无人飞行器自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。而旋翼式飞行器与固定翼飞行器
2018-01-29 07:08:01 6387
6387 
的。。。)他们选择了飞行器类的题目,我觉得飞行器类的题目是最难的,也是最简单的,其中的关键就是 “飞行控制器” 。 如果你想要从头到脚,从惯性数据采集、姿态检测、姿态控制到速度位置控制再...
2021-09-13 07:11:50
,作用是为飞行器提供足够的升力和推进力;(5)供电电池为整个飞行器提供电能,确保各个部分的正常工作;(6)传感器模块为飞行器提供姿态和高度等信息,是飞行器姿态控制系统的重要组成部分。由于本课题的研宄重点在于飞行器
2016-05-23 15:41:22
申请理由:在开发四涵道飞行器时,采用的STM32F4进行飞行控制算法编程,还没做过在嵌入式操作系统下的开发。知道致远电子的这个开发板免费申请活动,因此,想申请一块开发版,设计一个四涵道的飞行控制系统
2015-10-23 10:14:30
,并学习研究相关编程控制的实现。(2)主要任务是利用altium designer设计硬件控制系统,利用keil C编写改进相应的软件控制程序。(3)设计飞行器控制板1套,编写C代码5000余行,基本实现了飞行器各个传感器的功能。
2015-10-23 10:13:19
等6种基本运动状态,利用陀螺仪进行物体姿态检测,利用智能传感器技术和GPS全球卫星定位系统使飞行器在无人操控的情况下实现智能化自主导航、自动返航、地理围栏等功能。
2015-07-07 10:40:09
开发板连接在四周飞行器上,通过蓝牙模块,实时记录飞行器高度,姿态,运动等各项数据。简直就是飞行器的调试工作的好帮手。飞行器也可以用到开发板上的各项传感器。希望通过我的试用,发帖能和更多论坛的朋友学习交流
2016-03-23 13:47:47
的传感器都使用过,也有自己的驱动库,都容易上手项目描述:四旋翼飞行器飞行控制器===================# 功能* 由开发板的传感器(气压+六轴陀螺仪+磁力计+GPS)获取的数据,通过运行
2016-03-23 13:48:09
申请理由:一直在做四轴飞行器的设计,有着很好的开发经验,而这块开发板的传感器恰好符合我的需求项目描述:以stm32作为主控 六轴陀螺仪的到飞行器姿态 气压计获取飞行器高度 磁力机获取其方向 而蓝牙通过与手机连接通信 从而控制飞行器 姿态算法采用四元算法和互补滤波 控制直接用单级pid 简单暴力
2016-01-26 13:59:13
采集系统项目描述:1,首先实现小钢炮CANNON开发板板六轴陀螺仪的数据读取和滤波算法得出欧拉角2,实现蓝牙无限的在线PID调试3,实现I2C接口与MPU6050的通信4,实现使用串级PID算法控制飞行器姿态
2016-01-26 14:35:08
yaw,通过 PID 算法调节电机的转速与方向,实现对飞行器姿态控制。使用超声波传感器模块对飞行器高度进行测量,通过 PID 算法调节电机的转速,实现对飞行器高度控制,从而实现飞行器平稳悬停。原理概述
2014-12-30 15:26:11
控制在工业控制领域应用广泛,原理简单、鲁棒性好、可靠性高,科技人员在长期的工程实践中积累了大量的控制系统设计经验,在四旋翼飞行器姿态控制中,PID控制技术成熟,易于实现。因此,本项目基于PID控制的四
2018-10-24 17:24:21
想通过stm32来控制四旋翼飞行器来完成各种姿态以及遥控和自主飞行两种模式!
2015-05-12 11:36:12
等6种基本运动状态,利用陀螺仪进行物体姿态检测,利用智能传感器技术和GPS全球卫星定位系统使飞行器在无人操控的情 况下实现智能化自主导航、自动返航、地理围栏等功能。
2015-08-04 16:08:39
,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身
2015-08-11 10:00:45
小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在
2015-08-11 10:38:55
,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在
2015-08-11 10:30:35
(ST-LINK等),预留串口用于连接上位机进行PID调参4.使用者需具备一定电子基础以及四轴飞行器相关知识,工程并非打板焊接下载程序即可飞行,需进行动力分配、PID调参等5.PCB工程以外的问题,看小马哥
2022-06-08 14:56:47
本设计是基于STM32的四轴航拍器。以STM32为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加
2020-09-25 14:19:44
的姿态进行无线控制。系统主要包括蓝牙无线模块、手机APP软件、四轴飞行器以及其他相关的配件项目描述:项目已成功制造出在遥控器的操控下能平稳飞行的迷你型四轴飞行器,但遥控器太大,通过在飞行器上安装蓝牙无线
2015-10-09 14:16:12
申请理由:想做一个迷你四轴,利用手机蓝牙进行控制和姿态调整。在飞行器上安装蓝牙模块进行无线通讯。其次,想通过该套件对蓝牙相关开发有更深一步的学习,能够做到系统级设计。项目描述:利用蓝牙来对迷你四轴进行有效控制,通过手机端APP进行无线数据采集和姿态调整。
2015-10-09 14:16:19
图: 下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制. PID控制算法 先简单说明下四轴飞行器是如何飞行的,四轴
2019-07-14 05:00:00
该文介绍了人造金刚石生产过程数据采集及Fuzzy-PID功率控制系统研制,系统由基于RS485总线的嵌入式数据采集器/控制器和PC计算机组成。嵌入式数据采集/控制器由51单片机实现,采用C51语言
2011-03-09 13:09:41
四轴飞行器的结构是如何构成的?四轴飞行器的基本飞行原理是什么?一种基于四轴飞行器的双闭环PID控制算法
2021-05-19 06:20:42
,主要有:软件算法、微电子、模拟电子技术、机电一体化和自动控制理论等。所以,项目小组将其分析这个部分,一一攻克。飞行控制系统理论分析,建立数学模型,硬件选型及原理设计在研究四旋翼飞行器控制算法之前,首先
2019-04-05 07:00:00
四旋翼的旋翼对称分布,4个旋翼处于同一高度水平面上,他们的结构和半径都相同。通过改变四个电机的转速就可以实现升力的变化,从而控制飞行器的姿态和位置。1)当四个电机同时加速或同时减速时,飞行器会垂直
2021-09-13 06:54:55
四旋翼飞行器的动力学建模及PID控制
2017-04-02 14:00:51
四旋翼飞行器的动力学建模及PID控制
2015-06-20 17:05:05
单元,给出了飞行控制系统的硬件设计,研究了设计中的关键技术;由于采用贴片封装和低功耗的元器件,使飞行器具有重量轻、体积小、功耗低的优点;经过多次室内试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落
2013-11-28 09:29:12
是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。 控制航行姿态的依据就是航姿传感器输出的信号。航姿传感器
2019-02-18 15:02:22
打舵响应速度。1.1 姿态PID控制的改进通常,飞行器姿态控制为串级PID控制[7],控制流如图1所示。飞行器在悬停状态下,PITCH、ROLL的姿态角都应当为0,当飞行器做出追踪地面移动目标
2018-12-03 19:35:50
本系统由数据信息采集、数据信号处理、飞行姿态稳定和航向控制部分组成。系统选用瑞萨RX23TMCU单片机作为主控芯片,以STM32F103VET6为核心的飞控完成飞机自稳,通过超声波传感器来检测飞行
2021-09-02 09:01:26
、左右、顺时针和逆时针运动是通过姿态角(角度)来控制的,遥控器是用来设定目标姿态角的,只要测得的姿态与设定的目标姿态进行串级PID控制就可以使四轴飞行器稳定飞行了。所以做四轴最重要、最关键的就是姿态角
2015-08-03 21:46:50
`通过学习这个课程了解四周飞行器的原理,知其然并知其所以然。不光可以做四周飞行器还可以做智能家居系统、智能农业检测、智能物流仓储系统、安防监控系统、智能穿戴、智能机器人小车、无人机等项目。 一
2018-01-02 16:16:52
同样也会受到外界干扰,引入z轴加速度环可有效避免外界干扰造成的影响,增强了系统的鲁棒性。 四轴飞行器双闭环PID控制,如图3、图4所示。角度作为外环,角速度作为内环,进行姿态PID控制;当需要定高
2016-01-15 17:03:00
四轴飞行器的姿态算法 四轴飞行器能够做垂直运动,俯仰运动,滚转运动,偏航运动。 四轴飞行器运用姿态解算计算出空间三轴欧拉角。结构框架如图2所示,陀螺仪采样三轴角速度值,加速度传感器采样三轴加速度值
2016-01-15 16:54:12
里面有大飞行器姿态算法程序的资料
2014-08-07 09:15:39
允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。1 四轴飞行器的结构与基本飞行原理四轴飞行器结构主要由主控板和呈十字交叉结构的4个电子调速器、电机、旋浆组成,电机由电子调速器控制,主控板
2016-01-15 16:42:28
PID控制 4.1 双闭环PID控制 当四轴飞行器正常飞行时,突遇外力(风等)或磁场干扰,使加速度传感器或磁力传感器采集数据失真,造成姿态解算出来的欧拉角错误,只用角度单环情况下,使系统很难稳定运行
2018-07-14 12:26:59
基于STM32的四轴航拍器。以STM32为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波
2020-10-16 16:37:11
设计。Fuzzy-PID控制系统的实控结果表明,所设计的虚拟控制器对非线性特性较为严重的被控对象的控制,具有较强的自适应能力和鲁棒性,其控制品质优于常规PID控制器。参考文献 [1] 刘金琨.先进PID控制
2019-04-17 09:40:02
和对飞行器姿态的实时调整,从而达到稳定运行,本项目另一个亮点就是可通过无线通讯上位机对飞行器运行状态的实时监控。时间安排,分二个阶段:一个月内完成,前期pcb 板的设计和基于matlab 模型的运动仿真,后期整体电路的调试和基于SLH89F5162飞行控制系统的设计。
2013-10-17 10:11:09
模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,PID作为控制器,实现飞行,云台增稳等功能。具有灵活轻盈,延展性,适应性强好等特点。四轴航拍系统设计框图:
2020-08-25 09:14:53
针对现阶段三叶桨四旋翼飞行器平衡难以控制的问题该文基于STM32单片机设计了- -个三叶桨四旋翼飞行器该飞行器采用四元数转欧拉角算法和PID调节器实现了角速度与加速度到角度的转换。该飞行器利用
2019-03-19 11:43:59
基于互补滤波器的四旋翼飞行器姿态解算
2020-06-04 08:47:03
轴传感器、2.4G无线模块和电机~~~完成!真心不容易!!第三部:编程调试微型四轴飞行器,其实就是让你的PCB飞起来。我们只需要画PCB,通过程序控制让四个电机带动板子飞起来。嵌入式系统是一个整体
2015-07-10 16:12:01
文章目录一、系统组成模块1、上位机 (PC)2、遥控器系统3、飞行器机体系统3.1 接收遥控器无线数据, 并发送飞行数据到遥控器无线通信模块Nordic NRF24L013.2 采集传感器数据并进
2021-11-11 09:19:06
的基本技术指标包括:飞行器最大尺寸不超过15 cm,重量10~100 g,有效载荷1~18 g,续航时间20~60 min,巡航速度30~60 km/h,飞行距离1~10km
2021-09-13 08:29:01
本文描述了一个简易四轴飞行器系统的设计实现,整个方案分为遥控控制板各飞行控制板两部分,通过2.4G无线模块进行控制通信,飞控系统采用IMU系统获取姿态信息根据反馈控制算法进行电机控制从而实现飞行控制
2021-03-04 06:03:00
不久前笔者发布的是关于姿态解算的博客,这次笔者成功的设计了微型四旋翼飞行器,并对硬件和软件部分分别做了总结,还希望和网友共同讨论学习。涉及到了四旋翼飞行器、四元数姿态解算、欧拉角、PID控制、Bootloader、窗口滑动滤波等概念。
2021-09-13 08:58:35
小弟现在在用STM32的板子自己制作一个四轴飞行器,现在能采集姿态解算后得到了当前飞行器状态的欧拉角了,请问: 姿态融合遥控控制量和当前姿态的差值怎么计算?是计算欧拉角差值吗? 然后,遥控控制量和当前姿态的姿态融合采用什么方法融合? 最后,哪些参数需要输入PID算法中?在线等大神解救!!!
2015-08-24 16:27:26
用现在的智能手机控制飞行姿态,用单片机作为控制器,加一般的摄像头作为航拍,这样的四轴飞行器做起来难度多大,我准备的毕业设计,望各位大神指点
2014-02-24 13:25:05
在下想做一架自控四轴飞行器,求教程序设计和PID控制
2015-07-14 11:16:44
控制系统来解决。四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4
2016-08-06 15:19:13
飞行器相关技术要点本项目包括但不限于如下技术要点:● 了解多轴飞行的结构组成、组装以及飞行原理● 了解RTOS实时操作系统● 无刷电机的原理及PWM控制● 了解GPS的数据采集及解析方式,以及遥控器无线
2018-04-24 15:32:24
以ADAM-5510kW及外I/模块构成的温度控制系统为研究对象,设计一个基于MULITIPROG编程系统的Fuzzy-PID控制器,对温度采集和风扇转速控制模块
2009-03-17 11:05:07 30
30 本文将Fuzzy-PID 算法应用于电阻炉温度控制系统,阐述了Fuzzy-PID 控制器设计、硬件构成和软件设计,实现了一套温度采集和控制的设计方案。整个系统具有体积小、成本低、功能强、
2009-06-01 11:54:4550 本文设计了一种用于水下焊接机器人焊缝跟踪的复合FUZZY-PID 控制器,采用模糊控制和PID 并联的控制模式,在大的误差范围内采用FUZZY-PID 控制,进行快速响应调整,在小的误差范
2009-08-12 10:20:5623 针对锦纶聚合釜温度对象的特点,采用Fuzzy-PID 复合控制方式,实时进行温度控制,效果优于传统PID 控制。关键词:聚合釜;Fuzzy-PID 控制;温度控制Abstract: Fuzzy-PID control is appli
2009-08-15 09:13:1017 本文设计了一个自举飞行器的微机控制系统。结合动力学模型,讨论了飞行速度和迎角对飞机高度的影响及飞行航向的控制,阐述了飞机
2009-09-14 08:42:5214 陀螺仪是舰船上的重要组成部件,其性能的稳定对于舰船的控制至关重要。将Fuzzy-PID算法应用于陀螺仪温度控制系统,以MCS一51单片机作为温度控制系统的核心部件,采用模糊PID算法
2009-12-04 16:10:5726 小区供水系统水压调节有较大的滞后性,难以建立精确的数学模型。用传统的PID 控制难以获得满意的效果。采用Fuzzy-PID 控制既具有传统PID 的控制经验的优点,也有模糊控制的自适
2010-01-18 15:34:5626 常用的PID控制系统技术及仿真
本章主要介绍了单回路PID控制系统、串级PID控制、纯滞后系统的大林控制算法及其仿真结果。
2010-04-28 14:36:3852 模糊PID在电阻炉温度控制系统中的应用
针对电阻炉的特点,提出Fuzzy-PID控制算法,介绍了模糊PID控制器原理,并改进了Fuzzy-PID控制器算法。仿真实验表明该控制
2010-04-28 15:57:1668 研究车辆主动空气悬架的控制问题,在车辆主动空气悬的常规PID控制器的基础上,运用模糊推理对常规PID控制器进行参数在线修订,设计了基于单轮车辆主动空气悬架的Fuzzy-PID控制器,
2011-03-18 16:28:1424 研究一种基于TMS320F28335 DSP(Digital Signal Processor)的全数字飞行器控制系统的硬件设计,分析了其结构组成:主控制器电路、舵面位置检测电路和通讯等硬件电路设计。经过多次试验调试
2013-04-27 16:52:2268 四轴和多轴飞行器调PID平衡的绝招,需要的看看,免积分
2015-11-02 10:49:5846 An Application of 4-Rotor Unmanned Aerial Vehicle: Stabilization Using PID Controller四轴无人飞行器的应用——使用PID控制器实现稳定性
2015-11-30 10:48:3457 本文设计以 STM32 单片机为核心,先对姿态传感器数据进行滤波,然后进行姿态解算及互补滤波,之后通过遥控器指令对姿态进行串级 PID 控制,最后定高控制与姿态控制叠加来控制四轴飞行器的四个电机,来达到各种飞行的目的。在制作四轴飞行器过程中参数调试是个很重要的一步,本文也对此进行了详细的介绍和分析。
2016-04-13 14:39:3127 有利于四轴飞行器学习,对于PID的控制的理解很有帮助。
2016-05-09 15:22:317 backsetpping设计了位置控制回路和姿态控制回路,通过Matlab/Simulink仿真对所设计的控制器的有效性进行了验证。从仿真结果来看,该控制系统可使飞行器准确到达指定位置,并保持稳定。
2016-05-13 11:28:0524 滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现
2016-06-08 17:29:360 1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文
2016-08-23 17:56:0041 旋翼飞行器姿态控制对燃料晃荡扰动的抑制_刘佳琦
2017-01-08 11:51:410 旋转导向钻井系统Fuzzy_PID控制算法_陈苏
2017-01-12 20:08:012 改进PID的无人机飞行姿态角控制消颤算法_陆兴华
2017-03-19 11:41:393 从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三轴加速度得到漂移补偿和深度解算。 姿态的数学模型坐标系 姿态解算需要解决的是四轴飞行器和地球的相对姿态
2017-09-19 18:51:4237 高精度运动捕捉系统对四旋翼飞行器控制算法的研究具有重要意义。针对传统PID控制在出现较大速度变化率时,会输出很大偏差引起系统的振动,设计了一种不完全微分先行的改进PID控制算法,完成了四旋翼飞行
2017-11-02 11:48:577 为实现四旋翼精确高效的自主飞行,提出一种基于磁传感器的串级PID控制自主飞行系统。该系统硬件平台采用CPS接收机提供经、纬度,磁传感器提供航向角;软件上采用串级PID控制,外环为位置导航级,内环
2017-11-02 15:47:230 随着航空、航天工业技术的迅速发展,对飞行器的研制成本和研发周期要求越来越高,这促进了飞行器仿真系统的研制和开发。飞行仿真转台是一个高精度的随动系统,由精密机械台体和高性能的控制系统两部分组成。 作为
2017-11-16 11:20:087 本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁
2017-11-29 17:08:018182 内执行任务。因此四旋翼飞行器具有广阔的应用前景,吸引了众多科研人员,成为国内外新的研究热点。 本设计主要通过利用惯性测量单元(IMU)姿态获取技术、PID电机控制算法、2.4G无线遥控通信技术和高速空心杯直流电机驱动技术来实现简易的四轴方案。
2017-11-29 17:56:0116847 
本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿态和位置。能够实现飞行姿态的稳定控制,达到了设计的目的。
2017-12-23 15:24:367254 
针对目前大多数消费级六旋翼飞行器捷联惯性导航姿态解算rrI,低成本微机电系统( MEMS)器件易发散而导致的姿态漂移问题,提出了一种基于改进一阶互补滤波的姿态解算算法,利用MEMS传感器巾加速度计
2018-01-27 11:37:430 一、项目概述 1.1 项目摘要 四轴飞行器具有不稳定,非线性特性,姿态控制为四轴飞行器控制系统的核心。机械部分搭建四个具有对称结构的螺旋桨叶和驱动电机。电气部分则采用STM32为控制核心的惯性
2018-02-20 22:08:001928 陀螺仪是舰船上的重要组成部件,其性能的稳定对于舰船的控制至关重要。将Fuzzy-PID算法应用于陀螺仪温度控制系统,以MCS-51单片机作为温度控制系统的核心部件,采用模糊PID算法以及其他的软硬件设计,实现了一套温度采集和控制的设计方案。
2018-02-10 13:32:072469 本文基于四旋翼飞行器的工作原理和性能特点,设计了飞行器控制系统的硬件电路。系统包含微控制器模块、姿态测量模块、无线通讯模块、遥控器模块、电机驱动模块。系统能够为传感器参数测量、控制算法实现、无线通信等提供硬件平台,功耗低、可靠性高。
2018-05-24 16:37:0015163 
该文介绍具有代表性的基于Fuzzy-PID参数自整定的半导体激光器恒温控制系统的设计实现。温控系统本身为一个大滞后系统,纯滞后可引起系统不稳定,且半导体激光器的阈值电流对温度变化相当灵敏,因此
2018-09-25 14:59:005480 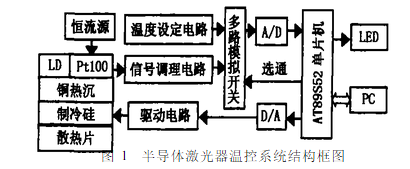
视觉测量方法在飞行器姿态测量中被广泛应用,然而远距离飞行目标成像纹理缺失会使传统光测手段应用受限。对测量中采用的追踪手段、图像分割技术以及测量方法进行研究,提出一种改进的小目标姿态测量方法利用高速
2021-05-26 17:09:399 基于STM32单片机的四旋翼飞行器控制系统
2021-06-11 09:54:54119 飞行器燃料温度控制系统设计方案
2021-06-22 15:21:2319 多旋翼飞行器设计与控制的坐标系和姿态表示
2021-09-14 09:23:320 在飞行器的控制中,姿态计算是至关重要的一步。姿态计算的目标是确定飞行器相对于参考坐标系的姿态,通常以欧拉角(滚转、俯仰和偏航)或四元数的形式表示。
2023-06-14 10:41:401253 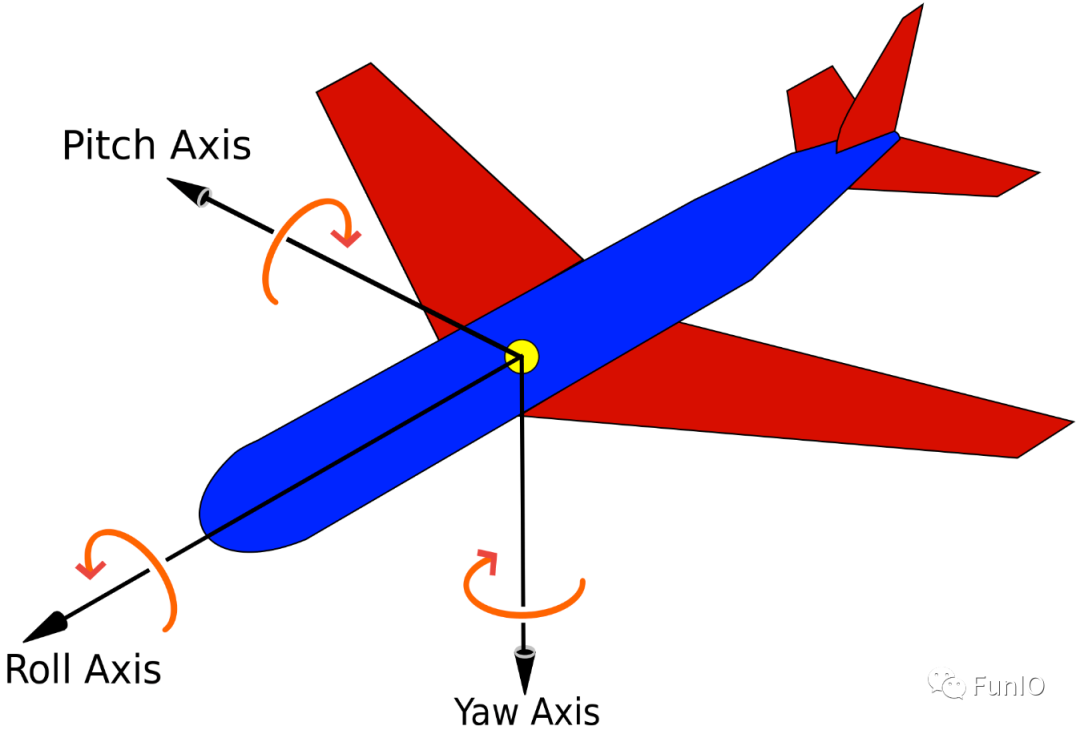
随着科技的发展以及军事战略思想的转变,无人飞行器在军事、民用领域具有广泛的应用前景和极其重要的现实意义。各国正在研制和开发各种性能独特的无人飞行器, 改造的核心就是飞行控制系统。
2023-06-19 16:35:09683 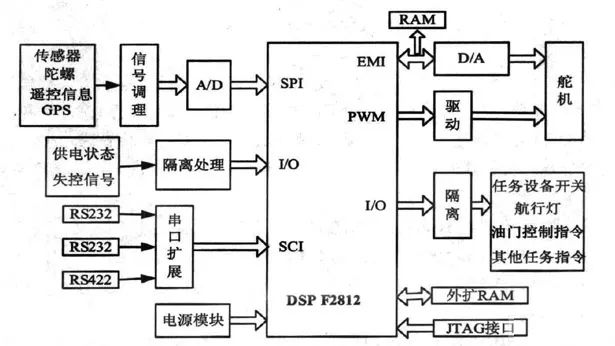
电子发烧友网站提供《单片机在超小型无人飞行器控制系统中的应用.pdf》资料免费下载
2023-10-12 10:41:290
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论