 电子发烧友App
电子发烧友App


四轴飞行器是一种大规模使用的无人驾驶飞行器 (UAV) 或无人机。这些用于救援行动、交付、监视、防御、医疗和农业等用途。无人机的主要优点是体积紧凑,易于控制。在本文中,我们将学习如何在电机、飞控和底盘的帮助下,使用 KK2.1.5 飞控设计四轴飞行器(无人机)。
什么是四轴飞行器?
四轴飞行器是一种带有 4 个电机的多旋翼无人机。Quadcopter 使用电子传感器和控制系统稳定其飞行。四轴飞行器有两种类型,即。1- Plus 配置四轴飞行器和 2- 交叉配置四轴飞行器。在本教程中,我们将设计一个 X 形的四轴飞行器。两种形状都是稳定的,但在向前飞行中,四轴飞行器在向前飞行中需要偏航控制输入。两种配置的偏航控制权限相同,但在交叉配置的情况下,俯仰和横滚控制权限最多可增加约 30%。四轴飞行器依靠加速度计和陀螺仪等电子传感器和控制系统来稳定飞行。
建造四轴飞行器所需的组件
框架:
框架是无人机的基本结构,所有部件都安装在一起。框架应该是刚性的,以便最大限度地减少电机的振动。它由一个中心板组成,电子元件和四个臂连接到中心板上。在下面给出的图像中,我们可以看到四轴飞行器的框架。

我们将使用宽度为 450mm 的 f450。它由玻璃纤维和耐用的尼龙制成。它有两块板,一块板带有集成PCB,因此我们可以直接焊接电调。F450 手臂经过加固以防止任何损坏;我们可以轻松地将电机放置在手臂的边缘。我们使用的是 m2.5 尺寸的螺钉,它们是内六角螺钉或内六角螺钉。
电机:
我们在这里使用了无刷直流电机 (BLDC)。直流电机由用于驱动轴的线圈和磁铁组成,轴上有一个刷子,负责切换线圈中的功率方向。无刷电机没有这些刷子。它们在电机的中心有线圈,固定在支架上。它们包含许多安装在外侧圆柱体上的磁铁,该圆柱体连接到旋转轴上。所以,线圈是固定的。这意味着,电线可以直接连接到它们,因此不需要刷子。无刷直流电机以更高的速度旋转,并且比直流电机使用更少的功率(在相同的速度下)。此外,不会因电刷过渡而造成功率损失。在下面给出的图像中。我们可以看到 1000KV BLDC 电机,它有三个输入线。
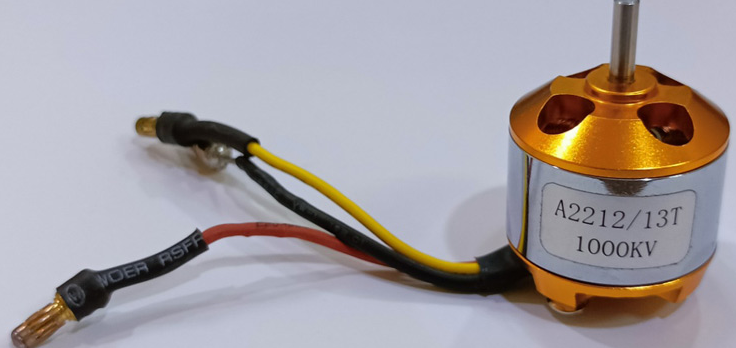
无刷电机带有 Kv 等级。这意味着如果我们在没有任何负载的情况下向电机提供 V 电压,电机将以给定的 RPM(每分钟转数)旋转。
转速 = Kv * V
在这里,我们使用四个无刷电机,额定电压为 1000 Kv。
螺旋桨:
螺旋桨安装在每个无刷电机的顶部。螺旋桨有多种尺寸和形状。我们使用的是 (10*4.5) 尺寸的螺旋桨,这意味着它的直径为 10,螺距为 4.5 英寸。直径给出面积,但间距给出有效面积。如果我们在相同直径的情况下使用更高螺距的螺旋桨,螺旋桨将产生更大的推力并提升更多的重量,但它也需要更多的动力。高转速可提供更高的速度和机动性,但举起的重量更少。

如果我们想用重物稳定飞行无人机,那么我们应该使用旋转较少但提供更大扭矩的电机,应该使用高螺距螺旋桨。要驾驶四轴飞行器,我们需要 1:2 的重量和推力比。
功率(瓦)= Kp * D 4 * P * RPM 3
在哪里,
Kp = 对于中型螺旋桨,Kp 值为 1.2
D = 螺旋桨直径
P = 间距
螺旋桨的位置在无人机飞行中起着重要的作用。我们需要注意螺旋桨的形状,因为螺旋桨可能看起来相同但实际上并不相同,它们可能是彼此的镜像,就像我们的手是彼此的镜像但它们不一样。
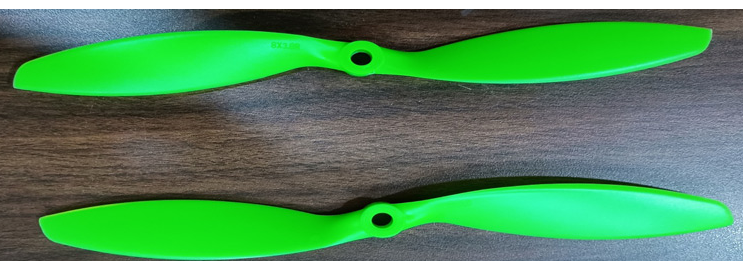
在上图中,螺旋桨看起来相同但两者不同,两者都是彼此的镜像。螺旋桨应该像这样旋转,它们应该向下舀空气,因为这会导致无人机飞起来。如果螺旋桨向上推动空气,那么无人机将被推到地面。我们应该放置我们的螺旋桨,以便它们向下舀空气。螺旋桨平面应与电机旋转方向一致。如果电机顺时针旋转,则平面应在前面。
ESC(电子调速器)
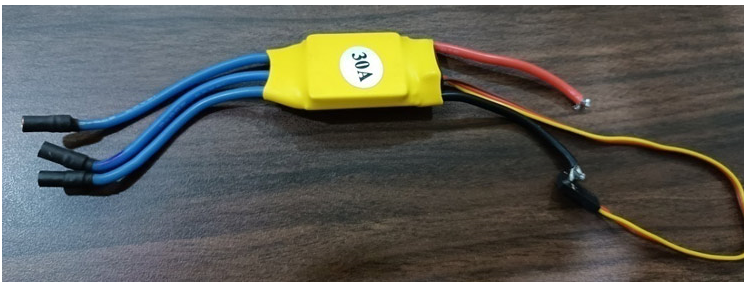
无刷电机是三相电机,因此不能使用直流电源运行。电调连续产生三个频率信号,相位不同但可控,以保持电机转动。它具有用于电机的电池输入和三相输出。我们在这里使用 30Amp ECS。在下图中,我们可以看到 ESC 的外观。我们将为四种不同的电机使用四个 ESC。
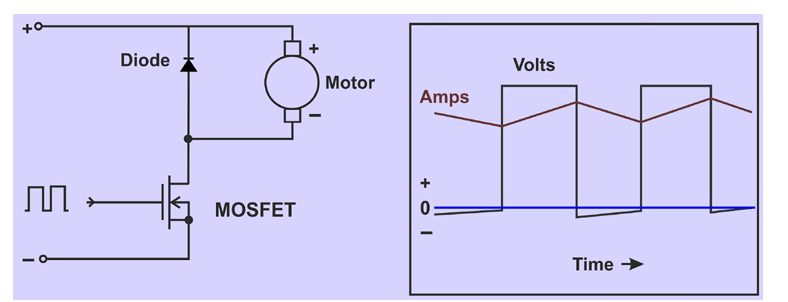
控制器通过脉冲宽度调制 (PWM) 每秒大约 2000 次切换连接到电机的连接和断开连接。MOSFET 晶体管用作开关而不是机械开关。开关速度快,电机检测不到。如果连接了 24V 电池,则只有一半时间,电机将电池视为 12V 并以半速运行。开关速度也会影响电机电感,从而使电机电流不断流动。但是,该电流仅从电池流出一半的时间,因此电池电流将是电机电流的一半。在下图中,我们可以看到 ESC 的内部电路图及其电流(安培)随时间的响应。
电池
锂聚合物 (LiPo) 电池通常用于四轴飞行器,因为它重量轻且额定电流大。在这里,我们使用了 3 节锂聚合物电池。单节锂聚合物电池可提供高达 3.6 V 的电压。
LiPo 电池容量为 2200mAh,11.V(3 芯)电压和 30C 放电率。在下图中,我们可以看到 2200mAH 锂聚合物电池。这是 2200mAH 锂聚合物电池的图像。

LiPo电池有两个特性参数:
1- 容量-它告诉电池中存储了多少能量。
2- 放电率——也称为 C 率,以 C 单位表示。它代表电池可以放电的速率。可以从电池汲取的最大电流 (I max ) 是放电率和容量的乘积。
I max = 电池容量 * 放电率
我们使用的是放电率为 30C 的电池。
所以,我最大= 2200mAh * 30C = 66 安培
这意味着 2200mAh 30C 3S LiPo 可以提供高达 66 安培的最大电流。
发射器和接收器:
发射器作为用户的控制器工作。用户只能使用此发射器操作四轴飞行器。它基于无线电通信。接收器安装在无人机上,接收器带有天线,在天线的帮助下,它与发射器进行通信。这是一个完全无线的通信。发射器向接收器发送信号,接收器将该信号发送到飞行控制器。我们在这里使用 FLYSKY 发射器和接收器。该发射器的射程为 1500 米,但如果我们在磁场干扰较高的地方使用该发射器,则发射器的射程会减小。您可以查看 有关 FLYSKY FS-i6 发射器和接收器的所有信息,以实现轻松的无人机控制 文章了解此发射器和接收器的所有功能。

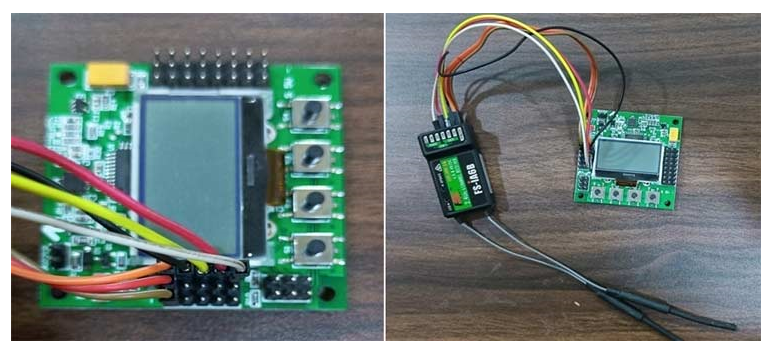
KK2.1.5 飞控
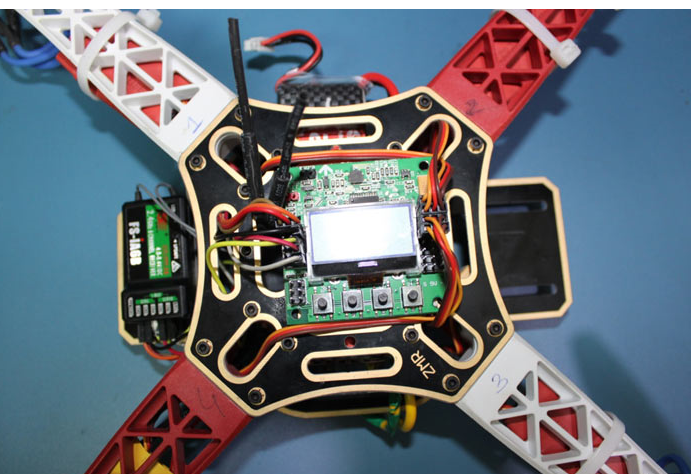
KK2.1.5为飞控;飞行控制器也被称为无人机的大脑,因为它控制了无人机的所有操作。KK2.1.5内置了ATMEL mega 664PA IC。它是基于 8 位 AVR RISC 的微控制器,具有 64k 内存。它具有内置的加速度计和陀螺仪,6050 MPU和自动水平功能。板子右侧有8个电机输出,这里接电调。它有5个控制输入;这些输入通过接收器连接。它的中间还有一个 LCD 显示屏,它将作为无人机的用户界面。其工作电压为 1.8V 至 5.5V,输入电压为 4.8-6.0 V。
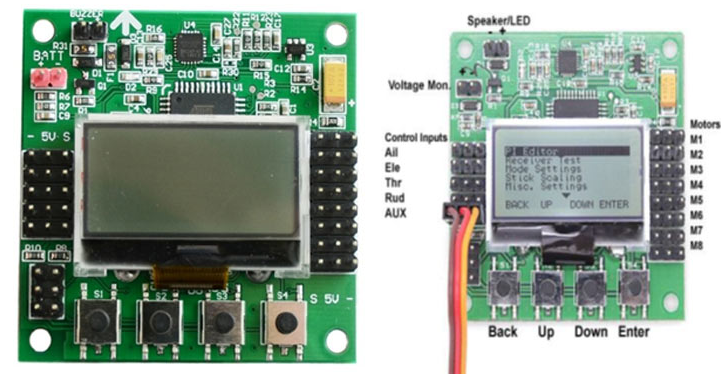
Kk2.1.5 用于在飞行过程中稳定四轴飞行器,为此,它接收来自陀螺仪的信号(滚动、俯仰和偏航)并将这些信号发送到处理器(ATMEL mega 664PA),然后将控制信号传递给 ESC 和这些信号的组合指示 ESC 对电机转速进行微调,从而稳定飞行器。Kk2.1.5 还使用来自接收器的信号,并通过副翼、升降舵、油门和方向舵用户需求输入将这些所有信号一起传递给处理器 (ATMELmega664PA)。处理后,此信息将发送到 ESC,ESC 进而调整每个电机的旋转速度以控制飞行方向(偏航、右、左、上、下、后、前)。在下面的视频中,我们一一解释了上述所有组件。
四轴飞行器的飞行控制力学
四轴飞行器的运动是通过改变 4 个电机中每个电机的相对推力来控制的。在这里,我们使用的是 X 形的四轴飞行器。在这个四轴飞行器中,位于同一对角线上的电机沿同一方向移动,顺时针方向 (CW) 或逆时针方向 (CCW)。如果我们乘坐汽车,那么我们可以前、后、左或右,但是当我们谈论飞行系统时,我们不会这么说。飞行系统有不同的术语,即。偏航、滚动和俯仰。
在了解四轴飞行器的飞行动力学之前,我们需要了解四轴飞行器角运动的三个主要参数,即偏航、横滚和俯仰。
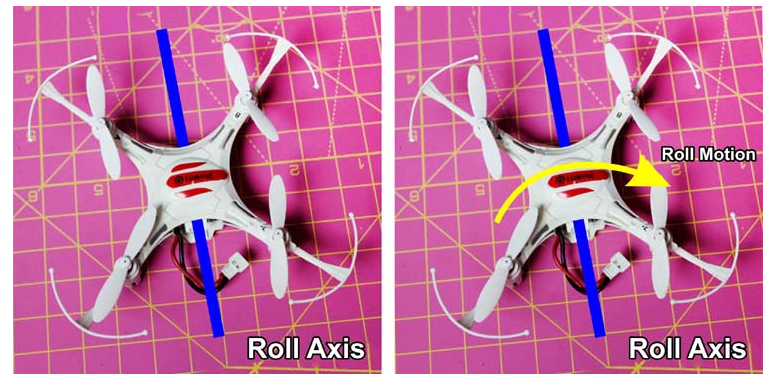
卷:
无人机后部到无人机前方的轴称为角色轴,围绕该轴的旋转称为角色运动。这种运动也称为副翼。在下面给出的图像中,我们可以看到滚动运动。
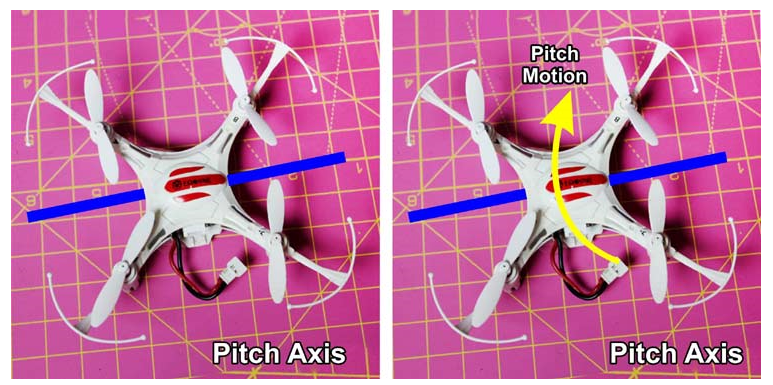
沥青:
从无人机左侧到无人机右侧的轴称为俯仰轴。绕该轴的旋转称为俯仰运动。它也被称为电梯运动。在下面给出的图像中,我们可以看到俯仰运动。
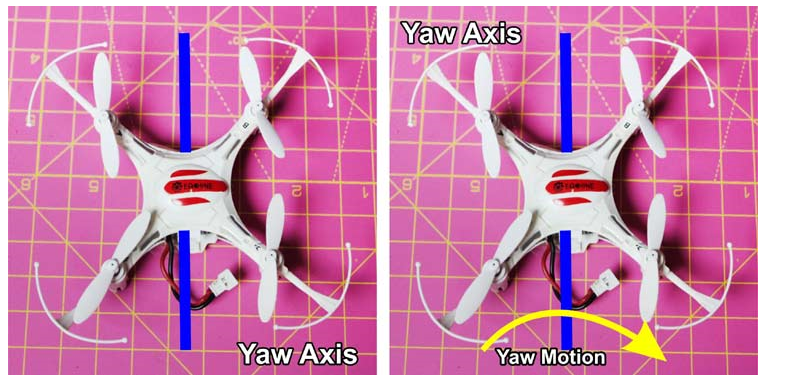
偏航:
从无人机顶部到无人机底部的轴称为偏航轴。绕该轴的旋转称为偏航运动。它也被称为船舵。在下面给出的图像中,我们可以看到偏航运动。
借助下面给出的图像,我们可以一起理解所有三个动作。
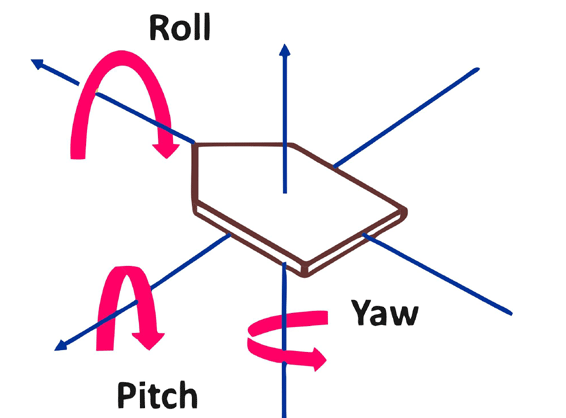
这些不是横向运动本身,而是沿三个不同轴的旋转。甚至横向运动也是沿这些轴旋转的结果。要了解无人机的控制,我们首先需要了解作用在无人机上的不同力。如果推力 = 重量 (mg),那么四轴飞行器将保持平衡。如果推力 》 重量 (mg) 则无人机将向上飞行,如果推力 《 重量 (mg) 则无人机将向下飞行。
向上时,推力的方向就是无人机运动的方向,所以要改变无人机的运动方向,我们需要改变推力的方向,这就是无人机运动的逻辑。
前后方向运动:
如果我们想向前移动无人机,我们需要产生向前的推力分量。这是通过增加稀有电机的功率和降低前置电机的功率来实现的。如果我们想使无人机向后移动,我们会降低稀有电机的功率并增加前电机的功率。
左右方向运动:
为了将无人机向左移动,我们生成向左方向的推力分量。这是通过增加右侧电机的功率和降低左侧电机的功率来实现的。要将无人机向右移动,我们增加左侧电机的功率并降低右侧电机的功率。
四轴飞行器的偏航运动:
对于偏航运动,事情会变得有点棘手,当我们想在 CW 方向上偏航无人机时,我们将增加逆时针螺旋桨的功率,由此产生的反作用扭矩将使无人机顺时针方向偏航。如果我们想在 CCW 方向上偏航无人机,我们将增加顺时针螺旋桨的功率,由此产生的反作用扭矩将使无人机逆时针方向偏航,因此为了控制四旋翼的运动,我们控制功率我们给它的马达。
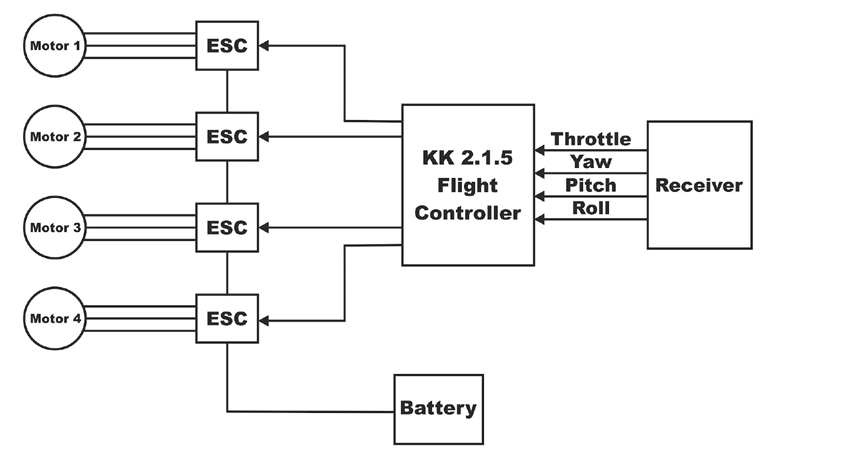
四轴飞行器框图
正如我们在下面的框图中看到的,所有电机都通过电调与KK2.1.5连接。加速度计和陀螺仪显示在 KK2.1.5 板之外,但它内置在板本身内部。接收器直接与KK2.1.5板连接。在下图中,我们展示了四轴飞行器的框图
四轴飞行器的飞行动力学
要驾驶无人机,我们只有 4 种类型的输入。这四个输入是通过向电机提供或多或少的功率来控制的。
这里有 4 个电机,电机 1 和 3 沿 CW 方向旋转,电机 2 和 4 沿 CCW 方向旋转。Ꞷ 1, Ꞷ 2 , Ꞷ 3, Ꞷ 4 分别是电机 1、电机 2、电机 3 和电机 4 的角速度。l 是对角相对的电机和 Z 轴垂直于表面的距离。
每个电机在 Z 方向提供向上的推力。
推力 α Ꞷ 2
推力 = KꞶ 2
其中 K 是升力常数。
每个马达在 Z 方向提供向上的推力。
Z方向的力(向上方向):
F z = K (Ꞷ 1 2 + Ꞷ 2 2 + Ꞷ 3 2 + Ꞷ 4 2 )
X、Y、Z方向的扭矩:
T x = K * l * (Ꞷ 4 2 - Ꞷ 2 2 )
T y = K * l * (Ꞷ 3 2 - Ꞷ 1 2 )
T z = B * l * (Ꞷ 1 2 - Ꞷ 2 2 + Ꞷ 3 2 - Ꞷ 4 2 )
其中 B 是阻力常数
F x 和 F y 呢?
在四轴飞行器中,我们可以完美地诱导旋转运动。我们可以在 X、Y 和 Z 方向上产生扭矩,但我们只能在 Z 方向上产生力。我们不能直接诱导 F y 和 F z 。电机不能在 X、Y 方向产生力。
如果我们想沿 X 和 Y 方向移动四轴飞行器,那么我们需要将四轴飞行器绕 X 轴或 Y 轴旋转一点角度,然后一个分力将沿 X、Y 和 Z 轴作用。 我们可以通过旋转四轴飞行器间接诱导 X、Y 方向的运动。
因此,控制四轴飞行器有点复杂,因为我们不能直接在 X 和 Y 方向上运动,我们需要先引起旋转,然后力将在 X 和 Y 方向上作用。
我们有控制变量或四个输入
F z , T x , T y , T z
但是我们必须控制六个参数或六个输出
X、Y、Z、θ(滚动)、Փ(俯仰)、ψ(偏航)
在使用倒矩阵方法进行变换时,我们得到,
Ꞷ 1 2 = (1 / 4k) * F z – (1 / 2kl) * T y – (1 / 4b) * T z
Ꞷ 2 2 = (1 / 4k) * F z – (1 / 2kl) * T x + (1 / 4b) * T z
Ꞷ 3 2 = (1 / 4k) * F z + (1 / 2kl) * T x – (1 / 4b) * T z
Ꞷ 4 2 = (1 / 4k) * F z + (1 / 2kl) * T x + (1 / 4b) * T z
KK2.1.5飞控设置与调试
Kk2.1.5多旋翼液晶飞控板基于ATML644 PA。电路板右侧有 8 个输出,我们将使用其中 4 个输出直接连接 ESC。我们将使用四轴飞行器,所以我们只使用了四个输出引脚。
ESC的连接:
输出引脚每行有 3 个引脚。最右边的所有引脚都接地。所有中心引脚均为 Vcc(5 伏)。所有第一次的引脚都是信号。将所有四个电调线连接到 KK2.1.5 板的前四个输出引脚。电调与 KK2.1.5 板的连接如下表所示。

在下图中,我们可以看到电调与 KK2.15 的连接。在这里,我们只连接了 1 台电调,这样我们将所有 4 台电调都连接到 KK2.1.5 板。

接收器连接:
输入引脚位于 LCD 显示屏的左侧。这里有 5 个连接,这些引脚将与 Receiver 连接。接收器引脚和 KK2.1.5 输入引脚应按如下方式连接:

我们将接收器的第一个通道(CH1)用三根连接线连接,其余通道将仅通过单根线连接,因为其他通道无需连接 Vcc 和地。根据上表,接收端连接应如下图所示。

根据上表,KK2.1.5 板端连接应如下图所示。
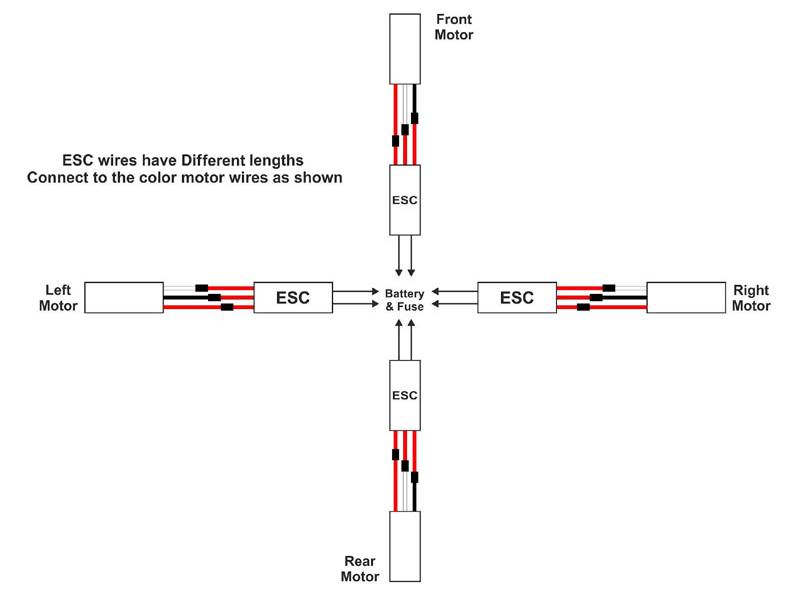
BLDC 电机设置:
电机一和三应逆时针旋转,电机二和三应逆时针旋转。我们将使用飞天发射器设置所有电机的方向。首先将电池连接到电源连接器。我们将第一个电机 ESC 连接到接收器的通道 3,通道 3 总是被限制。现在,打开发射器并稍微移动油门,然后电机将旋转。现在,观察电机的方向。如果我们看到方向相反,我们将电机和ESC连接的端线反转。现在,再次移动油门,我们可以看到电机正在向所需方向旋转。现在,对每个电机重复相同的过程。电机和电调都有 3 根线,我们将如下图所示连接电机和电调。
KK2.1.5 设置
设置 KK2.1.5 板时,首先保持发射器开启,并确保接收器与发射器绑定。KK2.1.5板的底部有四个按键S1、S2、S3和S4。使用这些按钮,我们将与 LCD 显示屏进行交互。
步骤 1 首先按 S4 进入菜单,然后进入加载电机布局,然后选择四轴飞行器 X 模式并在 X 模式下设置四轴飞行器。在此处检查所有电机方向。

Step-2 接下来是 ACC 校准,为此我们必须将四轴飞行器放置在平面水平面上,并选择用于校准加速度计的 Acc Calibration。点击S4,这是自动校准。
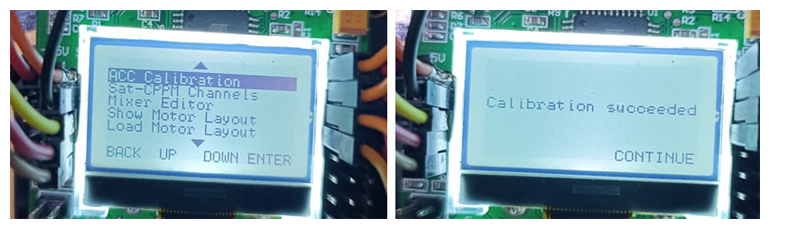
Acc校准结束后,我们就可以拔掉电源,重新供电。它将在 LCD 显示屏上显示安全,这意味着它已从错误变为安全。

步骤 3 现在,转到 PI 编辑器。在这里,我们要设置副翼(Roll)、升降舵(Pitch)和方向舵(Yaw)的P(增益/限制)和I(增益/限制)。P增益是代表灵敏度和责任的比例增益。更高的 P 意味着更清晰的控制,更低的 P 意味着更柔和的控制。
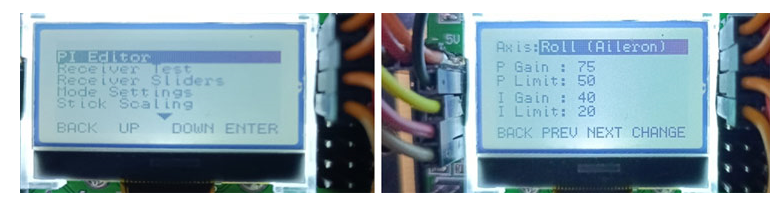
I 是积分增益,表示它保持高度的程度。完成 PI 设置后,进入模式设置。

Step-4 在模式设置中,将自身电平设置为AUX。

步骤 5 现在进入其他设置,在这里我们将设置警报 1/10 伏特。
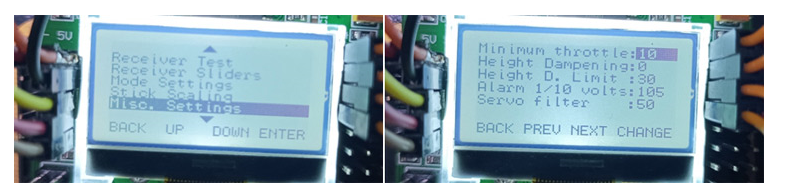
要将警报设置为 1/10 伏,我们需要进行以下计算。
11.1 伏的 3 芯锂聚合物电池使用每个电池 3.60 伏的值来表示空电池,然后将值(以 1/10 为单位)设置为(3.6 * 3 * 10 = 108),当电源电压降至 10.8 伏时警报会响起。
Step-6 现在,我们进行电调校准。首先将遥控器调到最小,然后将油门调到最大,按住S1和S4开关,然后将电池连接到四轴飞行器,现在我们会听到两声哔哔声,我们将油门放下,导致哔哔声。 这样,校准过程就结束了。
Step-7 为四旋翼布防,将油门保持在左侧,一旦四旋翼布防,我们就可以飞行四旋翼了。
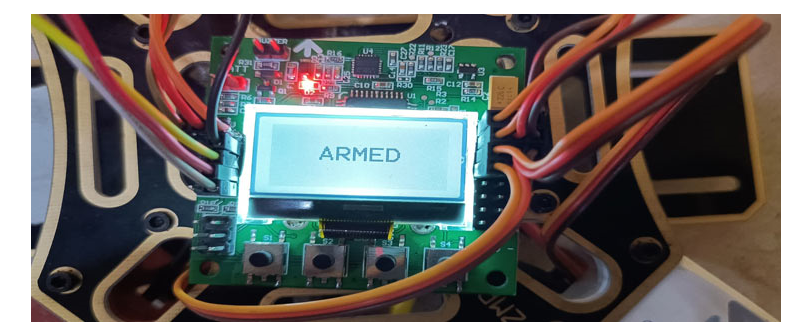
现在四轴飞行器已准备好飞行。将油门保持在右侧。
四轴飞行器中的 PI 调优
极低的 P 增益:
四旋翼很难控制,四旋翼整体稳定性较差。当飞行器响应时,控制输入感觉不精确且缓慢。当四旋翼飞行时,很容易过度纠正命令,飞行器会很紧张。
非常高的市盈率:
四轴飞行器会出现左右摆动。四轴飞行器很容易获得或降低高度,但很难保持给定的高度。四轴飞行器会以低频抖动和振荡。
正确的 P 增益:
我们可以简单地操作四轴飞行器,它会以稳定的方式飞行。它可以快速优雅地起飞,在一个地方盘旋。如果我们想飞四轴飞行器杂技,我们应该在稳定飞行值的基础上稍微增加P设置,在稳定飞行值的基础上稍微降低I设置;如果我们想要平缓平稳的飞行,我们应该在稳定飞行值的基础上稍微降低 P 设置,在稳定飞行值的基础上稍微增加 I 设置。
比例增益系数(Kp):
Kp对于相对稳定的飞行起着重要作用。Kp 确定来自陀螺仪的板载控制和用户摇杆输入之间的混合。在增加 Kp 值时,四轴飞行器将变得更加敏感,对角度变化有反应,并且可能会以高频率振荡。降低 Kp 值时,四轴飞行器将变得迟缓且难以保持稳定。
积分增益系数 (Kc)
Kc 增加了角位置的精度。例如,当飞行器受到风的干扰并且它的角度位置改变了 10 度时,理论上它会记住角度改变了多少,并会尝试返回 10 度。它适用于不规则的风和来自电机的湍流。当 Kc 值较高时,四旋翼将开始有缓慢的反应,它会降低 Kp 的效果,但当 Kp 值设置为高时,四旋翼开始以较低的频率振荡。
在本教程中,我们在 KK2.1.5 飞控的帮助下设计了一个四轴飞行器。在这里,我们已经解释了从设置控制器到调整控制器。在下一部分中,我们将解决一些问题,以使四轴飞行器平稳飞行。







 工商网监
工商网监
评论