引言
最近在低压硅锗和 BiCMOS 工艺技术领域的进步已经允许设计和生产速度非常高的放大器了。因为这些工艺技术是低压的,所以大多数放大器的设计都纳入
2010-12-21 11:09:44 920
920 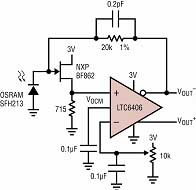
有没有机器人比较全的资料
2017-03-21 12:35:21
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
PID控制的优点有哪些?机器人控制技术有哪些重要性?
2021-06-18 08:02:56
直流电机如何实现驱动控制?机器人上到底用什么电机好?
2021-10-13 07:43:29
了。机器人:摔跤了吗?我:没摔。机器人:与前面矛盾了。你应该摔跤。我:……人工智能可以不断地从具体事例中归纳出道理或对规律的认识,道理积累多了,就可以形成一套系统的规则。大家看这样的思路有可行性吗?
2016-03-09 14:29:12
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:09:06
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:06:22
。.??有些品质是机器人应该遵循的,它应该有一个大脑(存储器或控制器)它应该有一个 ARM。(显然是用来装东西的)它应该有一个运动的驱动机制。(像自由度,运动和其他)它应该有一个末端执行器。(手指状
2022-03-31 10:31:31
若说当下的热门科技,机器人绝对算一个。机器人作为典型的机电一体化技术密集型产品,它是如何实现运作的呢? 机器人的控制分为机械本体控制和伺服机构控制两大类,伺服控制系统则是实现机器人机械本体控制
2021-09-17 08:22:50
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
有人会用labview调用python吗,或者有其他方法能实现这个要求?我在labview做了一个磁场发生的程序,驱动磁机器人运动,而且我这个机器人是绕着一个向量旋转向前的,就输入幅值频率那些就可以
2022-11-18 16:21:25
机器人运动控制技术,尽管运动控制器需求增长迅速,但即便到明年,整体市场规模仍不到 10 亿元。高性能工业机器人作为核心装备,一直被国外品牌垄断,而运动控制器的自主可控一直是国产机器人领域的一大痛点
2021-07-28 07:33:29
老师给我们3个人分别发了msp430 launchpad、DSPc200 launchpad、51开发板,要求我们设计一块公用的板子,通过接插方式分别实现对机器人的控制。也就是说当430插在
2014-04-21 10:04:34
有什么办法可以实现,不通过电的方式,控制BB8机器人内部电路的通断?从而控制电源的开关?也就是说怎么控制一个密闭容器内电路的通断?
2017-04-30 15:10:27
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
基础、机器人本体、电子控制设备、传感器与导航和机器人电源系统等。《机器人设计与实现》是按照搭积木的方法指导机器人爱好者如何设计、制作机器人平台,如何赋予机器人智能,使机器人能够运动、感知周围的环境和服
2017-08-01 18:21:38
大屏显示,多种显示接口,带来高清视觉享受;集成USB、UART、多路串口,可搭载满足机器人所需的多种外设;融合精准的人脸识别算法,可实现人脸识别方案落地。这个功能丰富的服务机器人也可应用于其他场所,如
2020-09-21 11:41:20
项目名称:机器人控制器试用计划:处于缩小尺寸可电源性能的考虑,看看有没有机会,现在遇到的问题尺寸首先,降低尺寸后方案电源质量降低。影响性能。此外用于机器人关节肿的伺服驱动也有应用,可同时试用。两款产品初样基本完成,看看有没有机会进一步优化,预计19年底量产。
2019-03-04 10:25:17
申请理由:考虑使用210做控制器主芯片,需要一块资源丰富的开发板做前期实验项目描述:机器人控制器,用于控制伺服驱动器,从而控制电机进行指定动作运转
2015-06-30 09:06:46
`卡酷教育机器人是一款面向各个年龄段机器人爱好者为实现制作一款属于自己的机器人而开发的教育机器人平台,迷你可爱的外形设计,抓住每个爱好者的心灵体验,采用Arduino Micro Robot 控制器
2015-01-13 10:41:49
就是说,一个机器人发指令,一堆机器人向这个机器人靠拢,可以通过zigbee么?或者是别的什么传感器?先谢过了!
2012-09-26 18:50:15
SC3150三协机器人控制器销售可维修,汕头市罗克自动化科技有限公司全心全意为您服务!联系人郭经理:159-1896-2164 SC3150三协机器人控制器 汕头罗克自动化科技有限公司
2020-03-27 15:22:31
`***同步微信。专业伺服驱动器回收-伺服放大器控制器西门子发那科回收,回收发那科放大器,回收发那科机器人,回收发那科CPU,回收发那科编码器,回收发那科显卡,回收发那科驱动器,发那科回收,发那科
2021-05-23 20:28:56
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
机器人不都是程序所控制的?所有的信号通过传感器集中到终端通过程序统一处理???
2016-09-20 21:11:47
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现
2015-01-19 10:58:38
有没有人知道什么是拖拽式机器人,其具体定义是什么
2016-03-11 09:20:00
企鹅机器人由BS2控制器控制两个角度舵机实现模拟企鹅的行走,包括前进,后退与转向,同时还可以控制另外两个角度舵机模拟企鹅翅膀的动作;语音播放模块可以发出企鹅真实的叫声。企鹅机器人前端装有超声波传感器
2016-03-29 17:29:52
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
本菜鸟刚学机器人控制,对于两关节机器人,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
2015-04-29 16:21:23
求一套写字机器人的程序,用arduino编写的。怎么实现
2020-10-17 15:20:25
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-09 10:02:13
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-14 09:56:50
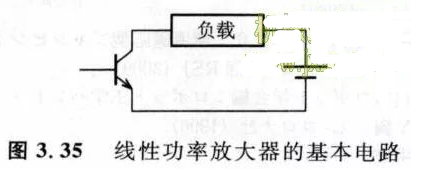
提供信号功率的放大器,通常称为功率放大器。功率放大器工作时,信号电压和电流的幅度都比较大,因此具有许多不同于小信号放大器的特点。功率放大器具体参数指标
2017-11-07 14:10:15
机器人是先进的机电一体化数字化装备,集机械、电子、控制、计算机、传感器、人工智能等多学科高新技术于一体,技术附加值很高。对提高产品的质量与产量、保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率
2015-09-02 14:03:18
`发那科FANUC控制器回收发那科放大器回收,发那科FANUC控制器回收发那科放大器回收回收热线***同步微信 专业回收发那科配件,回收发那科机器人,回收发那科控制器,回收发那科CPU,回收发那科
2021-07-27 13:48:18
`回收发那科放大器,回收发那科机器人,回收发那科CPU,,回收热线***同步微信。湖北武汉回收发那科控制器,发那科机器人,发那科系统,CPU卡件高价回收发那科驱动器回收,回收发那科放大器,回收发那科
2021-07-27 12:47:45
回收发那科机器人放大器,回收发那科机器人电机回收发那科机器人数控配件,回收发那科数控机器人配件回收发那科电源放大器,回收发那科伺服放大器回收发那科伺服器,回收发那科
2021-07-07 09:35:54
微信+手机 ***qq 3215674411微信+手机 ***qq 3215674411回收发那科机器人数控配件,回收发那科数控机器人配件回收发那科电源放大器,回收发那科伺服放大器回收发那科伺服器
2022-03-02 10:34:53
OI系 回收FANUC 伺服电机 回收发那科伺服电机 回收发那科伺服电机 回收FANUC A06B系列伺服驱动器 回收FANUC A20B系列电路板回收发那科电源放大器,回收发那科伺服放大器回收发那科机器人数控配件,回收发那科数控机器人配件高价回收发那科机器人成套系统。。
2021-09-23 20:53:24
一。引言 机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究更是处于机器人课题
2020-08-19 06:57:09
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
计算量增大,一般的单片机等处理器很难完成控制要求。而基于ARM的嵌入式服务机器人的控制器采用分层与模块化结构,充分体现可扩展性、可移植性的设计原则.同时具有低成本、低功耗、体积小巧、可靠性高、智能化高以及通用性等特点。那么我们具体该 如何利用ARM研究嵌入式服务机器人控制器呢?
2019-07-30 07:02:31
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
2019-07-31 06:23:18
最近构思想做一个简单的机器人,这个机器人安装有摄像头、机械手且通过无线控制行走和动作,采用nrf24l01+无线模块来实现通讯,人可以远程结合摄像头来操作机器人。现在我想把这个发射端遥控装置建立一个
2014-10-25 13:31:35
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
、逆向运动学求解,以实现机器人的操作空间坐标和关节空间坐标的相互转换,完成机器人的轨迹规划任务,实现高速伺服插补运算、伺服运动控制。控制器主要分为硬件和软件两部分:硬件是指工业控制板卡,包括主控单元
2017-08-23 15:10:27
、以及内部传感器等组成。它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。[img][/img]控制器是机器人的神经中枢。它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件
2017-12-15 10:25:19
模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线
2018-11-23 10:40:38
怎么实现六足机器人的设计?
2021-11-22 08:02:22
怎么实现基于stm32的grbl写字机器人的设计?
2021-11-26 06:52:18
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
怎样为机器人控制器与变频器等工业设备进行通讯接口的升级呢?
2021-12-23 08:00:47
大家应该都知道天津博诺移动机器人的比赛请问手柄控制机器人的程序框图是什么包括子vi可否分享一下求大佬。
2017-12-17 10:27:34
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
扫地机器人工作。二 智能扫地机器人控制方案简介1. 方案概述智能扫地机器人控制方案实现方式是用户可以通过智能手机微信绑定扫地机器人,无论用户在何时何地,都可以利用远程控制,对扫地机器人进行监控和操作
2017-05-27 13:31:20
通信方案(大量网友调用成功)具体协议大致如下,易读、易调用、易拓展、易更改。源码文件:进入下面公众号:小白学移动机器人,发送:串口通信升级。即可获得
2021-08-20 06:33:28
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
2019-10-16 08:27:30
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
机甲大师机器人的软件架构设计如何实现?
2021-11-22 07:55:21
桁架机器人核心配件介绍1.控制器在数控机床机器人控制器方面,目前通用的多轴控制器平台主要分为以嵌入式处理器(DSP,POWERPC)为核心的运动控制卡和以工控机加实时系统为核心的PLC系统,其代表
2018-11-22 12:08:23
第七届工训赛水中机器人电控方案设计
2021-11-12 07:00:21
机器人最为核心的零部件之一,对机器人的性能起着决定性的影响,在一定程度上直接影响着机器人的发展。那么机器人控制器的功能是如何实现的呢?2. 机器人控制器实现方案前面提到了,机器人控制器的主要作用是完成多
2023-02-17 16:03:26
江浙沪上门高价回收发那科机器人成套放大器,回收发那科主板,联系方式***同步,回收发那科内存,回收发那科I/O板,回收发那科手轮,回收发那科CPU卡, 回收发那科轴卡, 高价回收FANUC电路板
2021-05-25 09:47:16
儿童陪护机器人中得到了广泛应用。
在儿童陪护机器人中,步进电机芯片主要用于转动控制。在此过程中,控制器通过对步进电机芯片输出的脉冲信号进行控制,使得步进电机以一定的步距旋转,从而实现机器人的转动控制
2023-05-11 15:12:45
电话微信同步:***,QQ452537481在线.烟台本地专业回收发那科机器人放大器回收整套拆机三菱伺服电机山东省范围专业回收发那科机器人放大器,回收发那科机器人电机回收
2021-09-14 09:27:45
)驱动- 高频亥姆霍兹线圈(高电流)驱动- MEMS微机电系统(高电压)驱动- 脉冲和瞬态器件(高功率)驱动电压放大器具体参数型号,选型手册参考
2017-09-29 16:41:44
中移动,可以在机器人周围移动并独立放置。对于任何一种方法,这都不是专业或不同的,您需要确定哪个更重要的是您的系统。散热 - 电机放大器通常需要散热到金属(导热)表面。与上面的体积考虑类似,在哪里可以更
2018-07-30 10:12:09
描述相扑机器人控制器我的 Sumo 机器人比赛项目,我使用了 ATmega2560 -16au 微控制器和 BTN7960B 电机驱动器、6 轴加速度计和陀螺仪,并且我为您将在机器人中使用的传感器
2022-06-28 06:38:47
` 以刀削面机器人的控制器为开发对像 开发如下控制器跟大家分享下本控制器已经经过检验,并已批量生产。哈哈哈哈哈。 已有不少合作商家前来定货啦`
2014-02-21 16:28:49
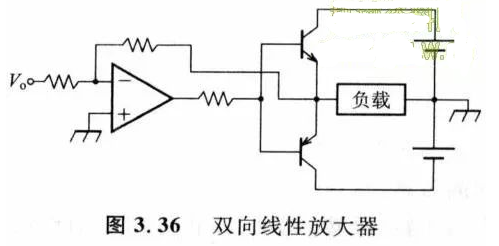
在电路中经常遇到误差放大器,该电路的原理是什么,如何实现其误差放大功能的?对于具体的误差放大器电路分析?
和差分放大器、比较器的区别是什么?
2024-01-26 21:53:10
机器人怎么实现前后左右的移动?
2021-10-08 09:21:23
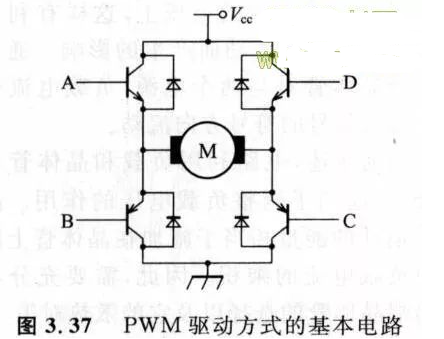
D类放大器具有什么特征?
2021-04-22 06:05:10
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
的能力。红外模块可以实现对一些外部电器的操控,电池和电池管理模块给整个机器人的运转提供能量。辰汉-硬件结构是实现服务机器人运算和控制的基础,在高性能嵌入式处理器上运行的操作系统,进行着服务机器人具体
2017-06-09 17:18:49
,机器人控制器作为工业机器人最为核心的零部件之一,对机器人的性能起着决定性的影响,在一定程度上直接影响着机器人的发展。那么机器人控制器的功能是如何实现的呢? 机器人控制器实现方案 前面提到了,机器人
2023-02-24 17:05:21
如何用STM32通过计数 如何实现控制机器人的各种行走动作
2016-06-07 09:49:43
通过视觉传感器获取互动表演者的手臂姿态,挥动双手臂模仿表演者的动作,实现对机器人的仿生模拟控制。邯郸学舞机器人由一个视觉传感器、两个三自由度手臂、机器人身体和视觉处理控制器等组成;该机器人通过视觉传感器获取互动表演者的手臂姿态,挥动双手臂模仿表演者的动作,实现对机器人的仿生模拟控制。
2016-03-28 11:42:25
微信同步:*** QQ:3334741838 王先生回收发那科机器人数控配件,回收发那科数控机器人配件回收发那科电源放大器,回收发那科伺服放大器回收发那科伺服器,回收发那科放大器,回收发那科驱动器
2021-06-29 12:32:42
青岛发那科机器人SERVO-062伺服报警故障维修FANUCF-200iB七轴点焊机器人在对控制器断电检修后,控制器通电运行时,发那科机器人发出伺服故障报警,报警故障代码为SERVO-062。对此
2020-10-12 15:45:14
和工艺可实现独立电子控制的折纸三维软体机器人、爬行软体机器人以及柔性抓取器等。
测试设备:所需的设备主要包括MC-3020激光切割机(铭创)、亚克力四向拉伸机构、高压电源(Aigtek)、信号源
2024-02-27 17:15:22
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论