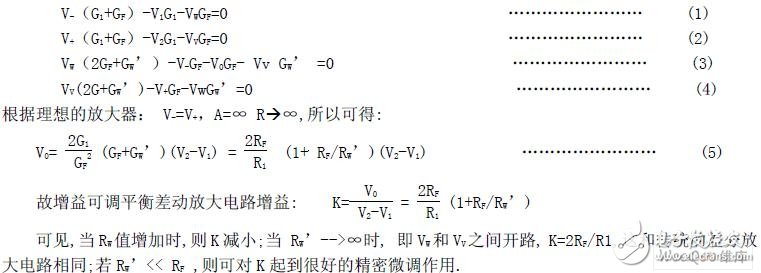
图 三 平行金属板电容器结构原理图
位移测量系统的基本工作原理常是利用电容变化的物理特性。最简单的电容器是由两平行金属板 构成,如图三所示。 电容 C=k/X0 , k 是与板间距离及金属板间物质相关的特性常数。由电容可以求出 平行金属板间距X0。一般都是在平行金属板间插入中间极板构成差分电容来测量微小距离。

结论:可以根据测量△C 知到物体的运动速度和加速度,他们具有相应的微分关系。
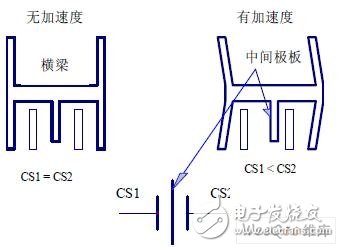
图 四 MEMS 电容式振动加速度传感器结构图:
图四, 中间极板(即横梁的伸出部分)与二个固定的外极板组成差动电容 CS1 和CS2.。没有加速度 时, CS1=CS2;产生加速度时,横梁的移动改变了中间极板和固定的外极板之间的相对位置,引起电容 变化,CS1≠CS2 。可通过一定的测量电路,将电容的变化,在外加交流电压的激励下转化为电学量,电压或电流输出,通过测量电学量就能够测得该物体相应的瞬时速度或瞬时加速度值。
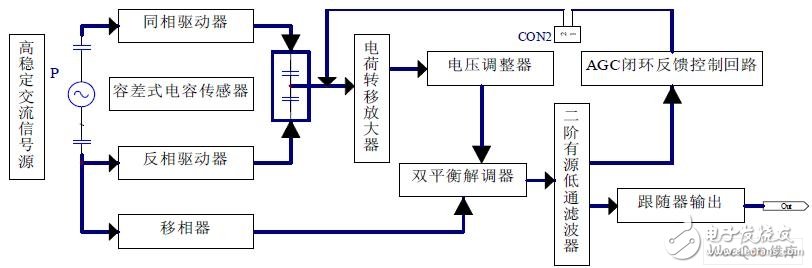
图五 交直流激励差分电容振动加速度传感器调理电路方框图:
如图五所示, 差分电容振动加速度传感器(属无源传感器)需在外加电压的作用下方能将振动信 号调制为电信号输出。由于差分电容振动加速度传感器属电容性器件,有隔直通交作用,所以不能用直 流信号作激励源,只能采取交流激励法将振动信号调制在交流激励信号之上;将调制信号适度放大,使 之有了抗杂波和分辨的能力,再经同步解调,解调出能反应振动加速度大小的电信号;电信号再经过二 阶低通滤波器,滤除高频成分;最后 信号经调整,经跟随器输出。该套电路在开环的基础上有选择地 增加了AGC 控制回路,拟增加传感器的灵敏度和带宽,压低噪声。
具体电路如图六所示:采用芯片U0( MAX038)信号发生器芯片产生 1M Hz 的正弦交流信号;U1 (AD797)运算放大器组成反相比例放大器,U2(AD797) 运算放大器组成反同相比例放大器。1M Hz 的交流信号经 U1,U2 后,变为大小相等,方向相反,及相位相差为 1800 的 二个交流激励信号,用该 交流激励信号激励差分电容传感器;U4(AD745JR)是高输入阻抗电荷转移放大器,该放大器的特点是 具有很高的输入阻抗,漏电电流极小(注:MEMS 电容传感器△C 一般只有1—4p,漏电对传感器的精度 影响很大),提高系统精度。U4 是调理电路的中心,它是将在外加激励信号的作用下,传感器振动引起 的电荷的变化转移成电压信号的变化。R12、R13、R14 采用T 型连结,目的是提升电路阻抗,提高电路 系统放大倍数。U6(AD797)运算放大器是 将C11、R16 组成的高通滤波器已去除低频干扰后的电压信 号经适当放大,为下一步同步解调作好准备;U3(AD797)运算放大器组成的移相电路,其作用是使调制 信号和解调信号同步;本传感器调理电路的同步解调器所采用的芯片为 美国 AD 公司生产的平衡解调 器U5 (AD630),所谓 平衡解调器是指:调制信号被解调出的结果只和调制信号的相位、频率有关而 和调制信号的幅值无关;经U5 同步解调出的电压信号就是反应振动加速度大小的信号;U9( OP137) 运算放大器组成二阶有源低通滤波器,电压信号经二阶低通滤波器,滤除信号中高频噪音成份;U10 ( OP177)运算放大器组成 跟随器,信号经 调整, 跟随输出。U7 (OP137) 运算放大器组成反馈 AGC 回路,将振动加速度信号的输出信号比例后反馈回源极,使动极板产生和加速度方向相反的静电力, 目的是增加加速度计的灵敏度和带宽。该套加速度计的分辨率为 2-18。
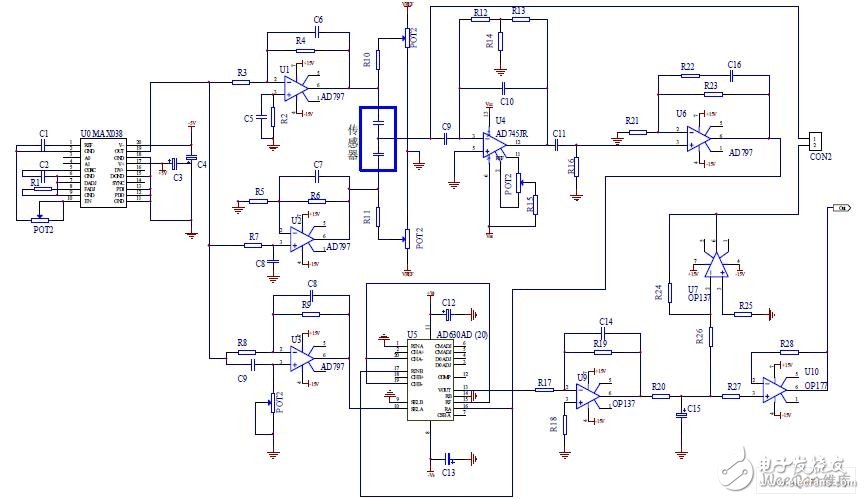
图 六 交直流激励差分电容振动加速度传感器调理电路:
(注:激励信号采用正弦交流信号而不用方波信号,是因为方波信号为离散信号没有连续性, 解调时易产生尖顶脉冲过冲杂波,该尖顶脉冲过冲杂波不易滤除,贯穿整个电路,影响电路分辨率)
本文的创新点: 传感器技术是信息社会的一大支柱,根据电容的物理特性制作的传感器在传感器家族中站有重 要的地位。提高微小电容、微小电容差分检测精度,是目前中外测控技术领域科技攻关的焦点,也是 科技发达国家共认的测控科技的置高点。
本文重点讲述了一套微小电容差分高精度检测电路,用该套电路可测物体的加速度,该套加速度计 的分辨率可达 2-18。。。 本系统电路涉及 交流驱动,前置放大、阻抗匹配,同步解调,有源滤波等。通过对二个案例的 介绍,以期待读者对交、直流驱动;何时采用交流驱,动何时采用直流驱动有所理解。以期待读者 对系统电路的前置放大、阻抗匹配;为什么要前置放大、阻抗匹配;怎样进行前置放大、阻抗匹配有 所理解。通过对微小电容差分高精度检测电路的研究,提高模拟电路的设计水平。














 工商网监
工商网监
评论