 电子发烧友App
电子发烧友App


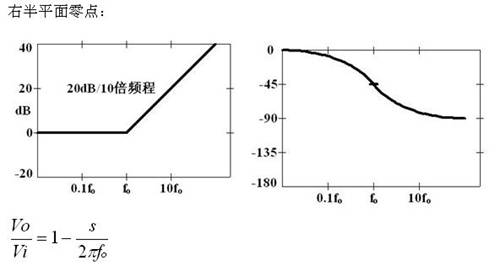
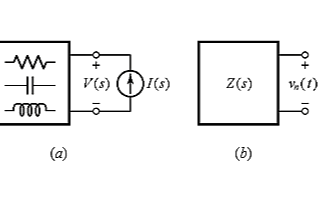
关于右半平面零点的影响,cmg在控制环路设计中,多次提到,也有很多人问,所以我就斗胆起个头,抛砖引玉,不正确的地方各位高人多多指点.
nyquist定律:闭环系统稳定的充要条件是:F(s)在s平面的右半部无零点
1. 为什么RHPZ(right half plane zero)存在于Boost和 Flyback电路中
此两种拓扑结构中,在offtime时间,只有储能电感向负载供电,而在ontime时间内,VCC只向电感储能,不提供负载能量.这点与buck拓扑不同,buck拓扑在ontime期间,VCC向储能电感储能的同时,还向负载提供能量.


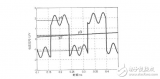
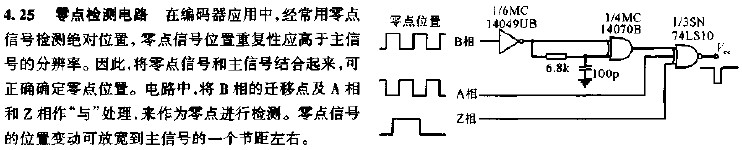
2. RHPZ的物理表现,由于电感电流连续,整个ontime + offtime = 1 cycle.如果负载电流增加,反馈环节会使占空比增大,这样ontime 会增加,相应的offtime时间会减小,由于负载电流完全有offtime的电流平均值提供,这样输出的平均电流会减小,负载电压会降低.
在电流图形上表现为面积A > B .
(面积A为由于offtime时间减小而减小的电流面积,B为ontime增加,电流峰值增大,导致次级电流增大的电流面积.)
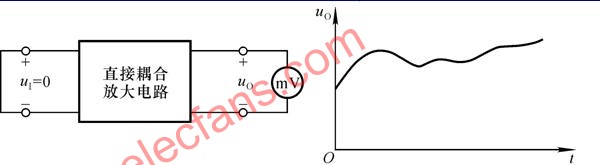
所以RHPZ在物理上的表现为:随着负载电流的增加,输出电压首先会下降的比较多,然后几个开关周期才能恢复过来

3. 在小信号模型传递函数上,flyback的CCM模式为二阶系统,DCM模式为一阶系统,这是因为DCM模式在offtime期间,电感向负载释放能量, 其电流斜率为di/dt=V/L,与外界负载无关,这样就表现为内阻非常大,相当于一个电流源,所以为一阶系统.而CCM模式下,电流波形为一个梯形,其直流部分值是与负载紧密相关的,所以为二阶系统.
4. 为什么RHPZ无法补偿:RHPZ在GAIN 坐标上贡献+1的斜率,但在PHASE坐标上为90度滞后.如果用极点补偿(gain 为-1,phase为90度滞后),则总的gain为一直线,(0斜率),但phase已经滞后了 180度,已经不满足稳定条件,同样即便使用左半平面零点也是一样(gain为+1,phase为超前90度)
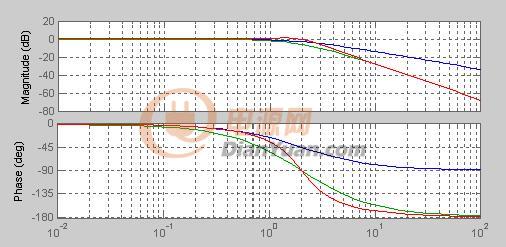
5. Matlab 分析RHPZ在时域的表现,为什么要使反馈带宽远小于RHPZ
靠近原点的RHPZ产生undershoot,也就是上面分析的次级电压会先下降再随后上升,但在RHPZ的频率离原点比较远,(在反馈环路中离0dB频率比较远时),其影响相对来说已经比较小.




以上零极点的取值为 -1 -2 +2 只是为了说明的方便,实际系统中可能是好几百K,但效果是一样的.
参考:
1. control loop cookbook by Lioyd H.Dixon
2. switch power supply design by Abraham I. Pressman
3. TOPSWITCH控制环路分析 by cmg















 工商网监
工商网监
评论