牵涉到开关电源技术设计或分析成为电子工程师的心头之痛已是不争的事实,由于广大工程师网友对前两期的热烈反响,电子发烧友再接再厉推出《工程师不可不知的开关电源关键设计
2012-02-28 11:16:04 14093
14093 
牵涉到开关电源技术设计或分析成为电子工程师的心头之痛已是不争的事实,由于广大工程师网友对前四期的热烈反响,电子发烧友网再接再厉推出《工程师不可不知的开关电源关键设
2012-03-09 10:47:336872 顾名思义就是无人机自主躲避障碍物的智能技术。很多玩过无人机的小伙伴们都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因为操作失误而带来的各项损失。在减少炸机事故次数的同时,还能给无人机新手极大的帮助!
2016-12-16 09:10:254844 抛飞、跟拍、林中避障、手表控制、空中作画……11月3日午夜,大疆创新放出了一段“精灵X”的宣传视频,展现了一些目前在主流多旋翼无人机上还没有实现的“黑科技”,引发广泛关注。
2015-11-04 08:18:591648 如今消费者级无人机最大的需求或许正是无人机的避障功能。让无人机按照预先设计好的飞行路径跟随着你这种做法很不错,但是倘若无人机在中途撞上了障碍物,那么这会是一场代价昂贵的教训。
2016-11-05 10:17:12896 最近,一直植根于无人机在农业中应用的极飞科技有了新动作,他们发布了 XCope「天目」无人机视觉系统(XAIRCRAFT XCope UAV Vision System)。这个系统融合了双目避障和地形视觉模块,让植保无人机拥有了感知环境的能力,进一步提升了它的作业效率和安全性。
2016-12-06 10:00:2315800 随着无人机的功能不断增加,GPS传感器、红外传感器、气压传感器、超声波传感器越来越多地被用到无人机上。而你又是否知道,众多传感器中超声波传感尤其有助于无人机着陆、悬停、地面跟踪。
2018-01-25 17:37:0014762 纳雷科技为无人机精心打造了一款实时探测双波束77GHz毫米波避障雷达MR72-UAV。它适用于全天候、全天时、全地形的无人机自主飞行、定点巡航过程中的自动避障。可支持同时输出多达50个目标的距离
2018-11-02 16:57:458011 2015年,随着无人机爆发式的增长,国内外无人机企业纷纷展开了全方位的角逐,各种层出不穷的新技术也相继登场。市场上的竞争说白了还是技术上的积累与比拼,那么,问题来了,今年无人机企业在技术发展上做出了哪些创新与实践呢?哪些技术能在无人机技术琅琊榜上留下一笔呢?
2020-05-11 08:25:02
` 本帖最后由 24GHz_radar 于 2018-4-6 09:39 编辑
产品名称:24GHz微波测距雷达 FMK24-A系列 距离传感器FMCW无人机避障雷达 产品型号:FMK24-A
2018-04-06 09:36:31
不可不知的ARM技术学习诀窍
2012-08-20 23:52:13
不可不知的嵌入式工程师经验(总结篇)
2012-08-20 10:52:28
无人机GPS模块的作用
2020-12-16 06:02:27
你也许听过这么一句话:无人机是飞行的“传感器”。也就是说,如果没有各种传感器控制飞行、机身稳定、航行方向、捕捉录像,无人机的飞行的稳定性用途便无法实现。在市场上,很多民用无人机,都装载有各种型号的传感器。目前,这些商用无人机正开始向物流、航拍、农业植保、环保检测、电路检修等多领域渗透。
2020-05-19 07:31:42
无人机在快递服务、仓储服务领域不断有新的进展,除科技公司、物流企业之外,亦不乏零售商家的身影。美国联邦航空管理局8月底推出了商用无人机新规定,当下无人机监管环境已开始转向,但大范围实现无人机商用仍有诸多障碍需要克服。
2020-05-13 06:35:22
` 无人机是如何上升的?`
2019-08-28 16:27:19
` 谁来阐述一下无人机应用技术专业如何?`
2019-08-28 16:31:41
杜克大学教授和该所大学人类和自治实验室主任米西·卡明斯经常想象无人机快递到来的那一刻,她喜欢想象自己八岁的儿子看到无人机落在自己家后院时的反应。卡明斯说:“如果无人机出现的话,他一定会向无人机扔石头,这是人的本性。”
2020-05-06 08:27:33
谁知道无人机怎么悬停的吗?
2019-08-27 15:50:10
` 谁能阐述一下无人机是怎么操作起飞的?`
2019-08-27 15:39:15
` 谁知道无人机是怎么连接手机的?`
2019-08-27 15:45:56
`无人机是一个新兴的高科技产业,从研发、制造到使用、管理及服务涉及诸多领域。那么你脑海中的无人机应该是什么样子的呢?搭载导弹的军用机?迷你航拍的消费机?喷洒农药的农用机......不可否认,无人机
2017-11-15 11:57:36
无人机控制系统原理是什么?
2021-11-08 08:24:27
无人机有哪些等级?
2021-06-18 06:10:56
在过去十年中,很少有新兴技术像无人驾驶飞行器(UAV)或者更简单的无人机那样强烈地吸引了公众的想象力。这些技术的开发和使用以前主要限于军事目的,但从21世纪后期开始,智能手机的巨大商业成功和广泛普及
2019-02-21 18:18:23
如今,我们经常在很多公园或空旷场所看到有人玩那种小型无人机,每次看它们拿着手里的遥控器,让无人机自由翱翔于空中,这种感觉很“酷炫”,可是您知道无人机的工作原理吗?
2021-01-13 06:34:07
无人机并非这几年才兴起,消费级无人机主要也是在航拍领域里面发展。但事实上无人机的应用在很多年前就出现在我们的生活当中,农药喷洒、电力巡航,警用侦查等等都有无人机的用武之地。只是对大众来说,这些领域
2020-08-20 07:59:22
服务采用喷雾喷洒方式至少可以节约50%的农药使用量,节约90%的用水量,这将很大程度的降低资源成本。电动无人机与油动的相比,整体尺寸小,重量轻,折旧率更低、单位作业人工成本不高、易保养。 以上就是
2019-06-28 10:06:03
` 谁知道无人机类型分为多少种?`
2019-08-28 16:53:29
上周,第十七届高交会无人系统展分会场——中国(深圳)国际无人系统技术成果交易展览会在深圳完美落幕。素有高新技术领域的“行业风向标”、“技术风向标”和“创新风向标”之称的高交会,点燃了无人机世界
2020-08-20 06:58:58
`图片来自新浪军事现在无人机越来越多,现在经常可以看到有一架无人机在窗口晃来晃去,如何对这种无人机进行处理?打下来的话可能会砸到人,可以诱捕吗?`
2015-06-05 11:54:05
`无人机应用逐渐代替传统作业方式随着我国低空空域的逐渐开放,无人机的应用也越来越广。在民用领域,它以其运行成本低、无人员伤亡风险、机动性能好、可进行超视距飞行、使用方便高效等特点受到广泛关注,在影视
2016-06-28 11:33:46
在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。
2019-10-22 07:58:23
精确控制或避障),光流传感器(悬停水平位置精确确定),GPS 模块(水平位置高度粗略定位),以及控制电路组成。主要的功能就是自动保持飞机的正常飞行姿态。无人机是用无线遥控设备和程序控制装置操纵的不载人
2018-04-23 17:22:42
申请理由:目前无人机的避障系统无法满足自主飞行的要求,所以需要使用雷达来到作为无人机的导航部件进行飞行中的避障和实时测绘等功能项目描述:1. 无人机自主飞行时候避障部件2. 无人机飞行测绘部件,通过雷达对周围环境进行一个简单的测绘
2016-01-11 14:54:52
申请理由:我是一名在校大学生,现在正在做毕业设计(植保无人机),在校期间曾参加过机电大赛、挑战杯、飞思卡尔智能车等一系列比赛,具备一定的实战能力。在设计植保无人机期间,尚未找到合适的避障模块。我通过
2016-01-11 14:53:57
ABS 高韧性旋翼。碳纤维支架的下方是电池的插槽,电池插槽下方是光流模组、视觉模组以及激光模组 2 个(其中一个为预留,可用于避障使用)。无人机主板上的各个接口如下图所示。图2机架的下方物件如下图所示
2022-08-19 18:16:13
需要其他的资料,可以留言、我帮你找,O(∩_∩)O谢谢1.无人机在电力线路巡视中的应用https://www.elecfans.com/soft/study/ms/2017
2017-02-15 21:06:18
买笔记本电脑不可不知道的10个热点问题
2012-08-10 10:49:57
“如果飞控被称为无人机的大脑,那么图传系统就可以比做无人机的“眼睛”。”深圳优鹰科技蔡英杰博士曾在接受宇辰网专访的时候这样形容无人机的图传系统。最近,一篇《摘掉有色眼镜来聊一聊:为什么亿航VR眼镜
2019-08-09 08:20:07
医疗物流航线,守护生命安全。
技术突破:芯片技术进步让无人机更智能,续航更长,避障更精准,为大规模商用奠定基础。
03购芯片
低空物流的腾飞离不开无人机核心部件的支撑,而芯片作为无人机的“大脑
2025-07-04 10:42:48
1、写好LabVIEW程序不可不知的利器(一):模块化功能 VI2、写好LabVIEW程序不可不知的利器(二):State Machine3、写好LabVIEW程序不可不知的利器(三):进阶应用4、写好LabVIEW程序不可不知的利器(四):Event Producer/Consumer
2014-11-20 15:38:19
雷达探测到的无人机特征与摄像头拍到的无人机外观进行融合,综合确认目标信息。发现目标后,进入阻截阶段。阻截方式包括无线电信号干扰、激光打击、撒网缠绕目标、电磁脉冲以及这些手段的组合使用。对无人机通信
2022-09-08 10:10:18
当前,各国反无人机技术主要分为三类。一、干扰阻断类,主要通过信号干扰、声波干扰等技术来实现。二、直接摧毁类,包括使用激光武器、用无人机反制无人机等。三、监测控制类,主要通过劫持无线电控制等方式实现
2022-08-25 11:57:01
由交通部和美国联邦航空管理局成立的特别小组锦衣新的和现存的无人机到联邦***注册。该任务小组包括无人机行业和航空安全社区的成员,提出重量超过250克的无人机必须注册。
2020-05-12 06:23:14
` 谁能阐述下大疆无人机怎么悬停?`
2019-08-27 15:13:09
如何实施植保无人机方案?
2021-12-20 06:55:01
如何设计出一个利用PPM控制无人机动作的四轴无人机?
2021-09-23 06:47:19
去北方蓝天无人机培训学校啊4大优势:1、包学包会、学会为止2、免费复训3、尊享优惠,创业支持4、百分之百取证就业,多旋翼就业,直升机就业,固定翼就业。可从事工作:无人机航拍,无人机电力巡线,无人机
2016-12-15 09:46:19
无人机的基本概念有哪些呢?无人机的基本结构是由哪些部分组成的?怎样去解决无人机的续航问题呢?
2021-12-20 07:11:26
在我国,据专业机构计算农业植保无人机在20%耕地渗透率的情形下,千亿无人机农用市场尚待开发。但以汉和、极飞、全丰为代表农业无人机企业的“整机+植保服务” 运营模式早已初步确立。但是即便这些在植保
2020-05-12 08:32:48
无人机的飞控是什么意思?姿态解算是指什么?无人机的基本结构是由哪些部分组成的?
2021-12-20 06:46:19
”的无人机秀绝活,还能遇见会“听话”的鼠标,还能在200平米展厅体验3D动漫。“合肥造”植保无人机将亮相从深圳无人机查违规建筑,到四川启用无人机上高速“巡逻”,无人机能做的事情越来越多。
2020-05-15 07:02:04
有做过无人机的发点资料
2015-11-07 19:17:35
,有着众多无人机在空中遇到飞行障碍物,导致飞行困难现象时有发生,因而避障问题也是制约无人机发展的关键挑战之一。那无人机是否可以主动避障呢?无人机因其机动性强,对地形要求低的特点,需要良好的避障能力,可
2021-09-27 16:46:01
你好老师让做无人机方面看哪个型号单片机 具体一点谢谢
2015-12-09 12:49:32
识别金属结构、高压线等障碍物的磁场特征,0.2 秒内就能触发避障,让无人机灵活躲开危险。
在城市物流无人机配送中,离轴技术大显身手。某物流企业要实现 20 公里内精准投递,给无人机机翼两端装上 KTM59
2025-09-05 16:32:50
的生活。它们或在空中拍摄美景,或在农田里施肥喷药,或在物流领域完成“最后一公里”配送,成为了现代社会不可或缺的一部分。
然而,随着无人机数量的激增,无人机安全问题也日益凸显。非法入侵、恶意攻击、隐私泄露
2024-03-12 10:56:16
。。。ppoirier大叔想要宅在家里。。。感觉有点无聊。。。最后,大叔决定做个最新最炫最酷的180°精准避障无人机玩玩。。。首先,ppoirier先去研究了一下避障工作原理以及近距传感器的数据交互
2018-02-02 13:58:58
近日,北京某研发团队开发出了一套基于互联网的远程操控无人机系统“TeleUAS”,通过无人机、专用的网络通道、远程端控制软件,可以让用户通过网络远程操控异地的无人机,通过机载摄像头传回的高清视频
2020-05-12 07:38:04
不可不知关于手机电池的一些常识!
关于手机电池寿命! 这是我新买手机的时候在网上搜刮到的资料,我觉得最好还是看看说明书,说明书里
2009-10-24 14:42:41870 七则不可不知的电池常识
一、电池有保质期吗? 电池是通过其内部的正负极发生化学反应,
2009-11-14 10:40:371079 充电电池不可不知的基本常识 一.电压:两极间的电位差称为电池的电压。主要有标称(额定)电压、开路电压、充电终止(截止)
2009-11-14 10:45:483974 手机使用常识及手机电池不可不知的小常识
手机使用常识
1、使用手机时,不要接触天线,否则会影响
2009-11-23 15:20:122273 笔记本电脑电池不可不知的常识
电池的分类和区别 一般我们使用的电池有3种,1.镍铬电池、2.镍氢电池、3.锂电池;它们一般表示为:
2010-01-23 10:06:24886 数码相机术语大全(不可不读)
1.ae锁
ae是au
2010-01-30 14:06:12891 不可不知的投影幕选购常识
前言: 当今,无论是商务活动,还是居家生活,人们对于大屏幕显示画面、高亮度、高分辨率以及高
2010-02-10 11:10:26865 电脑木马识别的三个小命令(不可不知)
一些基本的命令往往可以在保护网络安全上起到很大的作用,下面几条命令的作用就非常突出。
2010-02-23 14:17:191371 显示卡不可不知15大参数
1、 帧率(Frames
2010-01-12 09:49:041209 微软Azure大数据服务魅力凸显 Azure术语不可不知 大数据正上增工,不仅是规模,知名度也在上升。
2016-11-10 11:02:111502 最近,一直植根于无人机在农业中应用的极飞科技有了新动作,他们发布了 XCope「天目」无人机视觉系统(XAIRCRAFT XCope UAV Vision System)。这个系统融合了双目避障和地形视觉模块,让植保无人机拥有了感知环境的能力,进一步提升了它的作业效率和安全性。
2016-12-05 20:30:512431 无人机要想被冠以人工智能机器的称号,当然不能仅仅满足于飞起来而已!关于未来的人工智能无人机的构想,无人机通常被想象为一架飞行中的机器人。这架飞行机器人不但能够和人交流,还能独立完成任务或解决问题。 其实这些高度智能的功能已经在开发之中了,今天AOPA云小编要介绍的就是无人机黑科技中的避障技术!
2016-12-16 02:27:114026 不知不觉,又快要到新一年度的 CES 了。在 2016 年的 CES?最拉风的,莫过于是 Yuneec 与英特尔合作的 RealSense 无人机智能避障表演;然后 XIRO 展出了引入激光避障技术
2016-12-19 14:54:553693 
在 2016 年的 CES?最拉风的,莫过于是 Yuneec 与英特尔合作的 RealSense 无人机智能避障表演;然后 XIRO 展出了引入激光避障技术的 Xplorer 2,也引入了激光避障
2016-12-21 11:31:411093 近年来,机器人领域一直有个老大难问题:如何将感应器和算法结合起来,让无人机实现避障。要知道,小型无人机通常都飞得很快,它没有为感应器或计算机设置有效载荷能力,帮助它避开在飞行过程中可能遇到的,类似
2017-09-20 11:25:31 2
2 随着新一轮娱乐类无人机的发布,避障再一次成为热点。无人机为什么要避障,怎么避障,有哪些技术和坑点?今天来八一八。 无人机本来在高空穿梭,不知障碍为何物。可是多旋翼的普及改变了一切。植保,运货,勘测
2017-09-20 14:42:494 工程师不可不知的电源11种拓扑结构基本名词电源常见的拓扑结构■Buck降压■Boost升压■Buck-Boo
2018-04-22 10:06:3141495 
在前避障时代,消费级无人机的使用说明上都会标明必须在开阔场地飞行,而且应当尽量避免周围有大量人群(当然,这也与当前技术和市场环境使得消费级无人机产品的可靠性较差有很大关系),因为一不小心操作失误
2018-04-26 15:51:5712820 科技”中的避障技术! 什么是无人机避障技术? 顾名思义就是无人机自主躲避障碍物的智能技术。很多玩过无人机的小伙伴们都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!工业无人机避
2018-04-27 20:24:521643 红外或激光测距是目前应用最为广泛的无人机探测技术,但是由于它是通过信号来计算的,因此很容易受到外界因素的干扰,用于自动避障的功能并不是很合适。而双目视觉技术则不会受到太大的外界干扰,因此虽然该技术的难度较高,但是已经开始逐渐被应用到无人机避障技术中来。
2018-05-29 09:01:005460 英特尔致力于不断开发创新技术,并引领无人机领域——尤其是商用无人机领域。 过去几个月,英特尔一直致力于无人机领域,并宣布推出首个消费类无人机——采用英特尔实感技术进行智能避障的Yuneec Typhoon H,以及能够帮助开发者从头构建自己的无人机的英特尔Aero平台。
2018-05-20 09:22:004880 (Laser) 等。这些技术各有其优缺点,且成本也有差异性。近年来随着机器人 (Robot) 、无人机 (Drone) 、无人搬运车、自动驾驶等新概念系统的兴起,连带刺激测距与避障 (Obstacle
2018-07-12 14:26:308006 无人机自动避障技术 近年来,随着多旋翼消费级无人机市场的飞速增长,其相关技术也正在发生日新月异的变革,以往多用于特种行业甚至军用产品上的技术(如飞行控制、图像传输、目标识别和跟踪等)也越来越多地用于
2018-08-21 18:03:012955 无人机网援引美媒消息称,Aerobits是无人机微型航空电子技术开发商,已宣布推出TIM-SC1,这是一种专为小型无人机检测和避障系统而设计的模块。
2018-08-31 16:39:485023 本文主要详细阐述了PCB板工艺不可不知的小原则。
2018-10-05 08:48:006593 本文主要汇总了电气人不可不知的45个电机知识,具体的跟随小编一起来了解一下。
2018-10-05 09:06:005318 近年来,随着多旋翼消费级无人机市场的飞速增长,其相关技术也正在发生日新月异的变革,以往多用于特种行业甚至军用产品上的技术(如飞行控制、图像传输、目标识别和跟踪等)也越来越多地用于消费级无人机,使其越来越接近于自动化甚至智能化飞行机器人的概念。
2019-03-13 13:57:0436659 基于TX1和立体相机的无人机避障系统裘希菲摘要:提高无人机的精度和处理性能是目前研究的一个热点。提出一种新的
2019-03-29 10:18:513678 避障技术,顾名思义就是无人机自主躲避障碍物的智能技术。
2019-05-23 11:10:129309 无人机已经成为了传统生产力革命的一支生力军。无人机如何主动避障?
2020-01-01 16:57:003530 
提及无人的发展,安全是无人机行业健康发展的基石!无人机降落辅助是无人机所具有的一项功能,可以检测无人机底部与着陆区域的距离,判定着陆点是否安全,然后缓慢下降到着陆区域。
2020-03-24 11:41:314101 无人机既灵活又敏捷,但有时太快或太暗,遇到障碍时未必会避得了。现在市场的趋势是为无人机配置越来越多的传感器,去提升避障能力。近日,有研究人员就研发了廉价又轻巧的传感器,灵感来自飞蚊。
2020-05-19 09:02:171544 避障技术,顾名思义就是无人机自主躲避障碍物的智能技术。无人机避障一直都是业界的难题,行业精英也尝试寻求解决之道。从避障技术发展历史来看,目前相对成熟的无人驾驶当仁不让。
2020-06-17 11:43:344374 无人机躲障技术至关重要。 但目前商用无人机基本上只能躲避建筑等静态障碍物,很难规避鸟类等动态障碍物。 不过苏黎世大学研究团队近日成功开发出一个新系统,能够快速响应并躲过扔向它的蓝球。 目前无人机避障
2020-11-25 14:47:172095 避障技术,顾名思义就是无人机自主躲避障碍物的智能技术。很多玩过无人机的小伙伴们都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因为操作失误而带来的各项损失。在减少炸机事故次数的同时,还能给无人机新手极大的帮助!
2020-12-28 16:55:345599 无人机是利用无线电遥控设备和自备的程序控制装置操作的不载人飞机。在无人机飞出用户视野范围时,为了精准地控制无人机,需要准确地测量无人机飞行的高度、飞行速度、以及位置等信息。下面工采网小编和大家一起看看利用UM0090收发一体式超声波避障传感器模组实现无人机高度精确测量。
2023-03-07 09:25:352196 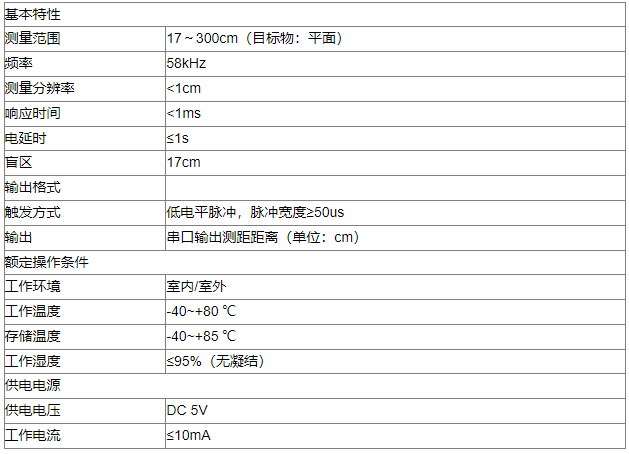
MOSFET电路不可不知MOSFET已成为最常用的三端器件,给电子电路界带来了一场革命。没有MOSFET,现在集成电路的设计似乎是不可能的。它们非常小,制造过程非常简单。由于MOSFET的特性,模拟
2022-05-10 16:35:252244 
飞控系统是无人机的核心,它包括飞行控制器和相关的传感器。飞行控制器负责接收和处理来自传感器的数据,并控制无人机的飞行。传感器可以包括陀螺仪、加速度计、罗盘、气压计等,用于感知无人机的姿态、位置和环境。飞控系统能够稳定地控制无人机的飞行,确保其安全、稳定地悬停、导航、避障等。
2023-08-15 15:11:243697 根据目前无人机避障技术的发展以及其未来的研究态势,无人机避障技术可分为三个阶段,一是感知障碍物阶段;二是绕过障碍物阶段;三是场景建模 和路径搜索阶段。这三个阶段其实是无人机避障技术的作用过程。从无人机发现障碍物,到可以自动绕开障碍物,再达到自我规划路径的过程。
2023-09-08 10:35:062425 
在无人机的世界里,视觉不仅定义了飞行的边界,更是智能决策的核心。肇观电子以其突破性的AI视觉芯片,赋予无人机前所未有的感知与认知能力。 基于肇观自研芯片的两款无人机视觉避障模组:无人机轻量智能避障感知模组和无人机双向四目感知相机稳定量产供货中。
2025-05-06 15:11:281515
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论