 电子发烧友App
电子发烧友App


该项目描述了如何设计能够测量低至千分之三度的角度的定制倾斜计子系统。
这是我们在 AAC 上设计的项目和子系统之一,旨在尝试向您展示新的思想、想法和技术。
该项目创建了一个可用于精密仪器的测斜仪子系统。通过这种设计,我可以记录低至百分之一度的角度,并且知道它是准确的。我可以将其到千分之一度,并以 99.999999% 的置信度知道它与实际倾斜值的千分之三度之内。
项目的终构建
该项目创建了一个用于科学仪器或机械的单轴数字机械倾斜仪。该电路板采用了来自不同制造商的 IC,并演示了您可以将其纳入设计中的几种不同技术。
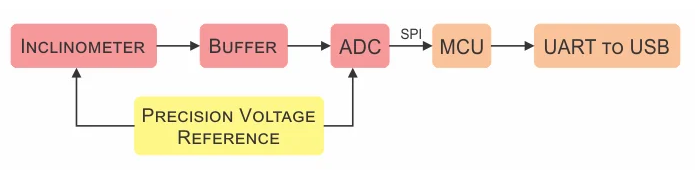
一个非常简单的项目框图
本文是系列文章中的篇,介绍了使用 muRata SCA103T-D04(一款基于 ±15° MEMS 的倾斜计 IC)创建精密倾斜计电路所需的一些机械和电气注意事项。未来的文章将更详细地介绍原理图设计、PCB 布局注意事项以及器件操作分析。
1. 选择组件
以下是复制我的设计所需的主要组件的简化 BOM:
SCA103T-D04 ±15°倾角仪
LTC2380IDE SAR ADC
LT1027LS8 精密电压基准
设计如何运作?
该设计以SCA103T-D04 ±15° 倾斜计 IC为中心 。出于披露的目的,让我提一下,为了本文的目的,muRata 向我发送了这个倾斜仪。遗憾的是,我得知(为时已晚)该特定组件将被停产。muRata 网站目前声明 SCA103T-D04 的“购买日期”是 2019 年 6 月 15 日。
倾斜计的传感器输出通过 Analog Devices AD8244单位增益放大器发送至 Linear Technology(现属于 Analog Devices)的LTC2380IDE 逐次逼近寄存器 (SAR) 模数转换器( ADC)。我选择了 24 位 SAR ADC 而不是 16 位器件,因为我深知它在物理上和实际上不可能解析到 0.00000001°。我将目标设为 17-18 位,即 0.0001°。这是一个有点昂贵的选择,因此如果有人想稍后使用 16 位 ADC 重新创建此设计,您会很高兴知道我选择了具有可用引脚兼容的 16 位版本。
然而,我只会制作其中一块板,所以我宁愿拥有比我怀疑我能够使用的更多的分辨率,也不愿拥有太少的分辨率。此外,我选择的 ADC 具有集成的数字平均滤波器,因此应该可以通过重复测量从测斜仪中统计出超过 16 位的分辨率。
ADC 值由 TI MSP430 微控制器读取。TI 的MSP430微控制器是我在过去几个项目中选择的 MCU。我本可以选择MSP430FR2433来访问额外的 GPIO 线,但该项目不需要其他引脚。MSP430FR2633具有电容式触摸引脚功能,允许在未来的控制板上实现外部校准按钮。
然后该值被传递到 Silicon Labs CP2102N UART 至 USB 转换器。
关于倾角仪
muRata SCA103T-D04 ±15°模拟高性能差分1轴倾角仪的模拟分辨率为0.001°(16位),输出噪声密度为0.0004°/√Hz,偏移温度依赖性为±0.002°/° C。
集成的 11 位 ADC 通过 SPI 引脚提供直接数字转换输出。每个内部传感元件提供 0.5-4.5VDC 范围内的单端输出,并保留 0-0.5VDC 和 4.5-5.0VDC 来指示错误情况。
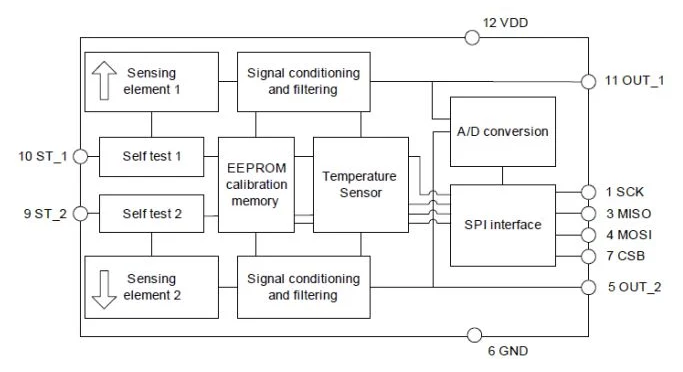
数据表中的 SCA103T-D04 功能框图
IC 内部有两个相同的加速度计,沿同一轴排列并指向相反的方向。输出旨在为差分放大器或差分输入 ADC 供电。这种差分测量技术有助于降低噪声并消除共模测量误差。
muRata 的数据表指出,该设备能够以 0.001° 的分辨率识别角位移,相当于约 14 位。低温依赖性(可校正)和低噪声密度(不可校正),以及 muRata 在设备的整个工作范围内发布差规格的政策,使我相信性能可能比在某些情况下指定的要好。
作为“艰难休斯”,如果可能的话,我想突破上限。
2、方案设计
成功项目的步是创建功能原理图设计。这涉及研究所涉及 IC 的引脚排列并进行适当的连接。
我逐个组件地接触我的董事会。
倾斜计:由于 SCA103T-D04 的自检功能的设置方式,我在 BOM 中添加了另一个 IC,以防止两个引脚同时处于活动状态。
信号缓冲器和模数转换器:我需要考虑如何通过各种滤波器和放大器路由信号以确保信号完整性。
微控制器:为 MSP430 分配引脚将在固件写入阶段进行。
您可以在有关如何设计功能原理图的文章中阅读这部分设计过程的更详细说明。
3. PCB 布局
将原理图转变为电路板布局时需要考虑多种因素。在这种情况下,我特别需要确保电压参考 IC 的机械隔离和热隔离。我还决定采用保护环以限度地减少泄漏电流。
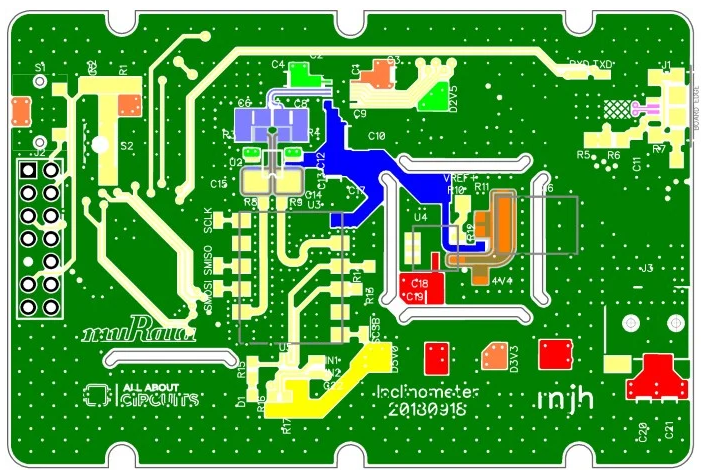
板的顶层
确定组件的布局、走线的长度和路径以及噪声排除设计对于该设计都很重要。
我创建了一个 4 层板,其中两层外层用于组件和信号,一层用于接地,一层用于混合电源。
板层按顺序排列
可能产生大量热量的组件(LDO、MCU)被放置在板的底部,组件的顶部可以机械连接到铝制 PCB 载体上的突出部分。其想法是在 IC 产生的过多热量有机会扩散到 PCB 的其他部分之前通过金属将其消散。
我在另一篇文章中详细介绍了设计该 PCB 时的具体考虑因素。如果您想了解有关此过程的更多信息,包括我的电路板切口如何用于隔离电路板内部免受热和应力损坏,请阅读有关我如何将原理图转换为 PCB 布局的信息。
4. 烧写固件
对定制板进行编程的步是考虑哪些引脚连接到哪些设备。
为了给自己提供尽可能多的信息,我在代码中添加了 ASCII 连接图。此步骤不是必需的,但我发现将图表作为源代码中的参考很有帮助。
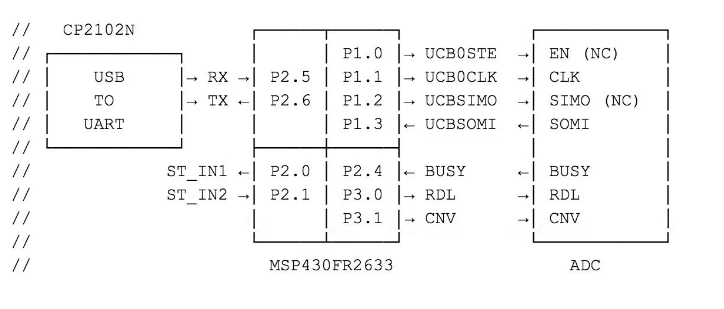
我在代码中包含的引脚分配表示以供参考
将我们的注意力转向 MSP430,在配置之前您无法使用微控制器执行任何操作。为此,您必须确定引脚、时钟源、电源模式等。这就是使用高质量评估套件值得您投入的每一分钟和每一美元的地方。就我而言,我之前有足够的 MSP430 经验,使程序接近正确,并且论坛贡献者的一些帮助使我能够快速完成任务。
除了引脚分配等之外,考虑到该子系统能够收集多少数据,我还需要考虑如何管理数据。为了实现这一目标,我选择以二进制值的形式查看串行监视器中的数据,以便快速评估我的设备是否遇到噪音。
如果您想了解有关此主题的更多信息,包括寄存器是什么以及如何使用它们等信息,请查看我关于MSP430 固件设计的文章。
5. 机械考虑:设计外壳
0.001° 的分辨率意味着 PCB 一侧的高度改变约 1 ?m(接触点之间的距离约为 9.5 cm)。这是一个非常小的位移,基本上保证了每次调整板固定器内的板后都必须执行数字校准。
我没有在板支架内调整板,而是选择将板牢固地固定到板支架上并调整支架。
如果我选择按照数据表的建议使用简单的数字校准,我可能会失去办公室里“Hard-way Hughes”的绰号。由于我的“街头信誉”受到威胁,我选择通过安装在板一端的差动驱动螺杆机构将机械调节纳入板支架中,并在板的另一端安装两个额外的 M3 抛光盖形螺母。董事会持有人。
您可以在以后的文章中看到我对设计外壳的机械考虑因素的完整分解。
6. 开始生产
请记住,AAC 板用于教育目的,因此我们通常只对每个板进行旋转。您对制造要求和原型订单的体验会有所不同。
您可以在下面我的设计文件:
测斜仪_201809131600.zip
7. 表征器件
现在我们的倾角计已经完成制造,我们可以开始表征我们的设备。
我们闪亮的新板(显示在其板架中)
噪音
我关心的电路部分是电压参考,所以这是我首先关注的测量。这是如果我重新制作 PCB 的话我会重新设计的电路部分。我将电路板连接到示波器并开始测试。
在测试过程中,我发现了一个“问题”——重复的异常现象。
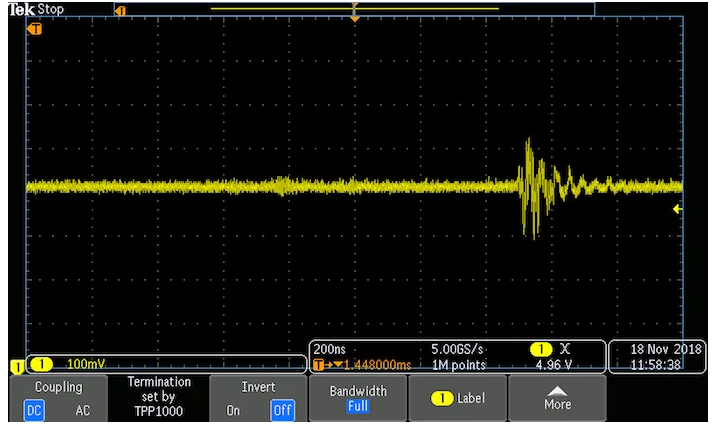
示波器捕获显示有问题的偷偷摸摸的“打嗝”
如果该板用于大规模生产,这肯定是我需要解决的一个问题,特别是因为我目前无法判断噪音是良性的还是表明存在更严重的情况。然而,这种特殊的噪声事件似乎并未对设备的性能产生负面影响。
这是一个很好的例子,说明设计的下迭代将包括更多测试点,包括同轴测试连接,以实现更完整的测试和测量。
有关我如何创建测试环境以及噪声密度如何影响组件选择的更多信息,请查看我以后关于该主题的文章。
8. 数据分析
总而言之,我需要一种方法来查看和分析倾角仪收集的数据。我在固件部分提到了这一点,但下一步是处理数据。我选择使用 Mathematica 来创建此设置:
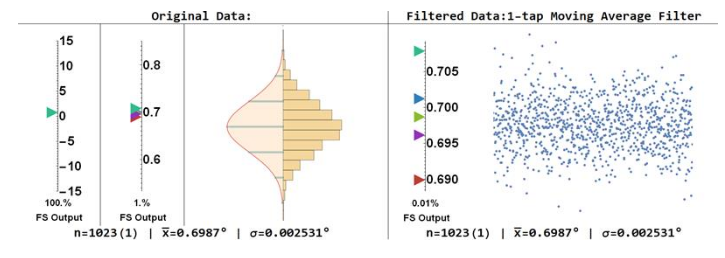
然后我进行了试验以确定我是否可以解释和表示数据集。
如果您热衷于统计和数据建模,您可以在我即将发表的文章中详细了解我在数据分析方面的冒险经历,我在其中描述了这些试验。















 工商网监
工商网监
评论