 电子发烧友App
电子发烧友App


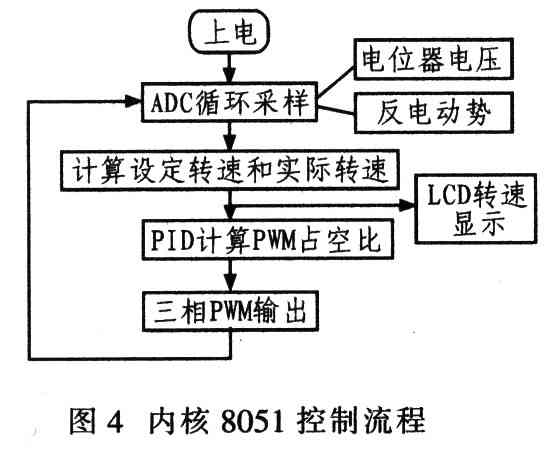
一、何谓电机?
供给电力(电压、电流)后,能够进行机械般的运动的就是电机。电机有各式各样的种类,而“BLDC电机”具有很高的效率以及良好的操作性,可以广泛用于各种用途上,并期待它所带来的低耗电量。我们按电源种类和转动原理对电机进行了分类。让我们来简单看看各类电机的特点和用途吧。
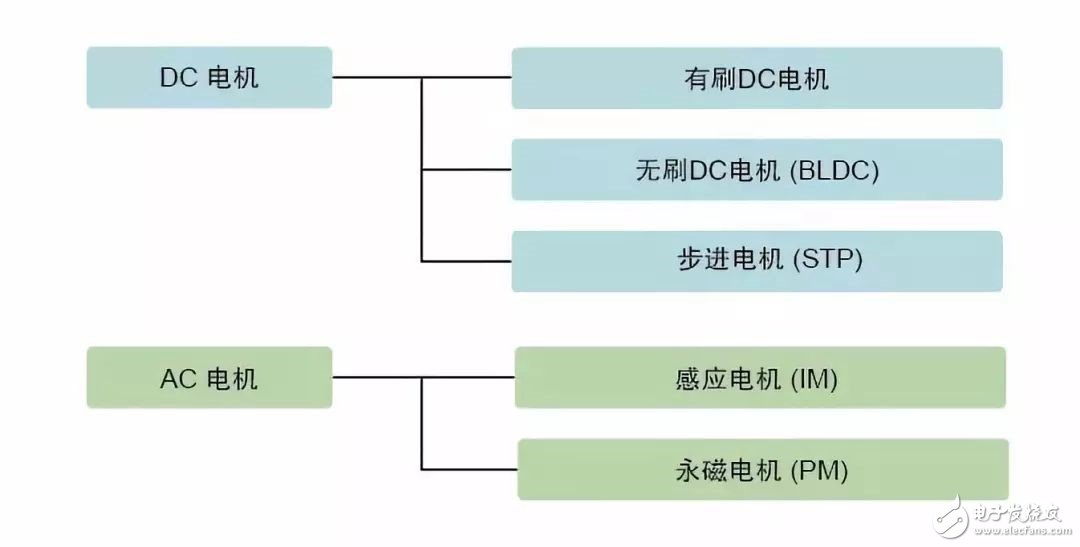
构造简单而又容易操控的DC电机(有刷电机)通常被用在家电产品的“光盘托盘的开闭”等用途上。或用在汽车的“电动后视镜的开闭、方向控制”等用途上。虽然它既廉价又能用在多个领域上,但它也有缺陷。由于换向器会和电刷接触,它的寿命很短,必须定期更换电刷或保修。
步进电机会随着向其发出的电脉冲数旋转。它的运动量取决于向其发出的电脉冲数,因此适用于位置调整。在家庭中通常被用于“传真机和打印机的送纸”等。由于传真机的送纸步骤取决于规格(刻纹、细致度),因此随着电脉冲数旋转的步进电机非常便于使用。很容易解决信号一旦停止机器就会暂时停止的问题。
旋转数随电源频率变化的同步电机被用于“微波炉的旋转桌”等用途上。电机组里有齿轮减速器,可以得到适合加热食品的旋转数。感应电机也受电源频率的影响,但频率和旋转数不一致。以前这类AC电机被用在风扇或洗衣机上。
二、BLDC电机是如何旋转的?
BLDC电机中的“BL”意为“无刷”,就是DC电机(有刷电机)中的“电刷”没有了。电刷在DC电机(有刷电机)里扮演的角色是通过换向器向转子里的线圈通电。那么没有电刷的BLDC电机是如何向转子里的线圈通电的呢?原来BLDC电动机电机采用永磁体来做转子,转子里是没有线圈的。由于转子里没有线圈,所以不需要用于通电的换向器和电刷。取而代之的是作为定子的线圈
上面是BLDC电机的运转示意图。BLDC电机的运转示意图。BLDC电机将永磁体作为转子。由于无需向转子通电,因此不需要电刷和换向器。从外部对通向线圈的电进行控制。
DC电机(有刷电机)中被固定的永磁体所制造出的磁场是不会动的,通过控制线圈(转子)在其内部产生的磁场来旋转。要通过改变电压来改变旋转数。BLDC电机的转子是永磁体,通过改变周围的线圈所产生的磁场的方向使转子旋转。通过控制通向线圈的电流方向和大小来控制转子的旋转。
三、BLDC电机的优点
BLDC电机的定子上有三个线圈,每个线圈有两根电线,电机中共有六根引出线。实际上,由于是内部接线,通常只需要三根线,但还是比先前所说的DC电机(有刷电机)要多出一根。纯靠连接电池的正负极是不会动的。至于如何运行BLDC电机将在本系列的第二回中进行说明。此次我们要关注的是BLDC电机的优点。
BLDC电机的第一个特点是“高效率”。可以控制它的回旋力(扭矩)始终保持最大值。DC电机(有刷电机)的话,旋转过程中最大扭矩只能保持一个瞬间,无法始终保持最大值。若DC电机(有刷电机)想要得到和BLDC电机一样大的扭矩,只能加大它的磁铁。这就是为什么小型BLDC电机也能发出强大力量的原因。
第二个特点是“良好的控制性”,与第一个有所关联。BLDC电机可以丝毫不差的得到你所想要的扭矩、旋转数等。BLDC电机可以精确地反馈目标旋转数、扭矩等。通过精确的控制可以抑制电机的发热和电力的消耗。若是电池驱动,则能通过周密的控制,延长驱动时间。
除此之外还有耐用,电气噪音小等特点。上述两点是无电刷所带来的优势。而DC电机(有刷电机)由于电刷和换向器之间的接触,长时间使用会有损耗。接触的部分还会产生火花。尤其是换向器的缝隙碰到电刷时会出现巨大的火花和噪音。若不希望使用过程中产生噪音,会考虑采用BLDC电机。
四、BLDC电机适用于这些方面
高效率、多样操控、寿命长的BLDC电机一般会用在哪些地方呢?往往被用于能够发挥其高效率、寿命长的特点,被连续使用的产品中。例如:家电。人们很早就开始使用洗衣机和空调了。最近电风扇中也开始采用BLDC电机,并成功促使消耗电力大幅度下降。正是因为效率高才让消耗电力下降的。
吸尘机中也采用了BLDC电机。在某个事例中,通过变更控制系统,实现了旋转数的大幅度上升。这个事例体现了BLDC电机的良好控制性。
作为重要存储介质的硬盘,其旋转部分也采用了BLDC电机。由于它是需要长时间运转的电机,因此耐用性很重要。当然,它还有极力抑制电力消耗的用途。这里的高效率也和电力的低消耗有关。
五、BLDC电机的用途还有很多
BLDC电机有望被应用在更广泛的领域中。BLDC电机将会在小型机器人,尤其是在制造以外的领域提供服务的“服务机器人”中得到广泛应用。“定位对于机器人很重要,不是应该使用随电脉冲数运行的步进电机吗?”或许会有人这么想。但是在力量控制方面,BLDC电机更合适。另外,若采用步进电机,像机器人手腕这样的构造要固定在某个位置需要提供相当大的电流。若是BLDC电机,则能配合外力只提供所需的电力,从而抑制电力的消耗。
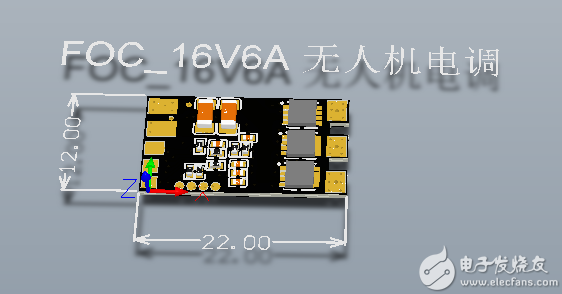
还可用于运输方面。一直以来,老年人电动车或高尔夫球车中大多采用简单的DC电机,但最近都开始采用具有良好控制性的高效率BLDC电机了。可以通过细微的控制,延长电池的持续时间。BLDC电机还适用于无人机中。尤其是多轴机架的无人机,由于它是通过改变螺旋桨的旋转数来控制飞行姿态的,因此能够精密控制旋转的BLDC电机很有优势。
怎么样?BLDC电机是效率高、控制性良好、寿命长的优质电机。但是,要想将BLDC电机的力量发挥到极致,则需要正确的控制。马达驱动电流环的设计,作为驱动器领域技术上的一个重点和难点一直困扰着很多工程师,今天让我们一起来揭开他的面纱。
对于一个马达来说,如果电流变大的话,可能造成的危害有两个:
1.电机本体本身会发热,会损坏;
因此,为了我们这样一个系统能够稳定的工作,我们就需要对电机的电流进行监控。
一般的,监控电流之后的保护措施有两种:
1.当检测到电流过大之后,我们就实行一个关断保护;
2.有的情况下,我们是不能关断保护的,比如说无人机,由于某种原因导致过流了,过流了之后如果进行关断的话,它就会摔下来,因此这个时候是不能进行关断的, 还要继续保持一定功率去工作。当然也不能过大功率去工作,这个时候就需要我们对它进行一个限功率输出,也叫恒功率输出。
那么恒功率的目的,也就是恒电流输出,也就是我们所说的“电流环”。对于一个电机来说,实际上它的“环”是有很多的,比如说有:电压环、转速环、位置环、电流环。我们这次和大家谈的主要是电流环,那么谈这个电流环的话,首先我们要和大家谈的是电机的电流如何进行一个采样。
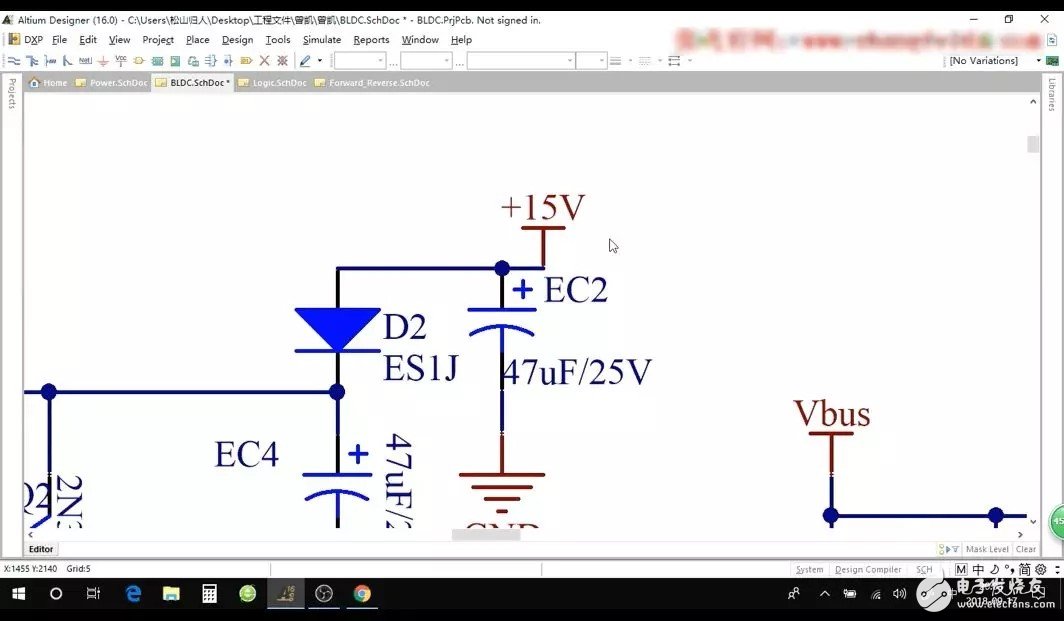
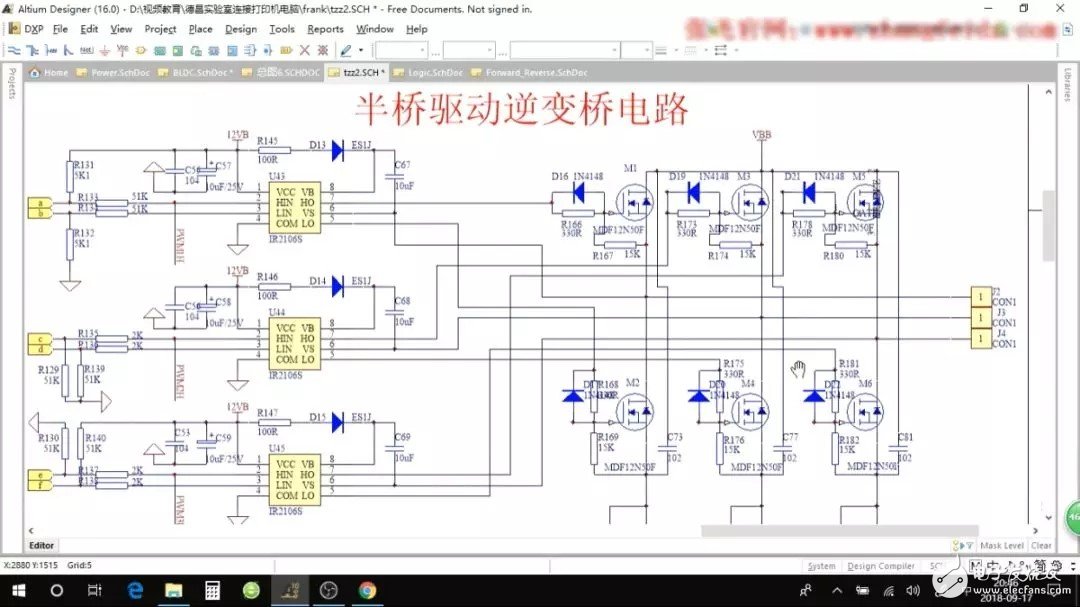
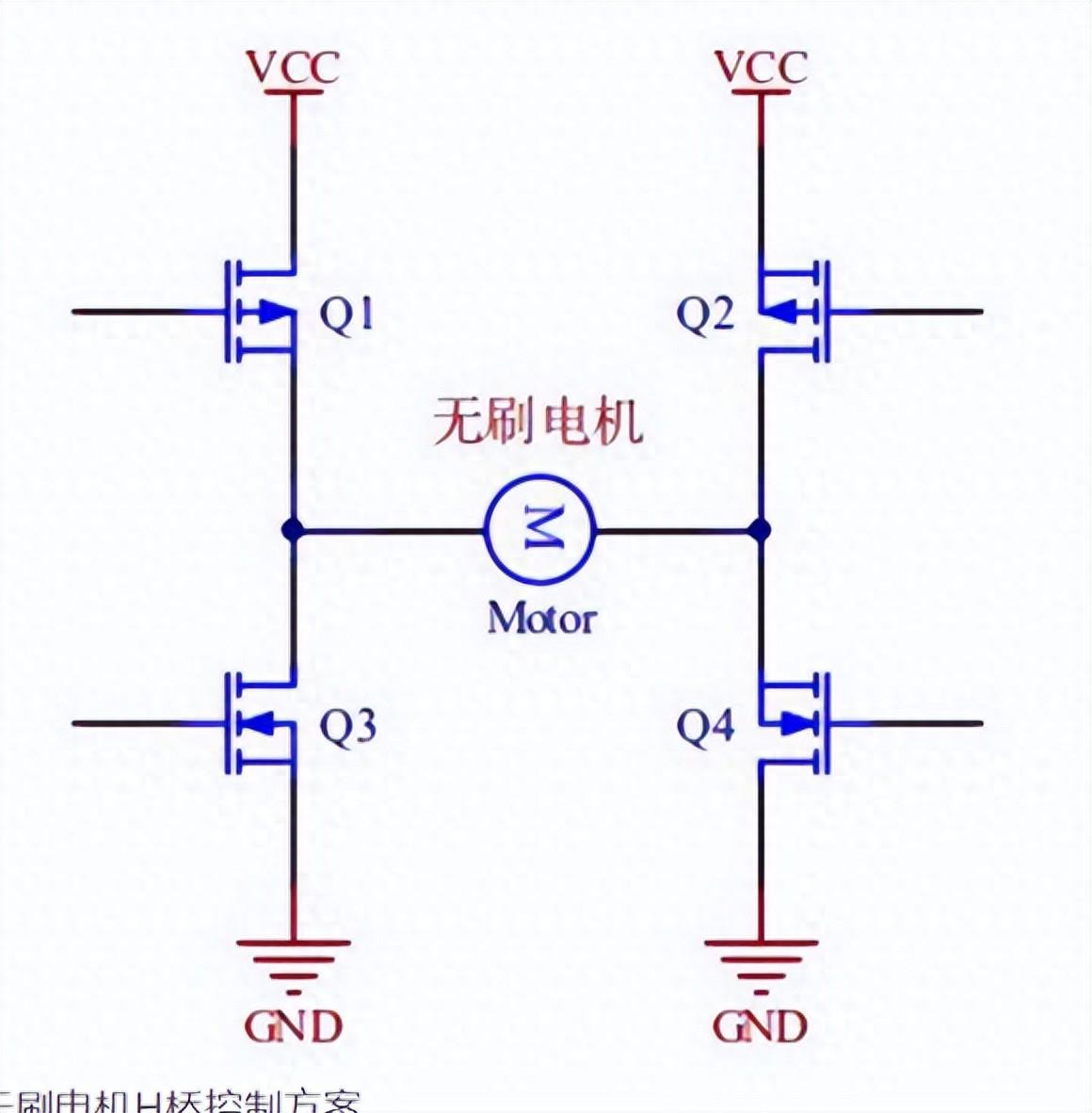
电机电流的采样一般我们分两种形式:一种方式是我们直接从电源端采样,对于电源端采样,比如说像这个桥式电路,+15V是给电池供电的电压,我们把这样的一个电压叫做Vbus电压(如下图)。
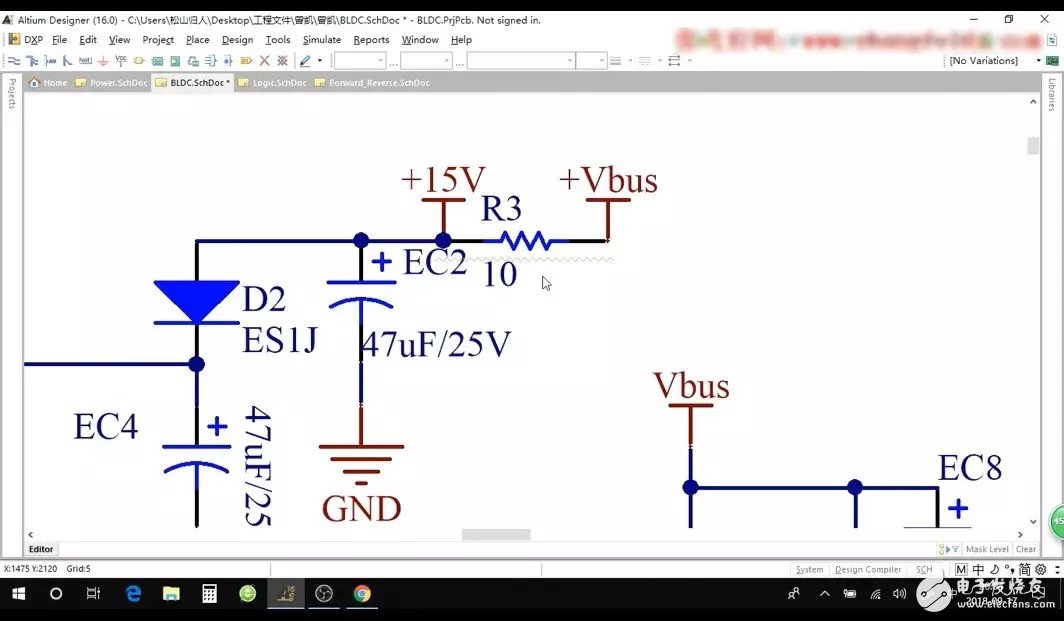
这个Vbus电压实际上是由电源供过来的,我们可以在这个电压前面,我们串接一个很小的电阻,当然了,这个电路的网络就需要改动一下(如下图),而且R3如果做采样电阻的话,所以说它的电阻的就不能大,大的话,它会影响功率的输出,比如说我们可以用一个10Ω这样的电阻。当它流过电流之后,由于它有阻值,那么它两端就有一个电势差,我们测量这个电势差,然后它的电流等效成电势差除以一个10Ω的阻值,而R3两端的电压我们就可以通过一个运放进行采集。这种方式输出来的话,采集的是一个平均电流。
如果Vbus电压是高压的话,比如说几十伏以上。而我们的运放,它的输入
电压是不可能很高的,这样的话,运放就不能直接进行采集,就需要进行分压,或者进行一个隔离,比如说用一个高速光耦进行隔离,再进行采样,这样的话,也是一个比较不错的方法,但是它的成本会比较高。
我们还有一个方法:由于R3是放在Vbus端,它是属于电源端,它的电压比较高的话,运放它的成本就比较高,这样我们可以把检流电阻放在地端(如下图)。放在地端的话,它过来的就是一个低的电压。低的电压对于一个正常的运放来说,是在它的电气参数范围之内的,所以说这样就没有什么问题了。因此,通过一个这样的方式,我们可以进行一个采样。
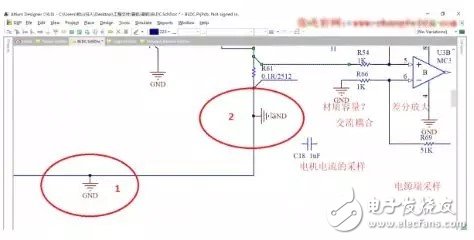
理想情况下,我们是进行差分输入的,运放的两端一定要紧挨着这个检流电阻。而不能把这个地方直接接到地上,甚至在layout的时候把这个“地”接到其他地方去了,这样的话就会把干扰采集进来(如下图)。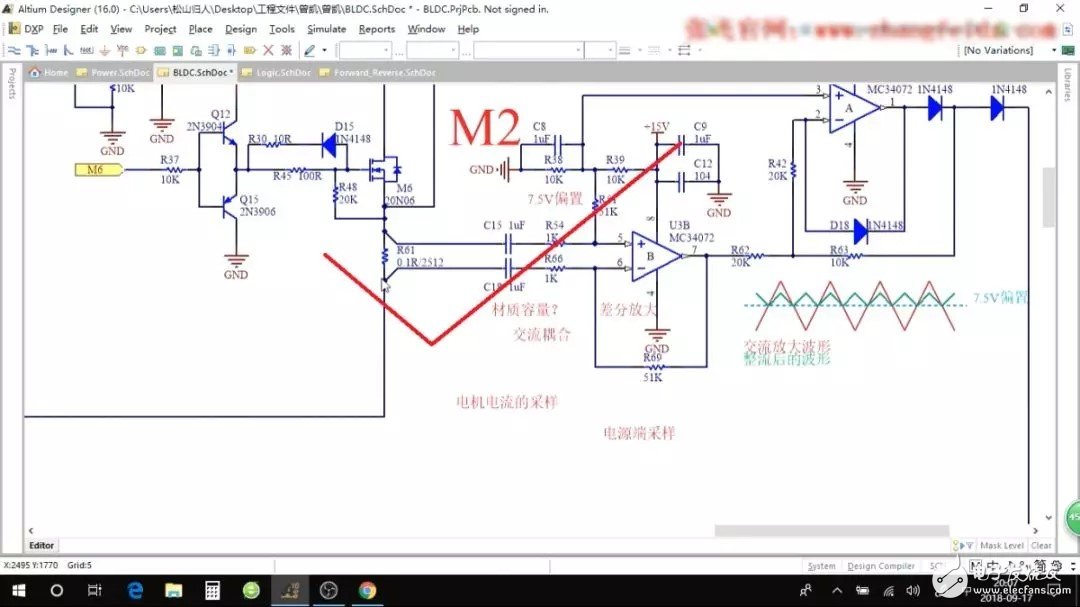
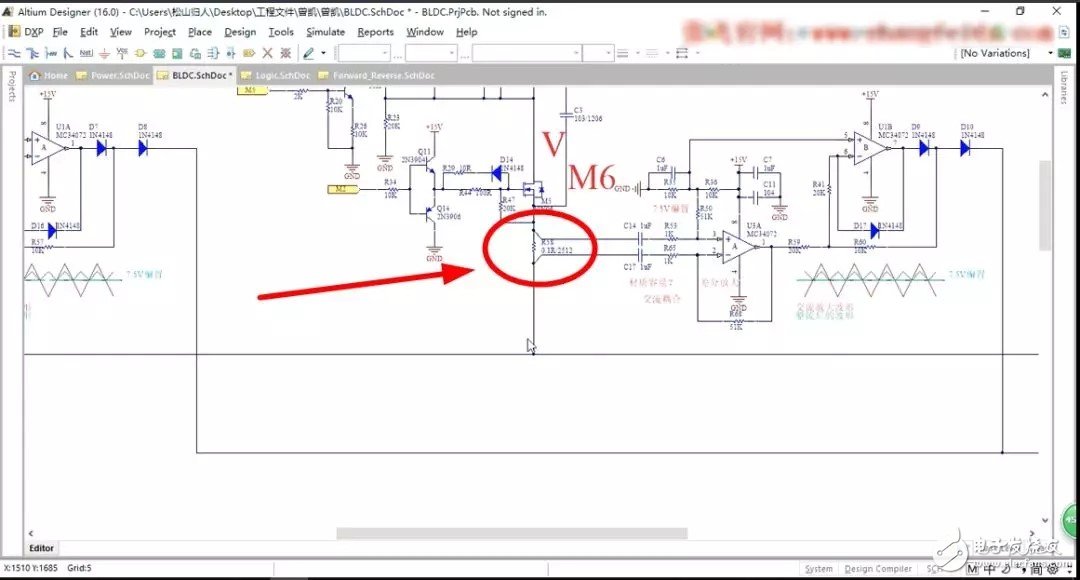
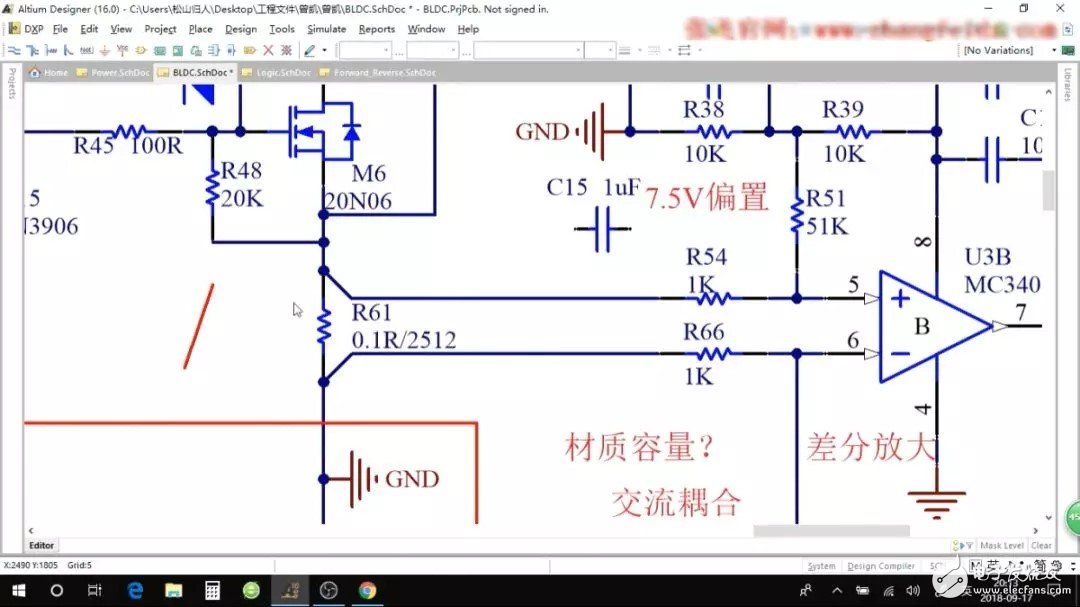
因为在布局的时候,“1”点的地和“2”点的地其实是不同的(如下图)。理论上这两点的电位是相同的,但事实上,它是不相同的。原因很简单,这个电路是接马达的相线的,电流会很大,这样的一个大电流下来的话,在到达这个地上之后,这个地上必然会发生震荡。为什么有了大电流之后,“1”点和“2”点之间的地会不一致呢?我们可以设想一下,假设这是一个广大的湖面,在湖面很平静的情况下,这两点的水位是一样高的,我们在“2”点扔一个石头的话,这样的话,水面的就会产生涟漪,由于水面在高、低不断地晃动,那么这两点就不是同样的水位了。所以,我们需要在靠近检流电阻的地方进行采集,这样的话,即使存在高低波动的话,检流电阻的两端会同时变高或变地,但是检流电阻两端的电压差是不变的,这样的话,就由通过的电流决定了。当然,由于M6是高速开关的,所以R61需要是低ESL的电阻,一般是贴片电阻,一定要是低ESL的,如果感量太大的话,由于di/dt比较大,那么就会产生感抗,R61两端电压量出来就会比较高,但是事实上电压是没有那么高的,所以说这个地方对电阻的选型是有要求的。
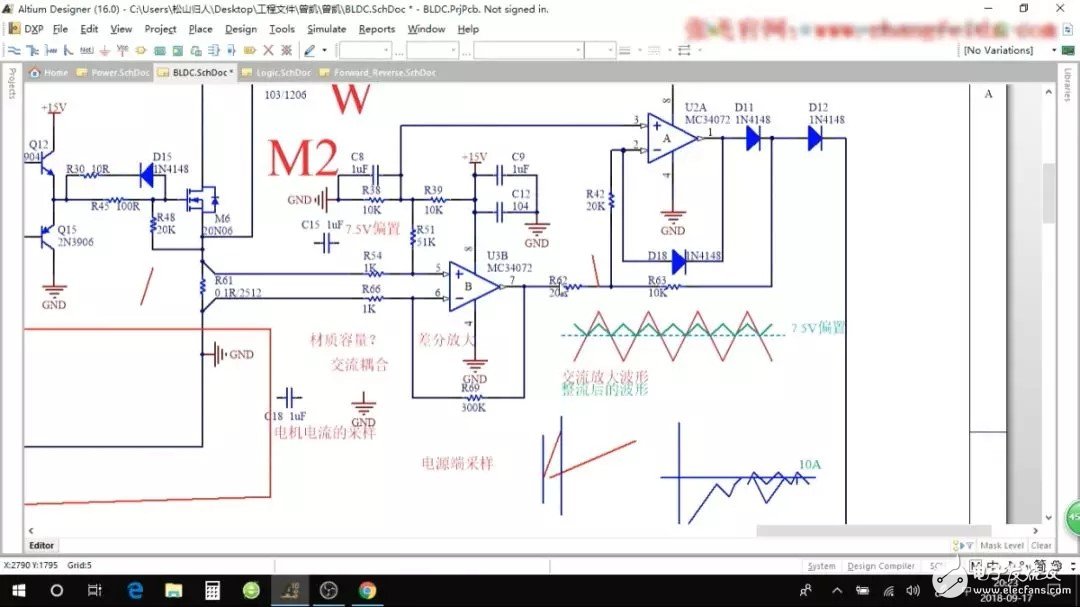
如下图,R61采集过来的电压需要进行放大,为什么需要进行放大呢?首先,第一,这个检流电阻的阻值不能太大,如果阻值太大的话,假设有30A的电流流过,如果电阻为1Ω,那么电阻的功率为:30*30*1=90W,一般没有这样的电阻,即使有,成本也很贵。
所以说这个地方需要选择小电阻,当然了,这个地方需要根据电机和电流来进行选择。最好这个电阻的功率是正常的,比如说1206、1210、1811、2510、2512,最多到2512,其实2512就已经很贵了,要一块钱以上了。
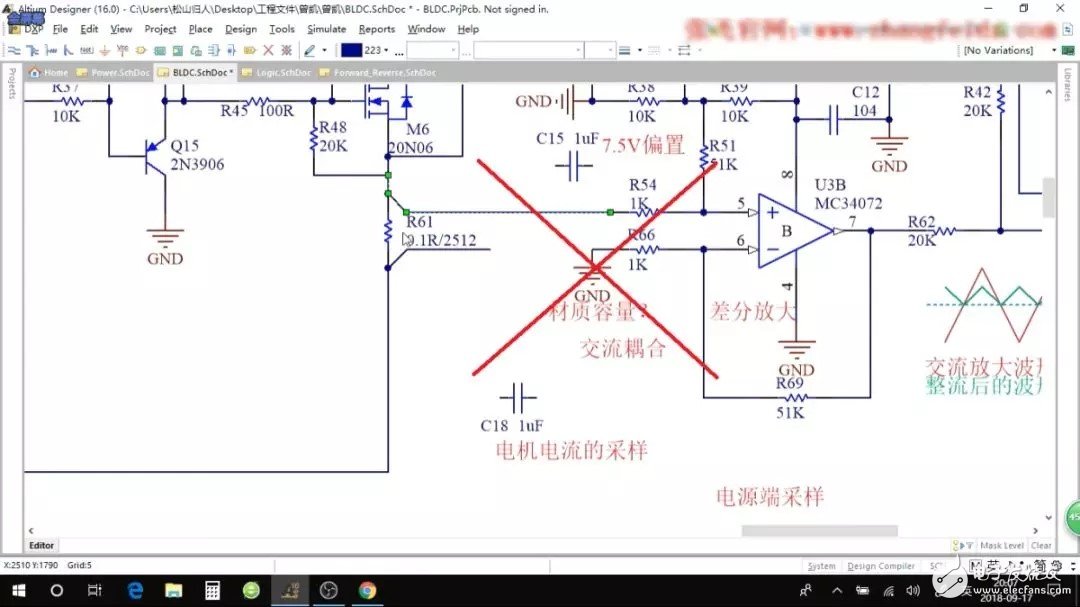
由于电阻值取值比较小,所以流过电流之后电阻两端的电压差比较小,这个时候需要我们设计一个运算放大电路来进行放大。这个时候放大多少倍呢,实际上放大了1+51K/1K=52倍,其中R51和R54是用来进行阻抗匹配的。所以我原先一直说“源”、“ 回路”、“阻抗”,这个地方阻抗的作用是比较大的,如果阻抗不一样的话,这个地方放大之后的电压是飘的,不是真正想要的值。
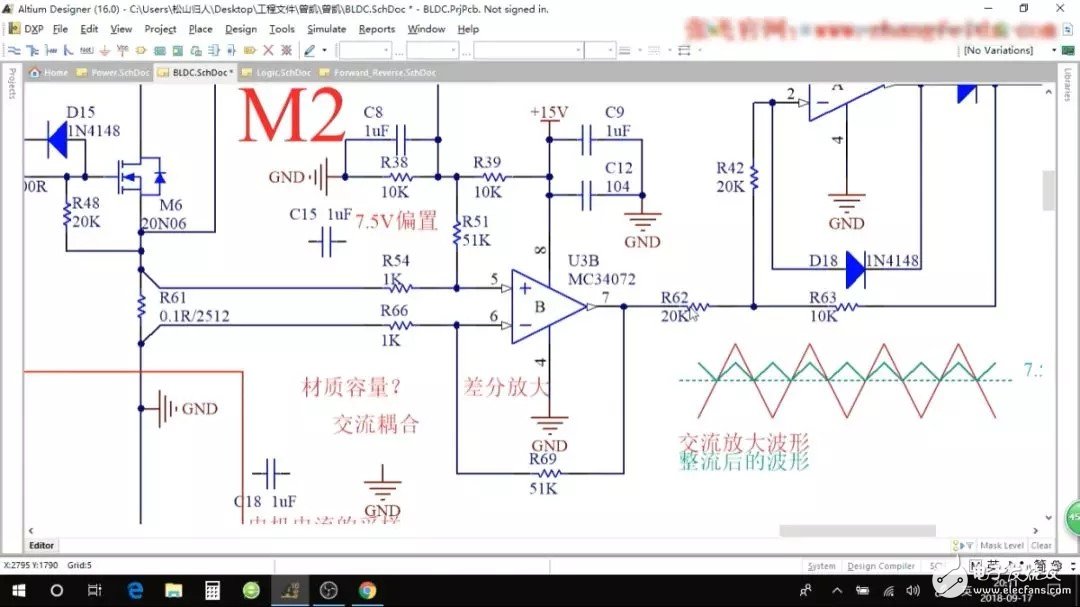
如下图所示,R61两端的电压经过简单的差分放大之后进行输出,我们对R62后面的点进行分析,这个点得到的是放大的信号,那么放大多少呢?放大的这个信号是给我们的单片机的,对应的是单片机的AD采样口,单片机的采样口一般是3.3V居多,现在5V用的已经不多了,所以说最大电流放大之后对应的电压不能超过3.3V,因为超过3.3V的话,对于AD采样来说,已经超过它的最上限值了,所以就没有意义了。这样的话,要提前算好这个电机上的最大的电流是多少,这个电阻要选好,放大后不要超过3.3V,最好不要超过3V,这样测量出来后就比较准。
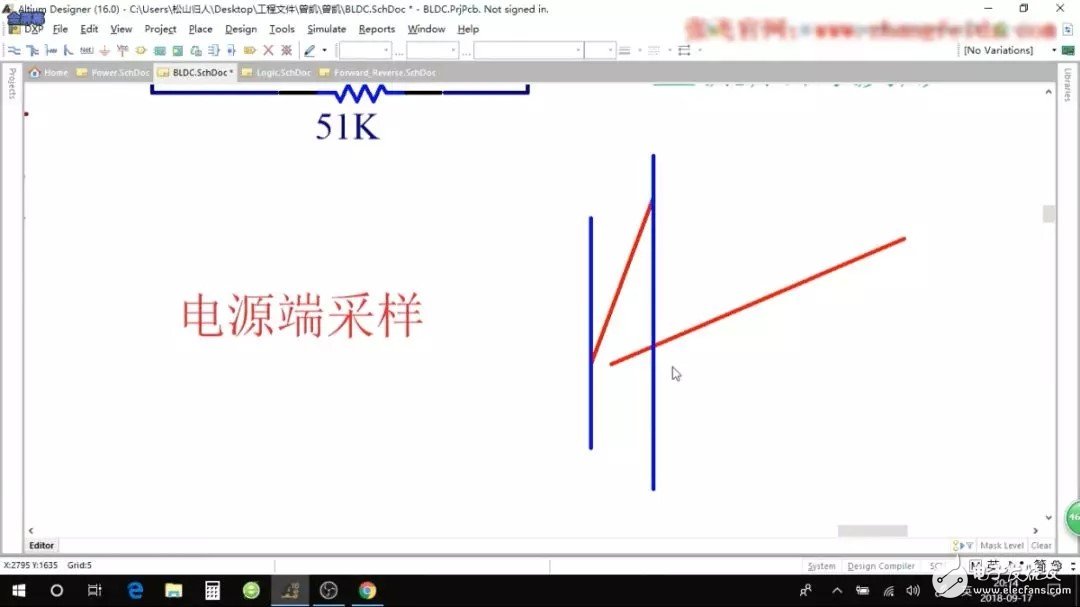
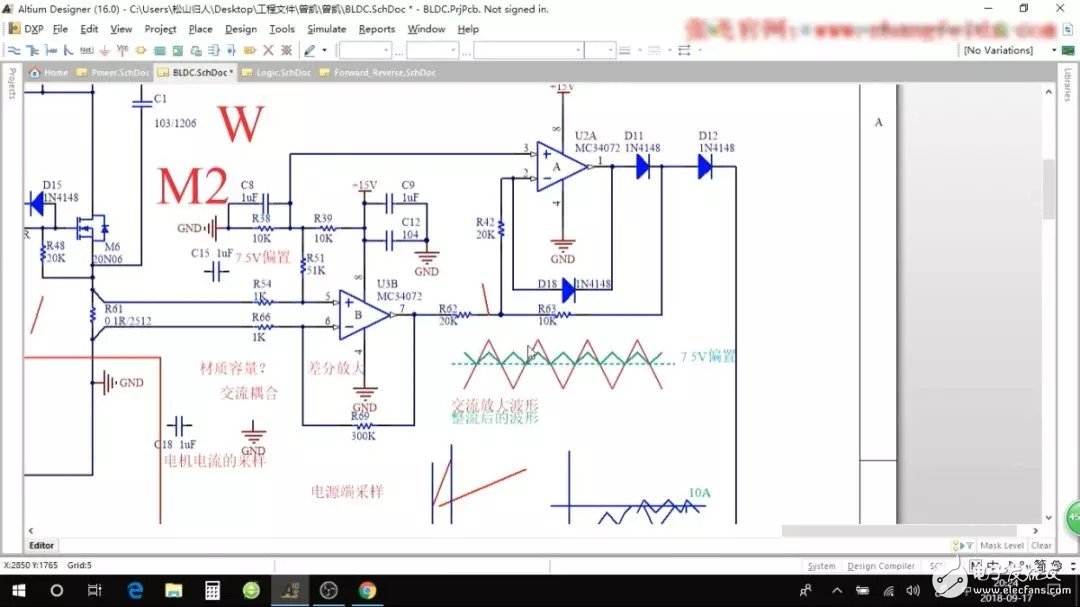
第二,我们要考虑运放,我们输入端的检流电阻R61,它的沿是比较陡的,如下图所示。
一般的运放,我们分高带宽和低带宽。如下图所示,运放的带宽比较高的话,它的输出沿是比较陡的,我们也将它称之为压摆率,如果压摆率比较小的话,它的输出是比较缓的,我们规定1s内上升的电压值为压摆率。很明显第1条红线1s内上升的电压值是比较高的,而第二条红线是比较低的。理想情况下,运放输出的斜率和前面R61上的斜率是相等的,所以运放的压摆率比较低的话,在对输入值进行采样的话,采样的值不是真正的值,而是被运放放慢了,所以我们要关注运放的压摆率问题。当然,如果你的信号是周期比较长的信号,你可以忽略,但是在马达控制的这个项目里,这个周期是不能忽略的,所以说压摆率是越高越好,这个就是我们对运放提出的要求。
在检流电阻这个地方还有一个问题:由于这里的地上会产生干扰,所以这个地方的干扰会耦合进运放里面,干扰耦合进来之后,进入运放之后就会放大,所以说测量出来的信号里面就会带有很多的干扰,这个干扰是我们不希望看到的。之前有说过,内阻越小,也就预示着电流越大,电流越大,周围的磁场也就越大,抗外在的干扰能力就越大,所以电流要偏大。运放目前有两种,一种是DMOS工艺,一种相当于是晶体管工艺。
如果前面的干扰比较大,你可以选择晶体管工艺的运放,因为晶体管工艺的运放,它的抗干扰能力要强一些,因为它有电流,属于流控流型。如果前面的干扰比较小的话,你可以选择DMOS工艺的运放,它的功耗比较低,功耗低的原因是MOSFET的内阻比较大,所以说它的抗干扰能力比较弱,这个也是运放本身我们需要注意的。
另外,运放定好了以后,我们还要注意R69的取值,我们不能取的很大,因为取的越大,电阻网络的阻值就比较大,电流就比较小,它就比较容易受到干扰,就容易把干扰耦合进来,然后会放大输出。实验证明,R69的取值最大不要超过300K,我们要求最大不要超过200K,否则在有干扰的情况下,它的输出就会带着干扰,所以不要大于200K,如果说放大一级后还是不够大怎么办,那就再加一级,甚至三级放大,也不要在一级上放大到无穷大。
经过放大之后的信号就送给MCU了,MCU根据放大后的电压值就可以判断目前的的电流是多大,一旦判断出这里的电流大了,它就要做一些保护措施,比如说关掉,这个是我们电机电流保护里面最常用的一种方法,直接把电流关掉。还有一种叫限功率,它不能关断,它只能限功率,例如之前说过的无人机。
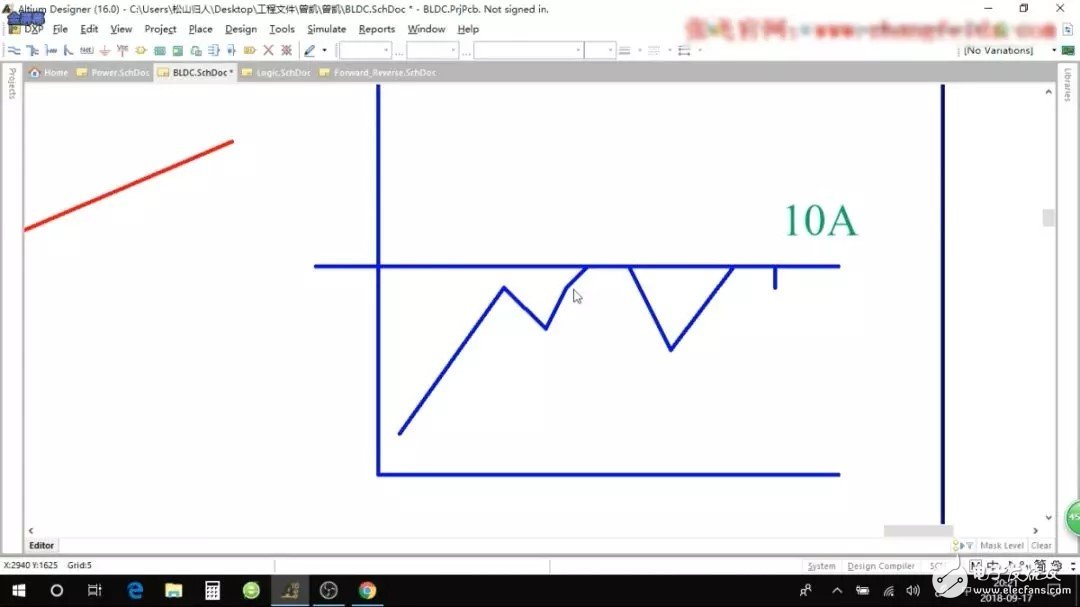
对于限功率,在这里先定义一个值,比如说10A,这个10A是限制的了,不能超过10A,如果超过10A的话,就把它关掉,低于10A,就不管,这个叫削幅。如下图,如果电流在10A以下,就不管,但是一旦超过了,就把它削平。
这种方式去做的话,我们就需要对电流实时进行采样,我们看下面,对于三个桥臂来说,只有两个MOSFET导通。
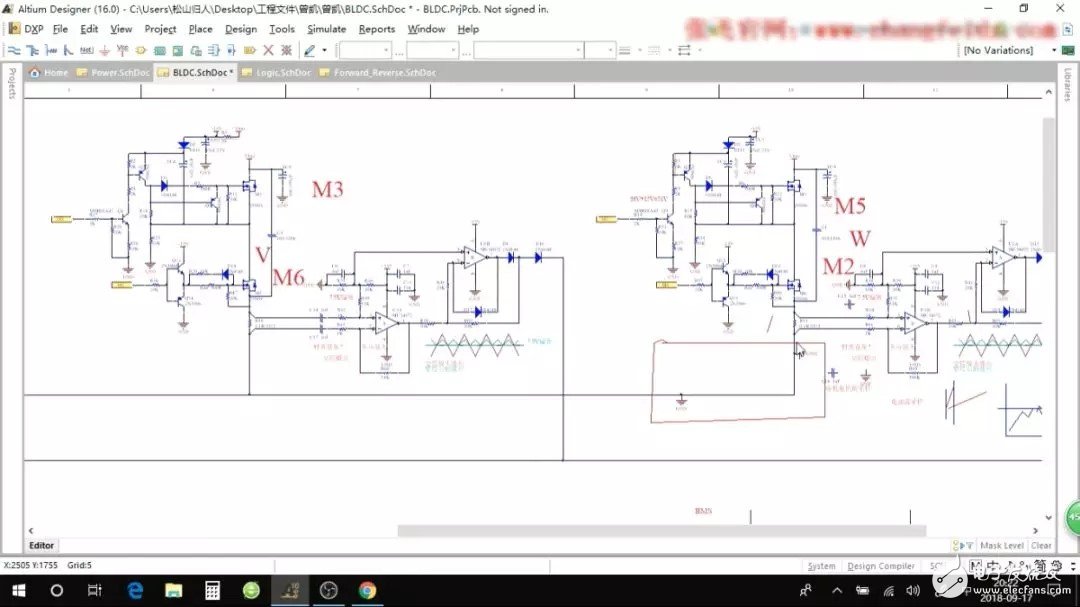
当MOSFET导通时,电阻上才会有电流流过,当管子不导通时,就没有电流流过。所以,当有时候其中一路MOSFET不导通时,就采集不到值,因此需要对其它路进行采样。采集之后,就需要对它进行处理,如下图所示,这里是用硬件的方式进行设计的,实际上,更多的人是用软件进行处理的,我们视频里也会和大家详细讲解软件怎么样去做电流环、硬件如何去搭一个电流环,那么这里是用硬件去搭的。
实际上,基本的原理很简单,在我的PFC视频的第11部至第13部已经详细讲到,就是采用电流跟踪法,比它高了,就把它削掉,类似于一个比较器一样。我们可以用一个比较器,比较器的一端是把那3路电流合并之后送过来。
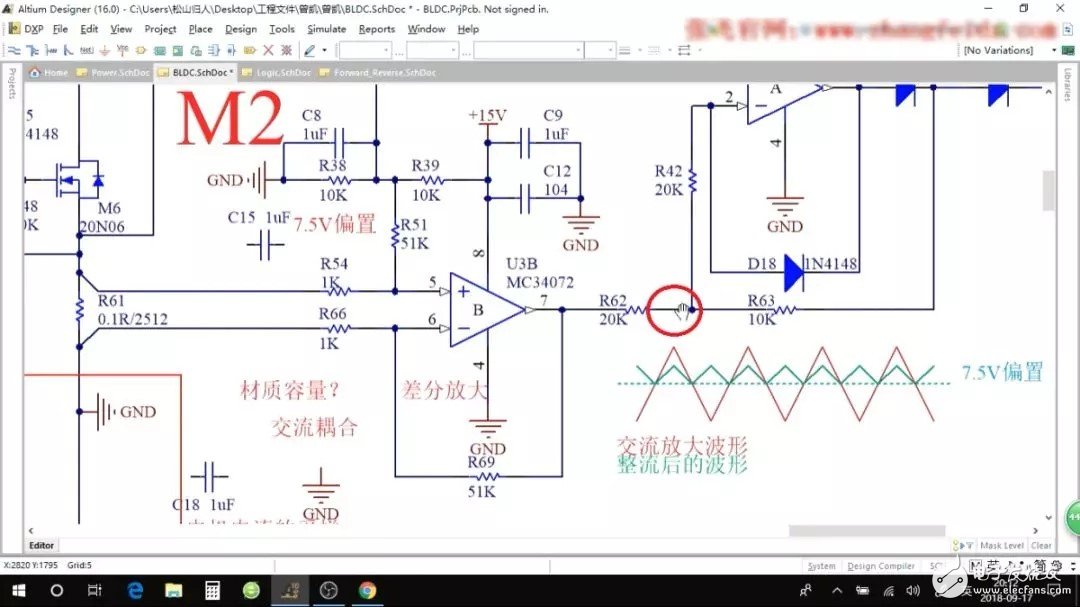
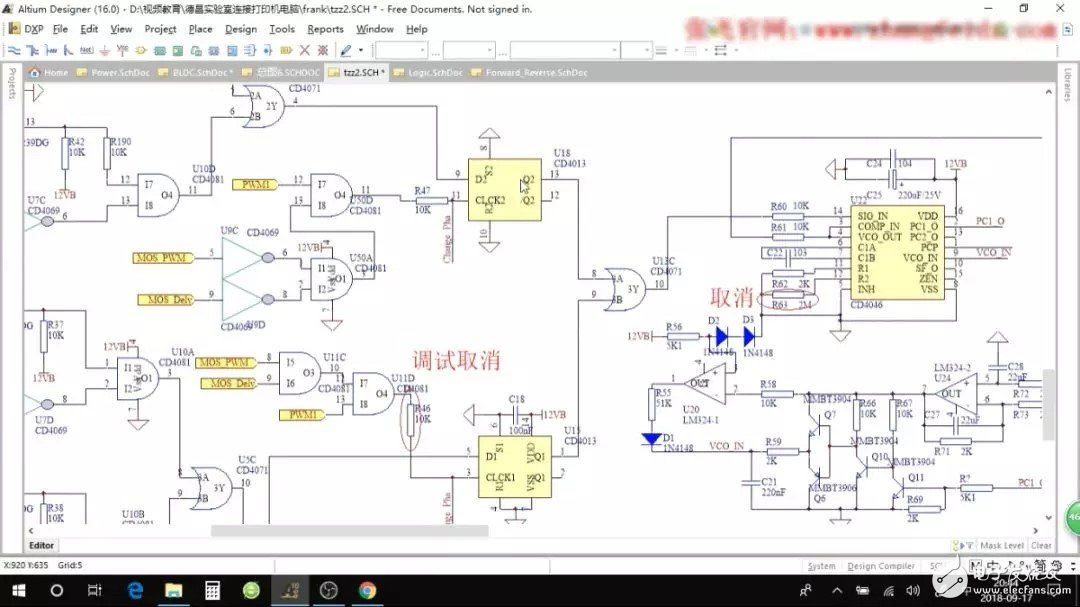
下面这幅图是整流,因为采集到的信号有些时候是正,有些时候是负,为什么会出现负呢,是因为有的时候会续流,由于电感的作用,电流会从下往上流,这个时候采集到的就是负压,对于一个运放来说,要想采集到负压,必须采用双电源供电。而我们这里是单电源供电,所以负压是采集不到的,那么该怎么做呢?我们就需要将其抬升,这里是采用偏置电阻,通过分压之后的7.5V进行抬升。
如下图所示,这里大致画一下它的意思,对于一个正常的信号来说,它只能看到0V以上的电压,0V以下的电压是看不到的。但是这里确实是有负压,而且续流过程中也有可能存在过流,那么如何将0V以下的进行处理呢?实际上将其抬升就可以,比如说原先存在0V以下的负压是被截止的,为0V,但是经过7.5V的抬升后,相对于7.5V来看为负压,但是相对于0V坐标轴来看,电压是正压,这样的话,负压也可以被采集进来。
抬升电压的好处是什么呢?可以方便的使用单电源供电的运放,因为现在单电源供电的运放是比较多的,双电源只在过去用的比较多。采用双电源运放是一个比较麻烦的事,因为需要去做负压电源,这样电路比较复杂,成本也比较高,所以说我们采用单电源这样的方案去做。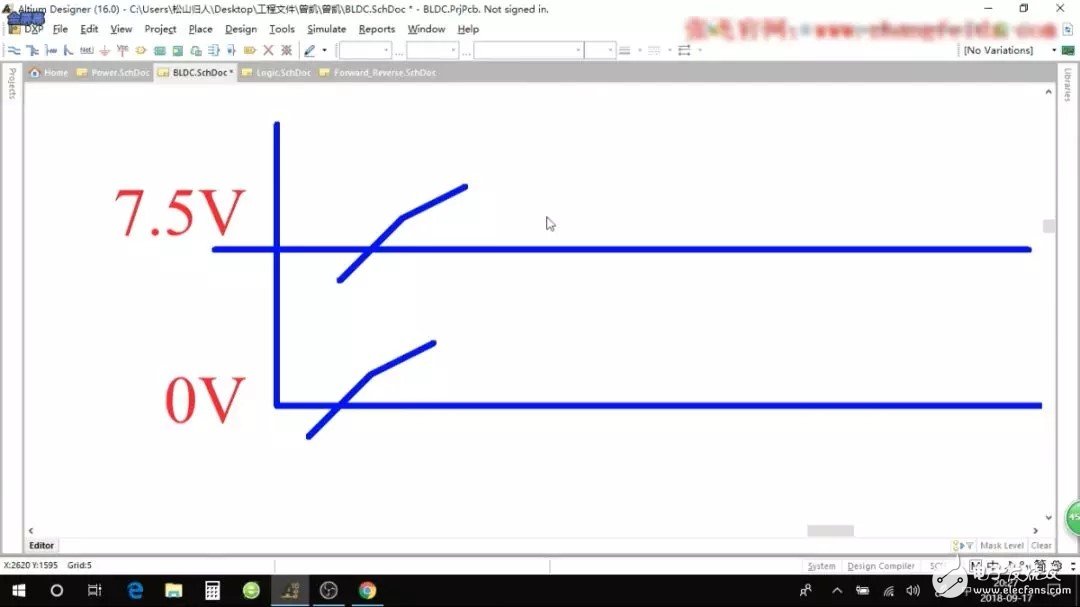
这样整流后的波形如下图,这样比较后的电压就可以进行处理了,用它进行比较,当它大于某个电压值的时候,就关闭,当它小于某个电压的时候,就不管。
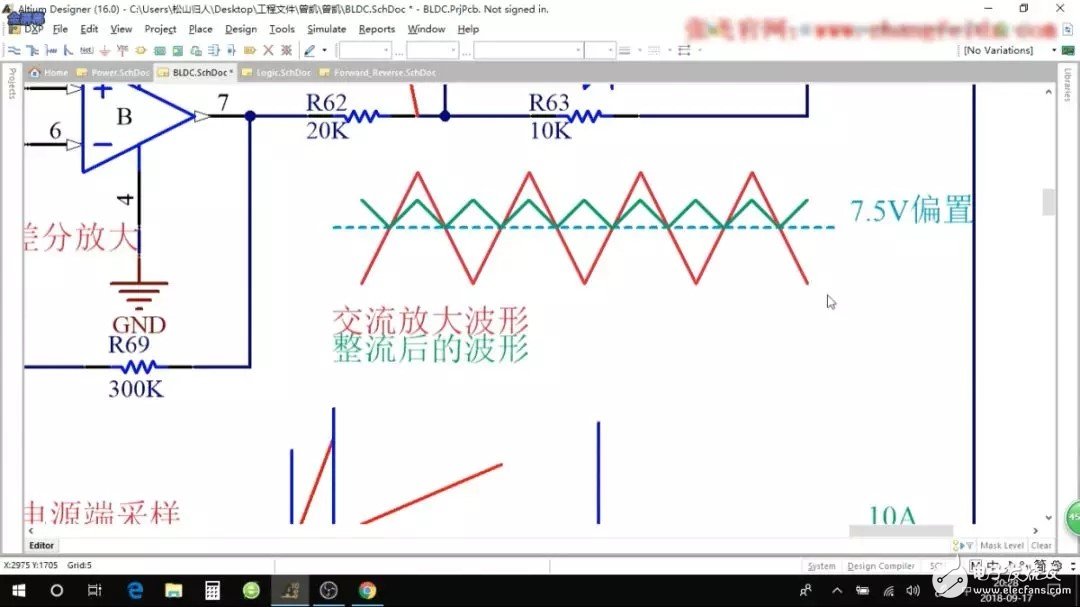
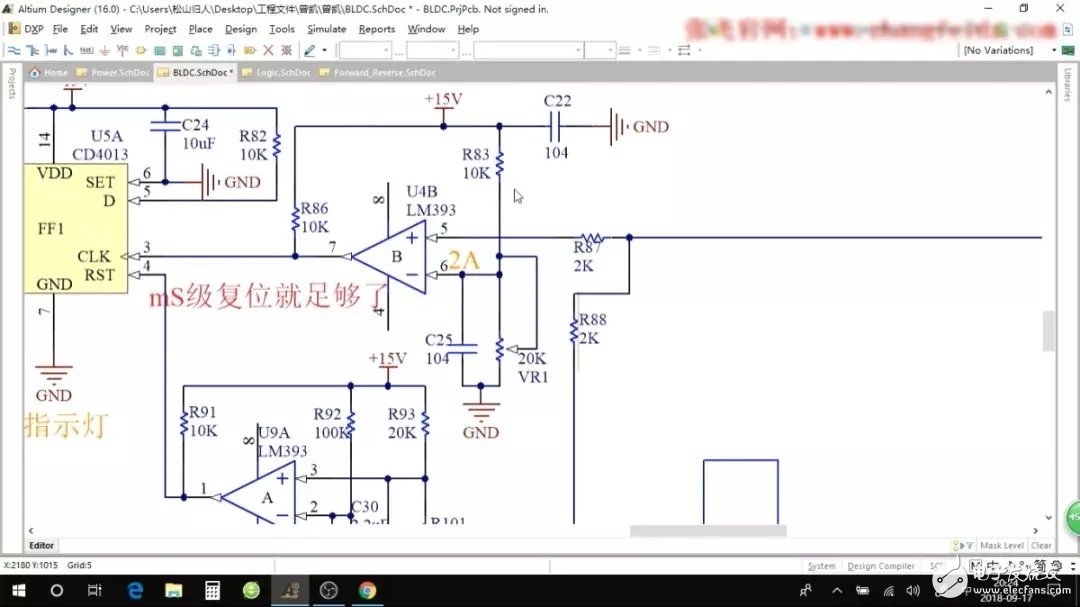
如下图,合成之后的电压送到比较器的“+”端,这个电压反应的就是电流,这里是采用硬件电路来做的。刚才提到的为7.5V,具体情况需要自己来确定。假设现在限制的为2A,其中VR1和R83分压后的电压值等效为2A,那么合成之后的电压就和等效成2A的电压进行比较,如果它超过2A,那么比较器就输出为高,否则输出为低。那么输出高或者低时,如何进行一个电流的控制呢?
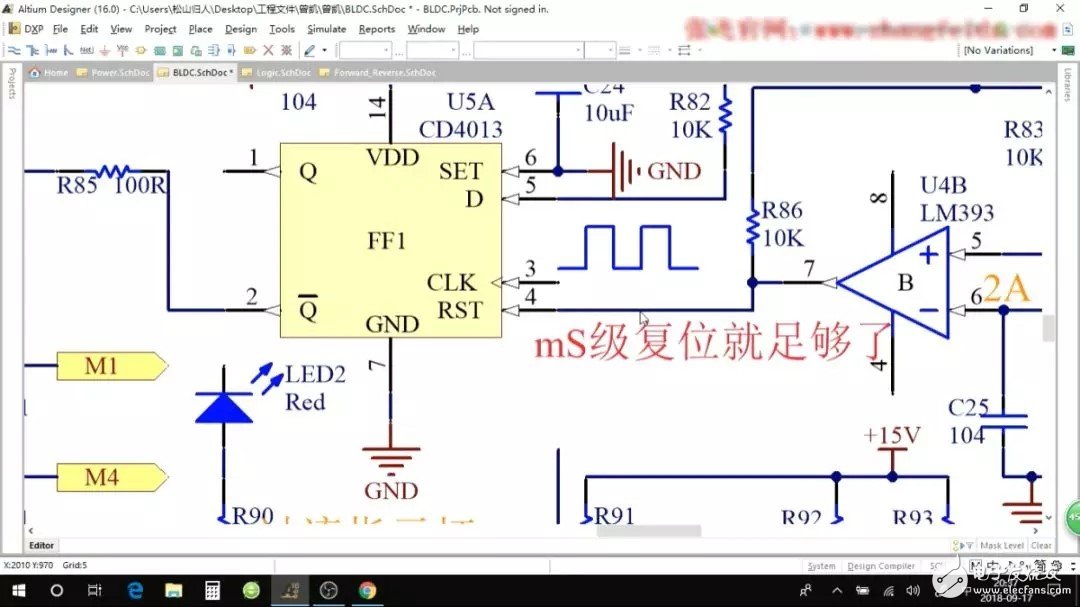
对于电机的电流的控制,实际上是用PWM来进行调速的,也就是PWM的占空比宽了或者窄了来反应速度的高和低。这样的话,我们分成前一个周期和下一个周期来看,如果前一个周期开的时间小了(占空比小),反应的电流也就小了,电流小的话,我们不管,但如果做电流精确控制的话,电流小的话,我们是需要管的,在下一个周期将占空比调大些,就是实时监控电流,但是我们这里关注的是“高”,如果上一个周期的电流超过了我的设定值,那么我们就将它关掉,等到下一个周期到来时,我们再做一次电流判断。
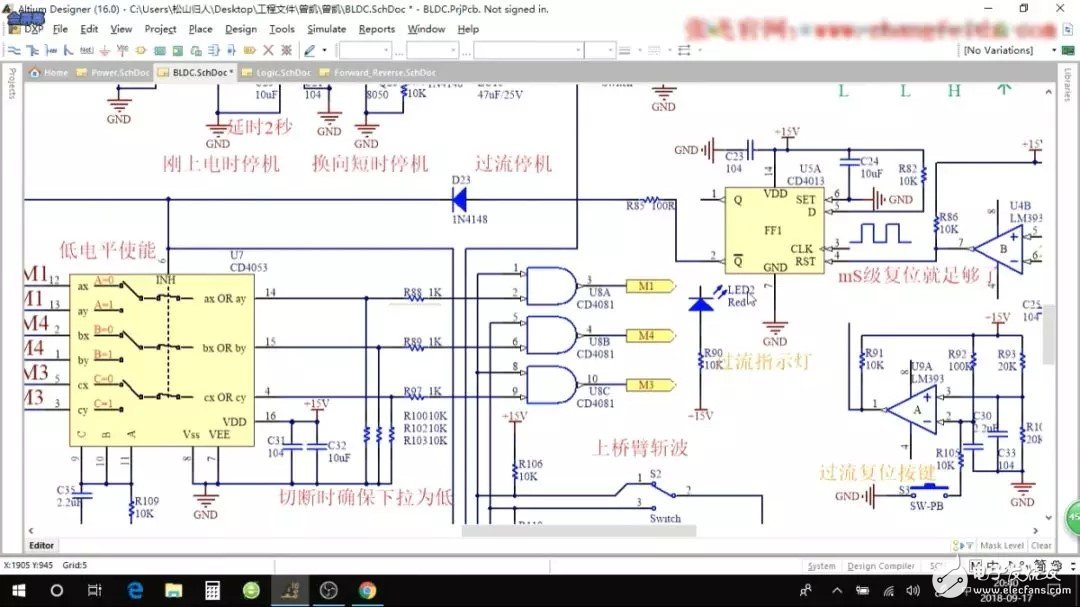
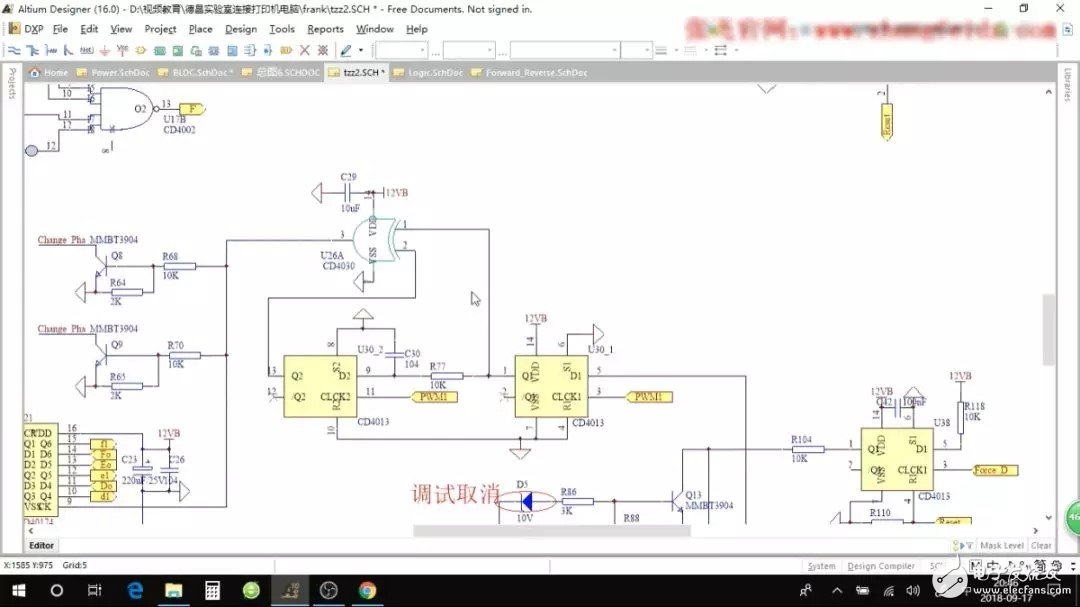
如果判断电流低了,没有超过的话,我们再继续去开通,但是如果判断电流依旧是超过的话,那么我就继续关断,也就是通过丢占空比的方式来实现。那么对于比较器的电路就比较容易理解了,通过比较器U4将采集到的电流(实际上是电压)和设定的电流(实际上是电压)进行比较,如果比它大,那么比较器输出高,对于CD4013来说,CLK为上升沿,把D处的电压送到Q端并进行锁存,而此时D端通过上拉电阻到+15V,所以Q端为高,当Q端为高时,通过MOS管的驱动电路将MOS管关断,电流就会下降,采用这种方式进行保护。
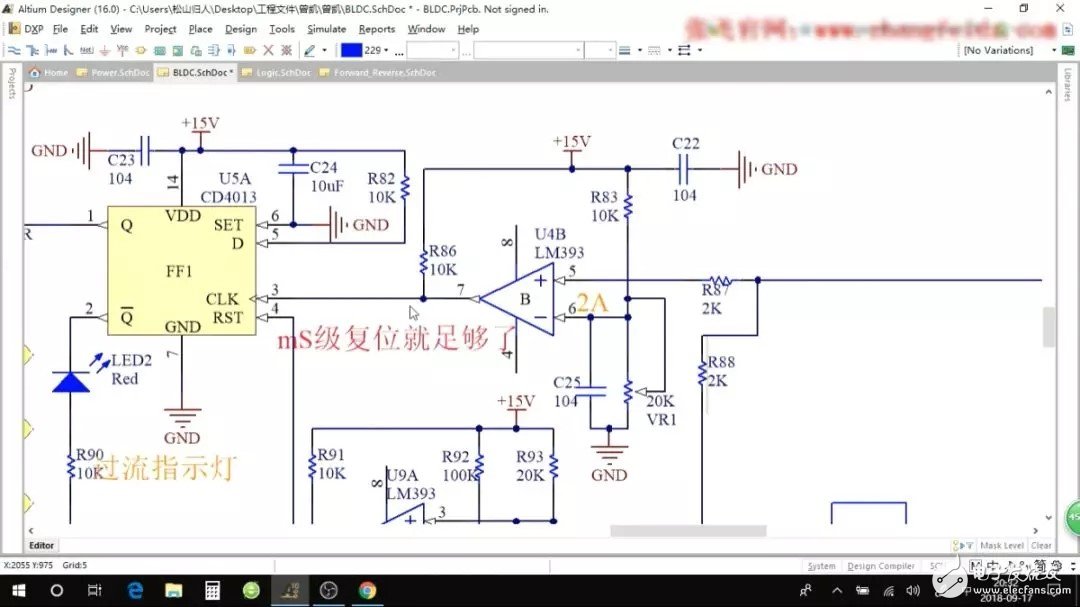
对于恒功率输出,需要对电路进行修改,如下图,RST接比较器输出,CLK接正常的PWM波, 接输出,一旦过流了,比较器输出为高,RST输入为高,Q输出就为低, 就为高。如果过流状态持续,下一个周期来临时,RST还是为高,那么Q还是为低, 还是为高,除非RST为0(不过流),那么Q才为高, 才为低,这样就实现了保护。
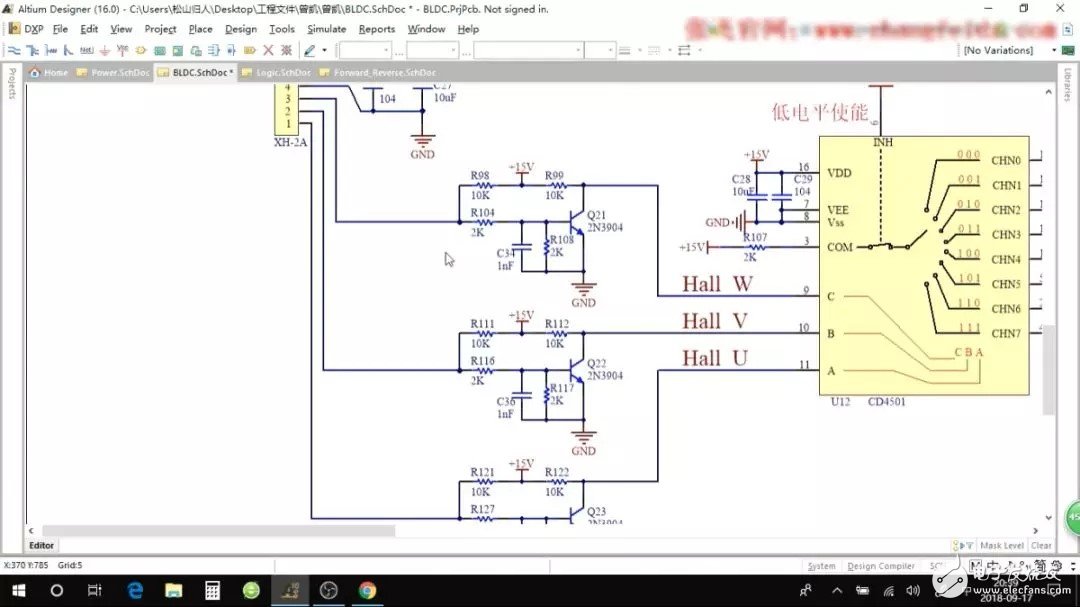
上面所说的电路方案是通过有位置搭建的,采用霍尔的方式,如下图,霍尔的信号通过多路选择开关,将三路霍尔信号转换成六路输出,六路信号通过与或门电路输出再送到CD4053模拟开关,再经过CD4081输出控制M1、M4、M3,进而控制MOS管的开通和关断,以上所说的是有位置的方波电路,当然还有其他的方案电路,比如有位置正弦波、无位置方波、无位置正弦波。
下面再给大家简单介绍一下无位置的三相马达电路,这个电路就复杂了些。
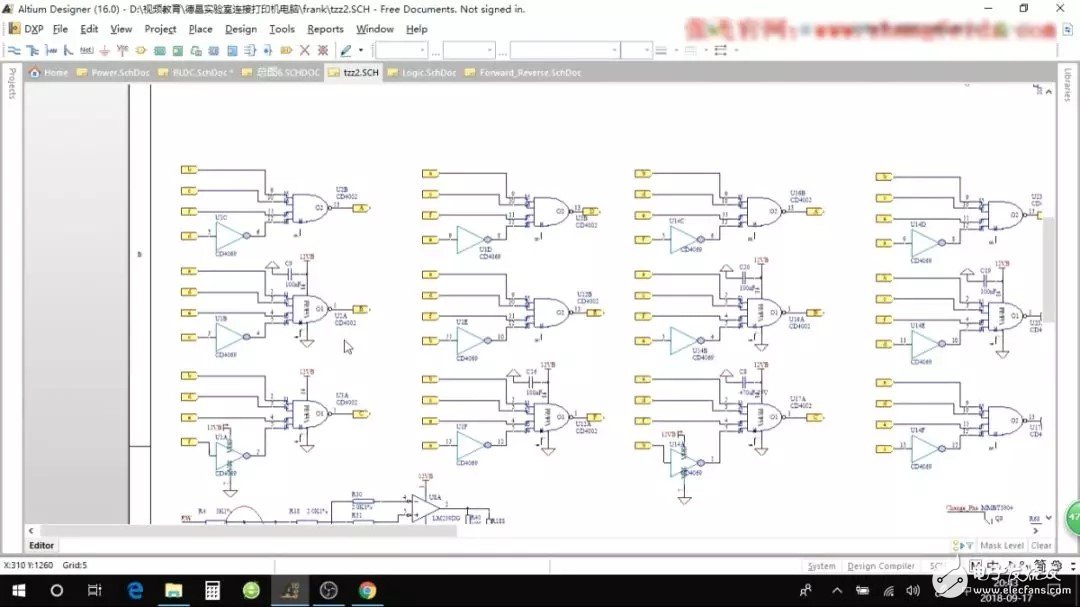
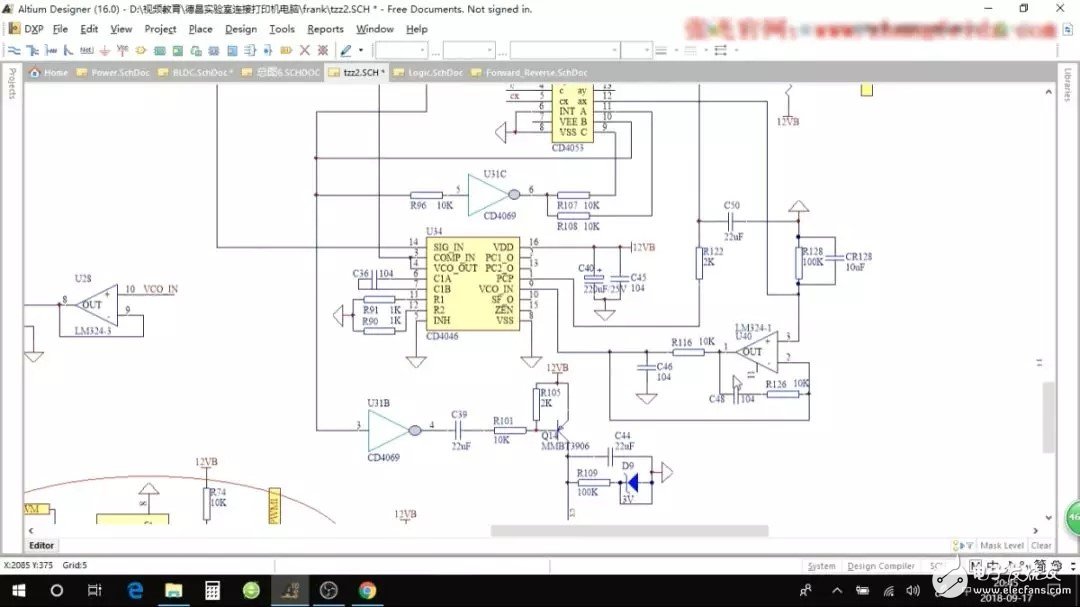
如下图所示,这是一个译码电路,马达转起来之后,需要将无霍尔转换成有霍尔,虚拟出一个霍尔,进而判断出它的位置,以及到下一项如何导通,根据当前的导通相序推出下一个导通相序。
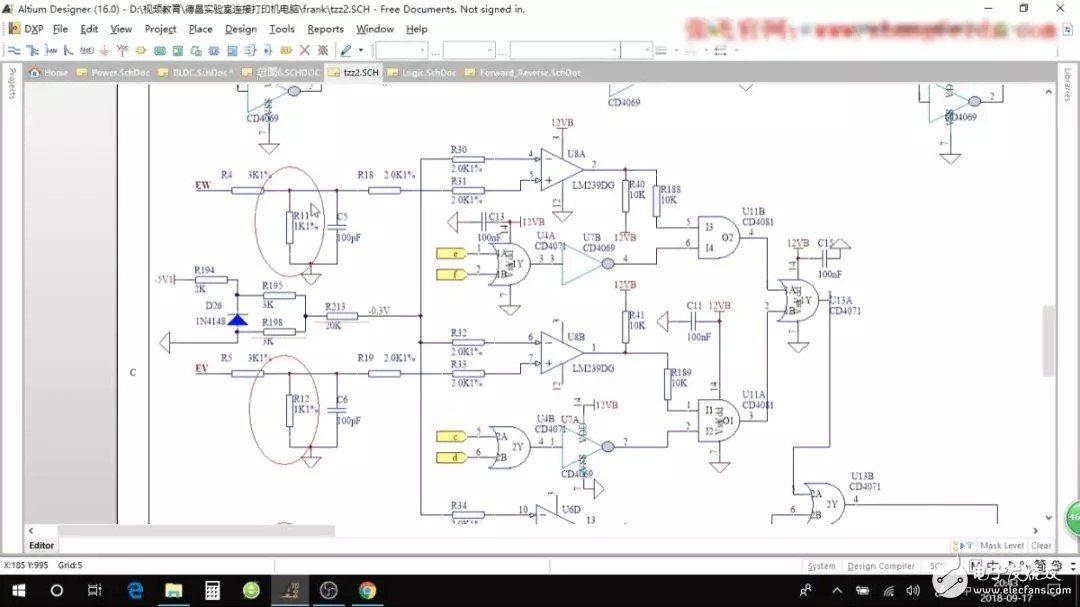
下图的这个电路是抓取当前相线的反电动势,低转速时采用电流检测法来做,高转速时,则采用电压检测法来做。最后再将高速、低速这两项进行合成,合成之后进行锁相环跟踪,跟踪后面需要进行换向和位置的储存。
下面的这个电路是实现电机的强拖,拖到一定程度之后需要替换。
下面这个电路是实现负压,在低转速时需要用到负压。
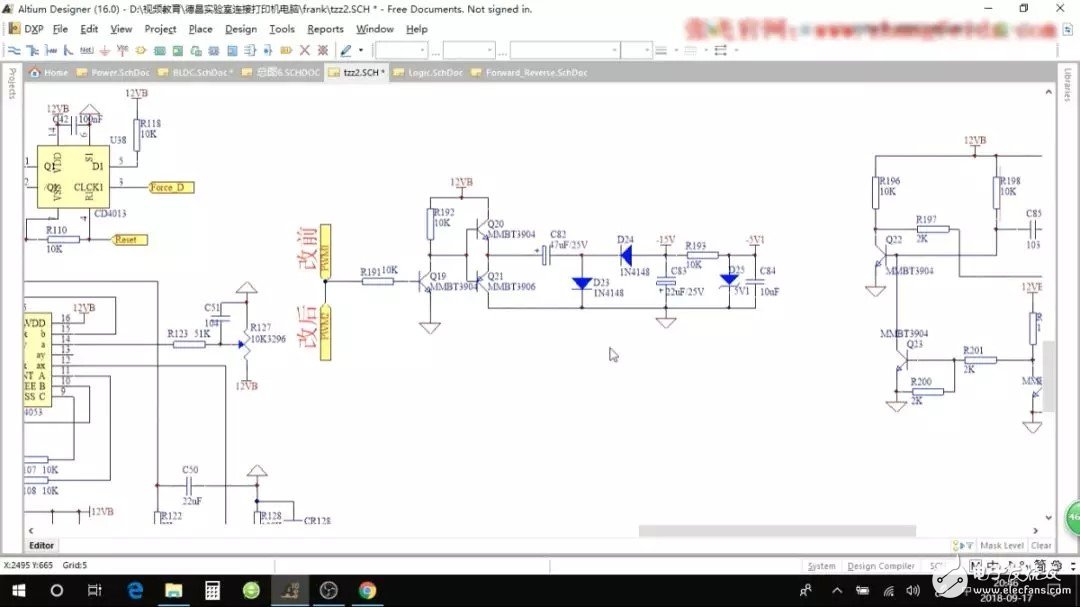
下面的这个电路是实现的消隐,马达在每次换向之后都需要进行消隐,是不能采集的。
下面的电路是三相桥电路。
这个方案就是把软件做的工作给换成硬件搭建实现,所以说软硬件是不分家的。
马达驱动作为电子行业最热门的行业之一,却又是人才非常匮乏的一个行业。自2016年开始通过视频学习来学习提高技术的方式已经非常普遍,效果也非常显著。教程比较多的有开关电源、模电、物联网、无人机、机器人等等,但唯独马达驱动类的教程真的少得可怜更别说质量高的教程了,毕竟社会上基于实战的硬件教育团队就那么几个而真正能把它讲面明白的团队是很少的。而BLDC方波控制、无位置方波控制、FOC空间矢量控制一直困扰着广大工程师,真正弄明白的聊聊无几。而实际上马达驱动技术教程有强烈需求的工程师或电子类学生是非常的广泛。小编强烈向大家推荐一门彻底将马达驱动器这项技术讲明白的课程:张飞软硬开源基于STM32 BLDC直流无刷电机驱动器开发套件
点击了解详情:http://t.elecfans.com/topic/42.html?elecfans_trackid= fsy_post
一、这门课程能帮到大家什么?
1、彻底学明白BLDC方波控制技术,方波无位置控制技术。
2、原理图设计:手把手教学员从无到有如何独立设计一个马达驱动系统的原理图
3、Pcb Layout:手把手教学员独立布好一个马达驱动系统PCB
4、程序编写:手把手教学员从无到有编写一个马达驱动系统程序
5、实际调试:手把手教学员实际调试一个的马达驱动的软件和硬件
6、避坑:分享在马达驱动器研发与生产过程中可能遇到的坑。
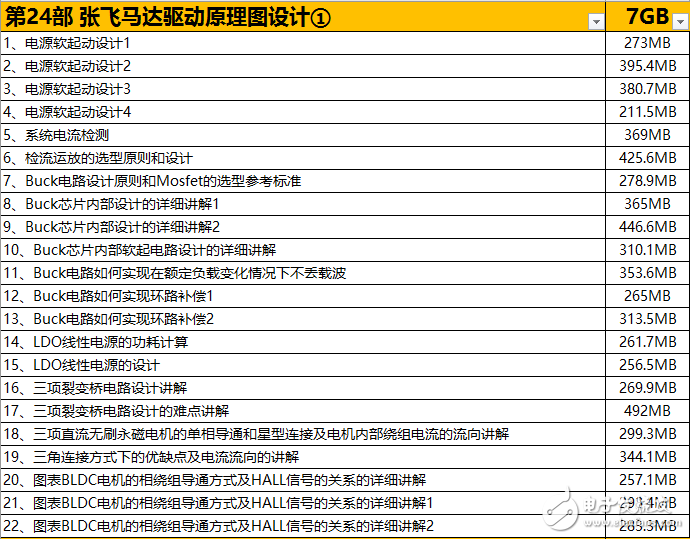
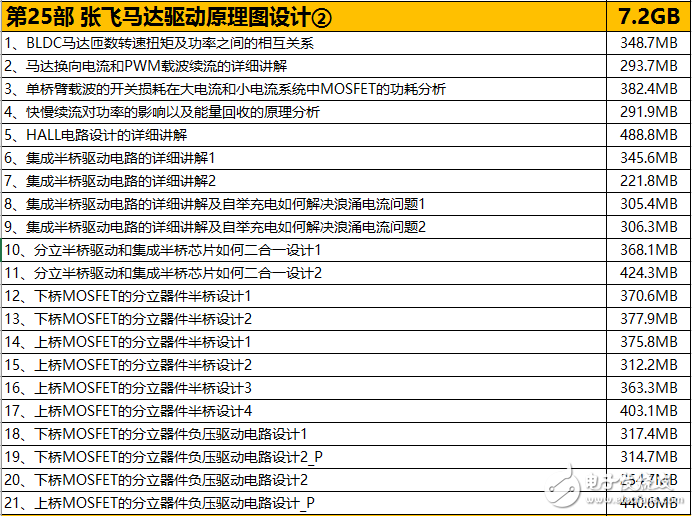
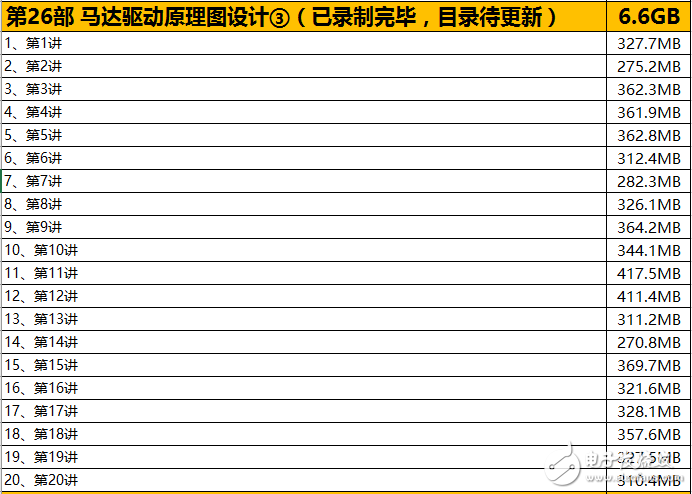
二、这门课程的目录是什么?
PS:本课程共包含8部视频,是24-31部(命名只是一种方式,24部前面的视频不属于马达教程哦)
三、这门课程的亮点是什么?
技术亮点
1. 支持主控板可更换
2. 支持MOFET驱动可更换(集成和分立)
3. 电源带软起功能
4. 有位置无位置全部兼容
5. 板子自带电子同时支持外接电机
6. 液晶显示转速等信息
7. 多个按键,旋钮调速
8. 测试点全部引出方便测试
9. PCB由支撑柱悬空,防止意外情况产生短路
10. 4合1运放,多个电流采集都不放过
11. 电流环(电流采样时刻点可设定),速度环(PI调速)双环控制
12. 支持过压欠压保护
13. 支持赌转保护
四、教学亮点
多名资深电机驱动工程师参与本项目
2、我们拒绝读PPT的课程,从原理图到pcb layout 到软件编写到驱动器调试全部是从无到有手把手教。
五、项目历程简单回顾
六、波形展示
七、原理图、PCB、代码
八、开发板
九、【 - 烧录器 - 】
:DAPlink仿真器
品牌:技小新
特点:
1. WIN10系统插上自动装驱动,WIN XP/7/8需要手动安装驱动
2. 支持所有Cortex-M内核单片机
3. 带虚拟串口
4. SWD下载方式
5. 最大下载速度:10Mhz
6. 支持KEIL5
十、【 - 开关电源 - 】
:AC100-240V
输出:24V/2A














 工商网监
工商网监
评论