 电子发烧友App
电子发烧友App


摘要:控制技术的数字化是开关电源的发展趋势。相对于传统的模拟控制技术,采用数字控制技术的功率因数校正(PFC)具有显著的优点。详细讨论了采用数字信号处理器(DSP)作为控制核心时的设计事项和方法,最后提出了数字控制技术有待解决的问题。 关键词:数字控制;数字信号处理器;功率因数校正;开关电源 引言 电力电子产品的广泛使用,对电网造成了严重的谐波污染。这使得功率因数校正(PFC)技术成为电力电子研究的一个热点。功率因数校正的目的,就是采用一定的控制方法,使电源的输入电流跟踪输入电压,功率因数接近为1。传统上,模拟控制在开关电源应用中占据了主导地位[1]。随着高速度,廉价的数字信号处理器(DSP)的出现,在开关电源中使用数字控制已成为发展的趋势[2][3][4][5][6]。 本文对实现PFC的模拟控制方法和数字控制方法进行了比较,介绍了采用数字控制的独特优点。详细讨论了采用数字信号处理器作为控制核心时的设计事项和方法。 功率因数校正的模拟控制方法已经使用了多年,也有现成的商业化集成电路芯片(比如TI/Unitrode的UC3854,Fairchild的ML4812,STmicroelectronics的L6561等)。图1(a)是基于UC3854的模拟控制电路结构方框图。电路采用平均电流控制方式,通过调节电流信号的平均幅度来控制输出电压。整流线电压和电压误差放大器的输出相乘,建立了电流参考信号,这样,这个电流参考信号就具有输入电压的波形,同时,也具有输出电压的平均幅值。PFC的模拟控制方法简单直接。但是,控制电路的元器件比较多,电路适应性差,容易受到噪声的干扰,而且调试麻烦。因此,模拟控制有被数字控制取代的趋势。 图1(b)是PFC的数字控制原理框图。类似于模拟方法,使用了两个控制环路:电压环和电流环。电压环通过调节平均输入电流来控制直流总线电压,电流环控制交流输入电流使之跟踪输入电压。控制过程由DSP完成,通过DSP的软件来实现电流和电压的调节。 1)通过软件调整控制参数,比如,增益和带宽,从而使系统调试很方便; 2)大量控制设计通过DSP来实现,而用模拟控制器是难以实现的; 3)在实际电路中,使用数字控制可以减少元器件的数量,从而减少材料和装配的成本; 4)DSP内部的数字处理不会受到电路噪声的影响,避免了模拟信号传递过程中的畸变、失真,从而控制可靠; 5)如果将网络通信和电源软件调试技术相结合,可实现遥感、遥测、遥调。 数字控制器包括一个电流环和一个电压环。对于电流环,将指令输入电流减去输入电流iL,n所得的电流误差ie,n输入到电流环数字PI控制器。最后,将控制器输出的占空比Dn输入到PWM产生单元,控制开关S的通断。对于电压环,PFC变换器的输入电导期待值ge,n与输入电压vin,n相乘,得到指令输入电流iL,n*。 2 数字控制的实现 在实现一个电力电子系统的实际数字控制器时,需要考虑大量的因素,比如,控制处理器的选择,采样算法和采样频率的确定,PWM信号的产生,控制器和功率电路之间的连接,硬件设计和控制算法的软件实现等。这些因素都会对系统的性能产生很大影响,需要细心设计和实际实验。 在设计控制系统时,微处理器的选择需要考虑很多的因素,诸如功能,价格,硬件设计的简单性和软件支持等。现在,已经有多种内嵌有PWM单元和A/D转换等控制外设的DSP芯片可供选择(比如TI的TMS320C2XX系列,AD的ADMCXXX系列,Motorola的DSP56800等)。以TI公司的TMS320C2XX系列为例,它拥有很多良好的特性,比如,多个独立可编程的时钟,50ns指令周期,16位并联乘法器,两通道多路复用的10位A/D转换器,还有片内RAM和EEPROM等。这使得它成为实现功率变换系统数字控制的首选。如果需要进一步降低成本,可以选择STmicro?controller的8位DSPST52x420。 在设计数字控制器时,选择合适的采样频率起着重要的作用,因为,采样频率直接影响到可完成的功能和数字控制系统的可靠性,因此,它应该在合成控制器之前确定。对于更高的系统带宽要求,应该使用更高的采样频率。然而,采样频率的提高也对字长和数字控制器的计算速度提出了更高的要求。工程设计的目标总是使用更低的采样频率来达到给定的设计要求。 由于Boost变换器的输入电流含有大量谐波。因此,采样频率必须远高于开关频率,输入电流才能不失真地还原。由于开关频率已经很高(>20kHz),要采用更高的采样频率是困难的,而且,处理器也来不及处理相应的控制计算任务。而使用比较低的频率将产生频谱重叠。虽然可以在A/D转换前加入前置滤波,但是,这样又需要更高的带宽。因此,采样频率选择与开关频率同步,这样,开关纹波就成为隐性振荡,不会在还原信号中出现。这种采样方法在一个周期中只采样一次,称为SSOP(singlesamplinginoneperiod)方法。采用这种采样方法时,有一个采样点确定的问题。电感电流在开关的瞬间存在电流尖峰,如图3所示。显然,应该避免在开关点进行采样,否则系统将不能正常工作。在PFC应用中,输入电流必须跟踪输入电压,而且输出电压要保持恒定,PWM信号将在一个大的范围内变动,因此,这个问题变得更加突出。 2.3 PWM信号的产生 为了叙述方便,定义一个开关周期的起点p,如图6所示。对大多数数字PWM单元来说,占空比的值应该在开关周期开始之前装载入寄存器,因此,控制变量的采样应该在p点之前准备好,以便控制算法的计算及时完成。这里采用平均电流控制,选择采样点,得到每个开关周期的输入平均电流测量值。 理想的采样点si和实际采样点sr之间有一个时间延迟τd。τd由两个原因造成,一个是在信号链中低通滤波器产生的相移,另一个是开关S的开关指令和实际开关动作之间的延迟。这样,留给处理器完成控制计算的时间就是τc。延迟τd和计算时间τc共同决定了反馈环路的延迟。
式中:Ts为开关周期。 使用顶点规则采样PWM方法产生开关指令。如图7和图8所示。对于输入信号u在平衡值附近的小偏移,顶点规则采样PWM的响应可以描述为 |gPWM(jω)|=cos(ωTo) (2) ∠gPWM(jω)=wTs/2 (3) 式中:To是稳态时开关导通时间的一半。 因为,期望的电流环的带宽在1kHz到10kHz之间(开关频率为50kHz),PWM的增益趋于统一。因此,顶点规则采样PWM的传输函数可以近似为
2.4 电流环和电压环的数字PI控制器 电压环和电流环都包括PI控制器。参看图1,一个数字PI控制器可以表达为 un=A0xn+A1xn-1+un-1 (5) 或者 gPI(z)=U(z)/X(z)=(A0z+A1)/(z-1) (6) 等效模拟控制器的传输函数是 gPI(s)=U(s)/X(s)=KPI(1+1/stPI) (7) 因为采样频率有限,当一个模拟转换函数采样生成离散时间函数时,如果模拟函数包含了频率高于1/2采样频率的分量,会发生重叠效应,如图9所示。 s=2/Ts(z-1)/(z+1) (8) 那么数字控制器的参数A0和A1和模拟等效参数KPI和τPI的关系为
3 结语 在功率因数校正领域,模拟PFC控制是当前的工业选择,数字控制是今后的发展方向。将DSP控制应用到功率变换器中有很多优点,比如降低了元器件数量和成本,适应性好,产品升级方便,开发周期短等。而且随着数字控制器的广泛应用,成本有潜力变得更低。使用DSP实现数字控制,需要考虑处理器的选择,采样算法,PWM信号的产生,控制器的设计等多方面的因素。 由于DSP刚刚开始应用于控制电源,对开关整流器件采用DSP控制的研究开展的还不多,使用DSP来控制电源也存在自身独特的问题。相对于专用的集成芯片,DSP的价格高昂,而且成熟的控制算法难以获得。有限的带宽和采样频率,离散效果和处理延迟,这些因素的存在使得实时控制系统的功能需要折衷考虑。 |

- 功率因数(38692)
- 控制方法(7617)


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
相关推荐
从6个问题解析功率因数校正
 15755
15755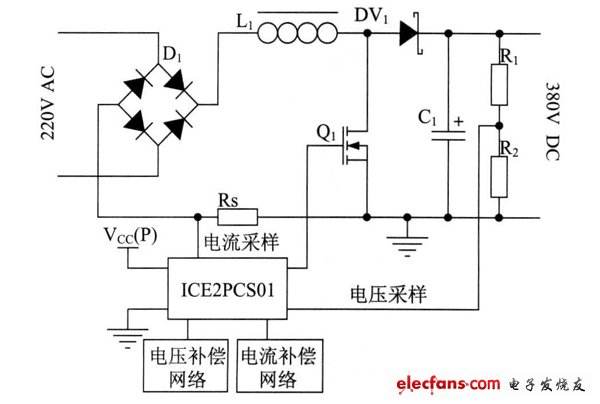
利用宽带隙半导体和数字控制设计更有效的功率因数校正电路
530
IR推出IRS2500S功率因数校正(PFC)控制IC
1760700W两相交错式功率因数校正转换器含物料清单和原理图
PFC功率因数校正与LDO低压差线性稳压器简介
功率因数的校正
数字控制的300W无桥功率因数校正转换器包括原理图,物料清单及PCB设计文件
数字控制的无桥300W功率因数校正转换器参考设计
数字控制真的会取代模拟控制,而成为PFC中的主流控制方式吗?
NCP1608是一款有源功率因数校正(PFC)控制器,专门用作交流 - 直流适配器
NCP1631控制交错并联功率因数校正器
UCC28019有源功率因数校正PFC控制器相关资料分享
pspice升压功率因数校正
【功率因数校正(PFC)手册】选择正确的功率因数控制器解决方案
为什么我们需要功率因素校正PFC?
什么是功率因数校正 PFC?
什么是主动式/被动式功率因数校正(Active/Passive PFC)?
关于电源的功率因数校正
具有功耗计量功能的两相交错700W功率因数校正转换器参考设计
史上最全PFC(功率因数校正)学习资料推荐
如何区别主动式功率因数校正?
如何通过DFF控制改善功率因数与THD
应用临界导通模式的有源功率因数校正控制器
无桥功率因数校正转换器
有源功率因数校正与单级功率因数校正的关系
有源功率因数校正技术介绍
有源功率因数校正电路和无源功率因数校正电路介绍
用于AC/DC系统的功率因数校正PFC控制器IC
L4981在门机电源功率因数校正中的应用
 55
55Boost型功率因数校正变换器的数字控制研究
28基于UCC28019的高功率因数电源设计
303单级PFC变换器的功率因数校正效果的研究
34先进的功率因数校正
38开关电源功率因数校正技术及功率级设计
46
一种新颖的功率因数校正芯片的研究
871

带非正弦波电流的新颖数字式功率因数校正技术
1051
单极隔离式功率因数校正(PFC)变换器
2759
功率因数校正用电感材料
887
一种具有恒功率控制的单级功率因数校正电路
1091
改进的单级功率因数校正AC/DC变换器的拓扑综述
640
一种新型单级功率因数校正(PFC)变换器
932
单级功率因数校正(PFC)研究的新进展
1079
功率因数校正控制器UC3854的建模与应用
3652
新颖的电流临界导通的功率因数校正芯片的研究
699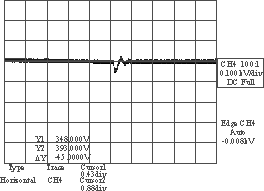
无源无损软开关功率因数校正电路的研制
1271
基于MC56F8323的单相功率因数校正模块的应用
1283
基于Matlab的高功率因数校正技术的仿真
4178
Boost功率因数校正开关变流器
43功率因数校正电路(PFC)原理图
13995
无源功率因数校正电路的原理和应用
88使用dsPIC® DSC实现能量转换应用中的功率因数校正
11单相Boost功率因数校正器的PFC数字控制策略
9EVADP1048 ADP1048 600W功率因数校正(PFC)评估板
17开源硬件-TIDM-BLPFC-无桥功率因数校正转换器 PCB layout 设计
267对于PFC(功率因数校正)你了解多少
3777
将 BCM 功率因数校正 (PFC) 控制器用于 100W 照明系统的 LED 应用设计指南
2使用 BCM 功率因数校正 (PFC) 控制器用于 200W 照明系统的 LED 应用设计指南
0美浦森推荐PFC 功率因数校正方案
648
什么是功率因数 功率因数校正基础知识
1056
- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶:huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉:mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华:lanhu@huaqiu.com
- 投资合作
- 曾海银:zenghaiyin@huaqiu.com
- 社区合作
- 刘勇:liuyong@huaqiu.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察



版权所有 © 深圳华秋电子有限公司
电子发烧友 (电路图) 粤公网安备 44030402000349 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号
评论