所示。二、要求1. 基本要求(1)四旋翼自主飞行器(以下简称飞行器)摆放在图 1 所示的 A 区,一键式启动飞行器,起飞并在不低于 1m 高度悬停, 5s 后在 A 区降落并停机。悬停...
2021-07-23 08:46:54
的扭矩(即锁尾),而四旋翼飞行器对角螺旋桨采用正反桨设计,从而不需要额外的机构进行“锁尾”。如图 1.1所示,4个螺旋桨呈十字形对称分布,1和2 号桨逆时针转动,而3和4号桨顺时针转动,但4个螺旋桨
2015-10-23 11:21:59
四轴飞行器.pdf 四旋翼飞行器设计与稳定控制研究.pdf (四轴飞行器)德国开源代码的理解.pdf 四轴飞行器研究与设计.pdf 一种基于STM32的四旋翼飞行器控制器.pdf
2018-06-28 11:03:39
多多支持四轴飞行器.pdf 四旋翼飞行器设计与稳定控制研究.pdf (四轴飞行器)德国开源代码的理解.pdf 四轴飞行器研究与设计.pdf 一种基于STM32的四旋翼飞行器控制器.pdf
2018-07-05 07:54:18
stm32六旋翼飞行器(PCB 程序 原理图)
2019-08-03 09:48:46
控制系统,因此飞行器的平台部分、电机及驱动系统和无线遥控接收系统均采用成品模块,仅对飞行器控制系统的软、硬件部分进行研宄和开发。为了最大限度的提高四旋翼飞行器飞行时的稳定性,其硬件安装注意事项
2016-05-23 15:41:22
后,我们准备用ARM的板子自己写程序让四旋翼飞行器飞起来,因为我们团队很需要这个板子。谢谢。项目描述:我们初步的计划是让飞行器先能平稳的起飞,我们的团队目前分两部分进行,一部分是调试飞行器,一部分人直接买好
2015-10-23 10:11:37
的推动作用。项目描述: 该项目是利用ARM开发板通过调节电机转速来控制飞行器飞行展开的,通过调节电机来实现四旋翼飞行器飞行姿态的控制,使其实现垂直运动、俯仰运动、滚转运动、偏航运动、前后运动、侧向运动
2015-07-07 10:40:09
的传感器都使用过,也有自己的驱动库,都容易上手项目描述:四旋翼飞行器飞行控制器===================# 功能* 由开发板的传感器(气压+六轴陀螺仪+磁力计+GPS)获取的数据,通过运行
2016-03-23 13:48:09
本帖最后由 wangjiamin2014 于 2015-1-6 14:22 编辑
项目名称: 基于MSP430F5529四旋翼自主飞行器团队名称:Dream团队成员:张航|肖勃|罗娟作品演示
2014-12-30 15:26:11
及社会各行业也得到了充足的运用。四旋翼飞行器融合了直升机与固定翼飞行器的优点,能在各种复杂地形飞行,具有垂直起降、可携带负载、方便控制的特点,不需要滑跑就能够方便的起飞和降落,使用方便且易于伪装,具有
2018-10-24 17:24:21
想通过stm32来控制四旋翼飞行器来完成各种姿态以及遥控和自主飞行两种模式!
2015-05-12 11:36:12
的推动作用。项目描述:该项目是利用ARM开发板通过调节电机转速来控制飞行器飞行展开的,通过调节电机来实现四旋翼飞行器飞行姿态的控制,使其实现垂直运动、俯仰运动、滚转运 动、偏航运动、前后运动、侧向运动
2015-08-04 16:08:39
申请理由:本人想利用MICOKIt主板和其配套的扩展板设计一个基于网的四旋翼飞行器,其扩展板上的WIfi模块、温湿度传感器、大气压传感器、九轴运动传感器等真好满足所设计的四旋翼飞行器的需求,我相信在
2015-07-31 21:17:45
申请理由:项目描述:之前使用430在研发四旋翼飞行器,在使用过程中发现430的在存在部分缺陷,不能达到精准的控制要求,因此想尝试stm32的板子,努力把自己的飞行器做的更好。拿到板子后我准备先学习一段时间,之后用板子开发一些新的项目,进一步完善自己对板子的了解,之后完成自己的飞行器。
2016-11-14 18:51:49
申请理由:为了满足四旋翼飞行器的设计要求,设计了微控制器为核心的控制系统和算法。首先进行各单元电路方案的比较论证,确定了硬件设计方案。四旋翼飞行器采用了固连在刚性十字架交叉结构的4个电机驱动的一种
2015-07-14 10:52:35
的预期功能是四旋翼能够实时传输画面,起飞时扔到空中可以自己调整平衡,具有一般飞行器的三向运动。具有低电压报警功能,同时具有自动充电和快速充电的功能。利用手机wi-fi对飞行器进行控制。
2015-07-08 21:49:30
申请理由:以往做过单片机c51的一些项目,现在正在做基于stm32的四旋翼飞行器项目描述:1,飞控使用stm32,用来控制各个传感器,通过mu6226来调整4个无刷电机的转速,从而控制飞机的飞行姿态。2,使用超声波测距检测4个方位的距离,实现自动避障。
2015-08-05 09:09:31
指定目的地项目描述:四旋翼飞行器(1)飞行器能够根据起飞前预置的指令起飞,飞离地面高度应超过cm,飞行距离(水平)应超过 xm,然后飞行器应能平稳降落(2)飞行器能够根据指定(键盘设定)的飞行高度及降落
2016-06-29 16:20:10
在正式开始记录微型四旋翼飞行器设计的学习笔记之前,感觉自己很有必要先给自己一个总结,也希望能够帮到更多的朋友少走弯路(虽然不知道帮助大不大)。去年九月下旬开始了微型四旋翼飞行器的学习与设计,在
2019-07-11 05:00:00
四旋翼飞行器,从这里开始,,简简单单,易懂
2015-11-03 21:06:05
利用原子家的四旋翼飞行器的飞行控制程序,和原子家的遥控器,改装使用更大功率的空心杯电机现在可以起飞,但是起飞油门过大,起飞瞬间就撞击到天花板现在用绳子绑住调PID发现只要旋翼旋转一会之后遥控器蜂鸣器就开始不停地蜂鸣看了遥控器的蜂鸣器相关的代码 没有发现问题 希望可以指点一下
2019-07-16 04:35:46
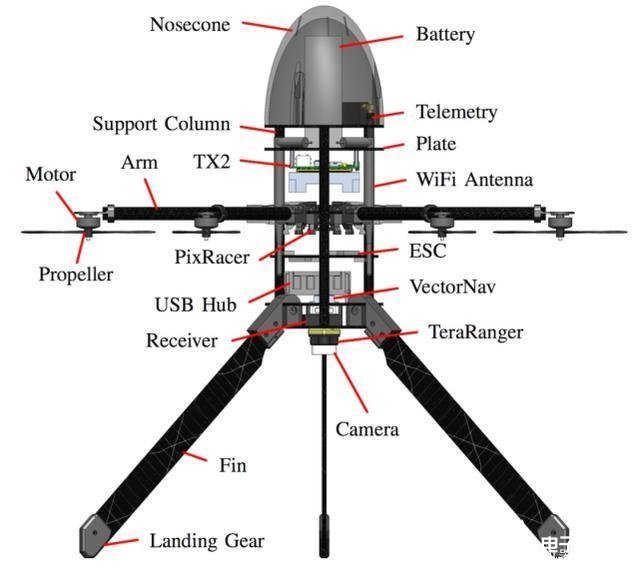
。飞行器的硬件结构以四旋翼飞行器为例,本节主要介绍四轴飞行器的硬件结构,首先附上一张飞行器的硬件结构图。图中红色的箭头代表信号的传输方向,黑色的先代表电路连接(供电),数...
2021-09-01 08:56:32
全国电赛的四旋翼飞行器有打算做的吗,题目到底是怎样的?谁能给个简单的解析啊,谢谢。。。另外推广一个群,是电赛的讨论群,里面有许多的关于电赛的资料哦,有兴趣的可以加入,验证信息是:电赛讨论
2013-08-29 20:32:16
推荐课程:张飞四旋翼飞行器视频套件,76小时吃透四轴算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post全国电赛的四旋翼
2013-08-29 20:50:38
旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态 保持能力高。小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且
2019-04-05 07:00:00
写在最前: 时间过得很快,转眼我就要毕业了,本科四年中,实验室的学长学弟都给我非常多的帮助,我也在很多开源项目中学习到很多。作为开源精神的受益者,我觉得也应该把自己的工作分享给大家。我一直对飞行器
2021-09-13 07:56:19
今年的全国电赛里面有一个是关于四旋翼 飞行器的题目,但是我在网上看到的这方面资料很少啊,所以想问问,了解一下这方面,有没有相关资料和比较专业的爱好者啊?
2013-09-14 18:08:15
四旋翼飞行器资料谁有。越全越好
2014-08-29 23:18:16
想制作一个四旋翼飞行器,求高手帮助!
2013-09-29 19:53:24
我是一个程序员,我学了基础的一些软件的知识,我现在想接触四翼飞行器的方面的知识的程序的编写,但是我不知道应该从何处基础的程序开始写起,有哪位做过飞行器的的大神给我指点一下我该从何基础的模块做起???万分感谢
2014-12-02 22:16:17
推荐课程:张飞四旋翼飞行器视频套件,76小时吃透四轴算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_poststm32最小
2015-11-02 18:16:20
的扭矩(即锁尾),而四旋翼飞行器对角螺旋桨采用正反桨设计,从而不需要额外的机构进行“锁尾”。如图 1.1所示,4个螺旋桨呈十字形对称分布,1和2 号桨逆时针转动,而3和4号桨顺时针转动,但4个螺旋桨
2015-10-23 11:30:24
四旋翼飞行器怎么样?
2021-12-20 07:35:56
四旋翼飞行器控制模型为便于建立模型,现对四旋翼飞行器进行以下假设:1、四旋翼飞行器是均匀对称的刚体2、四旋翼飞行器的质量和转动惯量不发生改变3、四旋翼飞行器的几何中心与其重心重合4、四旋翼飞行器只受
2021-09-15 07:22:37
本资料是四旋翼飞行器搭建说明书,讲述了各个器件的选型及一些基础知识,由很多精华资料组成。
2017-04-23 14:01:53
有木有四旋翼飞行器电路的?
2014-05-15 20:01:23
四旋翼飞行器的动力学建模及PID控制
2017-04-02 14:00:51
四旋翼飞行器的动力学建模及PID控制
2015-06-20 17:05:05
在这次的四旋翼飞行器题目中平衡部分是不是只有用陀螺仪,敢问各位高人是否有其他高招?
2013-09-04 16:52:57
四旋翼飞行器的基本组成有遥控器、飞控、电调、电机和机架,还有其他组件比如:正反桨叶、电池、GPS、夜航灯 和防撞圈等其他物品。今天,创客集结号重点详细讲解电调相关的内容。1.为什么需要电调?电调
2019-06-28 04:35:59
四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制
2013-11-28 09:29:12
四旋翼飞行器结构和原理+四轴飞行diy全套入门教程基于STM32的四旋翼飞行器视频教程推荐课程:张飞四旋翼飞行器视频套件,76小时吃透四轴算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2019-01-14 22:06:30
四旋翼飞行器设计(1
2017-06-10 10:52:48
是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。 控制航行姿态的依据就是航姿传感器输出的信号。航姿传感器
2019-02-18 15:02:22
四旋翼飞行器设计的稀有资料,下载请点击:https://www.elecfans.com/soft/study/ms/2015/20150828382057.html
2015-08-28 16:33:51
学习做四旋翼飞行器的参考资料,PCB和控制程序
2023-09-26 06:54:52
推荐课程:张飞四旋翼飞行器视频套件,76小时吃透四轴算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post有电调制作的详细
2012-08-08 22:17:37
四旋翼飞行器资料
2014-06-06 20:06:41
四旋翼飞行器追踪地面移动目标控制策略研究四旋翼飞行器对地面移动目标的追踪在军用、民用及商业化应用中发挥着越来越重要的作用[1],对敌军车辆、坦克实时跟踪并侦查,以获取敌军行踪;对灾后的人员搜救,以
2018-12-03 19:35:50
四旋翼的旋翼对称分布,4个旋翼处于同一高度水平面上,他们的结构和半径都相同。通过改变四个电机的转速就可以实现升力的变化,从而控制飞行器的姿态和位置。1)当四个电机同时加速或同时减速时,飞行器会垂直
2021-09-13 06:54:55
高度,再通过瑞萨芯片分析并向飞控传递信号来保持或改变飞行状态。利用无线信号发射接收装置来建立小车与飞行器之间的联系,完成配对后会有二极管和扬声器发出配对成功信号,再通过接收方位信号的改变来调整飞行姿态
2021-09-02 09:01:26
高难度飞行姿态的能力)。但是四旋翼系统自身是一个不稳定系统,极小的干扰(如风力等)均可使其失去控制直致坠毁。本文中是通过多个传感器(陀螺仪)随时的测量机身的各个运动学参量,然后经过微型数字信号处理器(RAM7)的处理运算来输出信号调整电机转速从而调整直升机的飞行姿态,使其保持平衡或者以某一姿态进行运动的。
2013-11-26 19:08:08
`四轴飞行器起飞时总会向一侧翻,这是什么原因啊,不是电机的旋转方向和螺旋桨的正反`
2016-04-30 19:58:47
四轴飞行器的结构原理 四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器(Quadrotor)是一种多旋翼飞行器。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局
2016-01-15 16:42:28
基于51单片机对四旋翼飞行器的控制,最关键是对飞行器稳定性的控制,其中用到角度传感器(陀螺仪也可以),其原理和单片机控制小车一样,通过角度传感器检测飞行器的飞行平稳,51单片机接收到信号控制电机速度
2013-08-29 22:49:00
本人最近参加虚拟仪器大赛,用FPGA实现飞行器的控制,该怎么写?求大神指教!
2014-11-19 19:09:51
本项目是制作一个四旋翼飞行器,作为青少年玩具或者四轴DIY平台具有很好的市场前景,项目简介如下:项目方案: 1、以SLH89F5162作为主控芯片,利用其
2013-11-16 11:34:13
基于STM32四旋翼飞行器的数据采集模块硬件电路,,急需要这个电路图。。
2017-03-13 20:44:56
四旋翼飞行器 (1)飞行器能够根据起飞前预置的指令起飞,飞离地面高度应超过cm,飞行距离(水平)应超过 xm,然后飞行器应能平稳降落 (2)飞行器能够根据指定(键盘设定)的飞行高度及降落地点(方向
2016-06-06 13:13:48
针对现阶段三叶桨四旋翼飞行器平衡难以控制的问题该文基于STM32单片机设计了- -个三叶桨四旋翼飞行器该飞行器采用四元数转欧拉角算法和PID调节器实现了角速度与加速度到角度的转换。该飞行器利用
2019-03-19 11:43:59
基于stm32的四旋翼飞行器
2015-07-13 13:38:32
,可能前面的路困难重重,所以选择了stm32平台和四旋翼飞行器这两个方面。我现在是一名机械专业的学生,大二上学期刚学完,混过了一年半,在学校的机器人实验室带了一年了,因为自己的惰性学到的东西有点少
2016-02-05 21:15:40
基于互补滤波器的四旋翼飞行器姿态解算
2020-06-04 08:47:03
基于无迹卡尔曼滤波的四旋翼无人飞行器姿态估计算法_朱岩
2020-06-04 08:48:36
多旋翼飞行器学习笔记二、机架设计2.1布局设计1·机身基本布局·交叉型:目前常用的是X字型布局,因为:(1)机动性更强;(2)前视相机的视场角不容易被遮挡。·环形:·与传统交叉型机架相比,其刚性更大
2021-09-02 06:59:50
北航多旋翼飞行器设计与控制详解
2019-07-11 07:30:00
翼飞行器实质上是属于直升机的范畴,需要由动力系统提供四个旋翼的旋转动力,同时旋翼旋转产生的扭矩需要进行抵消,因此本着结构简单控制方便,选择类似双旋翼纵列式加横列式的直升机模型,两个旋翼旋转方向与另外
2016-12-23 23:20:13
多旋翼自主飞行器(C题)
2015-08-12 07:57:05
本帖最后由 *** 于 2015-8-12 08:47 编辑
多旋翼自主飞行器(C题)超有用论文
2015-08-12 08:41:45
四旋翼的工作原理是什么?四旋翼飞行器是由哪些部分组成的?如何去实现一种四旋翼飞行器的设计呢?
2021-11-11 08:01:28
四旋翼自主飞行器是由哪些模块组成的?如何去实现一种四旋翼自主飞行器的设计呢?
2021-11-12 06:20:09
本文将详细展示如何在Matlab中建立四旋翼飞行模型,能正确对飞行器在力和力矩作下的线运动、角运动进行6DOF仿真。
2021-09-15 07:46:14
带防撞圈的四旋翼飞行器(外形尺寸:长度≤50cm,宽度≤50cm;续航时间大于10分钟)这种飞行器去哪找呀!在淘宝上找不到合适的呀
2013-08-29 15:08:01
不久前笔者发布的是关于姿态解算的博客,这次笔者成功的设计了微型四旋翼飞行器,并对硬件和软件部分分别做了总结,还希望和网友共同讨论学习。涉及到了四旋翼飞行器、四元数姿态解算、欧拉角、PID控制、Bootloader、窗口滑动滤波等概念。
2021-09-13 08:58:35
我想做一个四旋翼飞行器,该用什么驱动器和电机呢?
2016-01-21 15:57:44
系统分成控制模块和执行模块。控制模块是一个遥控器,安芯一号作为主控芯片。按键来控制飞行器的运动,包括悬空,上升,下降,水平4个方向的运动。单片机直接与无线串口模块进行通信,把指令直接通过串口抛数据给
2013-11-03 23:25:05
有了这个,四旋翼飞行器的制作就简单多了,推荐课程:张飞四旋翼飞行器视频套件,76小时吃透四轴算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2014-01-10 17:38:13
如何去实现基于STM32F103CBT6微型四旋翼飞行器的硬件设计呢?如何去实现基于STM32F103CBT6微型四旋翼飞行器的件软设计呢?
2021-12-20 07:07:33
四旋翼飞行器(B题)补充说明注意:http://www.nuedc.com.cn/news.asp?bid=5&sid=20&id=672四旋翼飞行器(B题)补充说明文章日期
2013-09-04 15:13:46
1.选题的背景与意义1.1四旋翼的发展背景早在1907年,由Breguet-Richet发明的世界上第一家四旋翼飞行器升空。四旋翼飞行器通过平衡4个螺旋桨的升力及力矩来实现稳定盘旋和飞行。但由于构造
2021-08-06 08:22:07
所示。二、要求1. 基本要求(1)四旋翼自主飞行器(以下简称飞行器)摆放在图 1 所示的 A 区,一键式启动飞行器,起飞并在不低于 1m 高度悬停, 5s 后在 A 区降落并停机。悬停...
2021-07-27 06:11:26
今年多旋翼自主飞行器的题目是否允许使用openmv或pixy这样的摄像头模块有人知道吗?还有就是是否允许使用光流传感器?
2018-07-23 04:34:39
最近要学做一个自主飞行器,题目如图:飞行器是现成的,飞控板是用STM32F4系列芯片。由于从未涉及过四旋翼和ARM芯片,一时不知从何下手。求各位大神指点,该从哪里开始学。
2019-04-02 06:36:19
有没有什么APP可以直接通过wifi控制四旋翼飞行器
2019-04-19 00:26:18
改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时
2016-08-06 15:19:13
正在加载...
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论