 电子发烧友App
电子发烧友App


基于空间矢量调制的三相矩阵式变换器
0 引言
随着可控交流电气传动的发展,PWM变频器的应用为自动化和节能赢得了可观的效益,同时也带来了谐波污染、低功率因数、直流滤波电容寿命有限等负面影响。而“绿色”变频器应具备输入和输出电流都是正弦波;输入功率因数可控,带任何负载都能使功率因数为1.0;可获得工频上下可控的输出频率等品质。目前的三电平双PWM交—直—交变频器、多逆变单元串联的中压变频器虽都可达到或接近这些要求,但这些装置非常笨重。矩阵式变换器与其相比具有下述非常明显的优势:
——输入功率因数正负可调,输出电压频率连续调节,功率可双向流动;
——无直流母线环节,传递能量密度高;
——输入波形好,无低次谐波,波形失真度小;
——体积小,结构紧凑。
正因为矩阵式变换器具有如此明显的优势,近年来它已成为电力电子研究的热点之一。
1 矩阵式变换器的结构
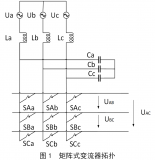
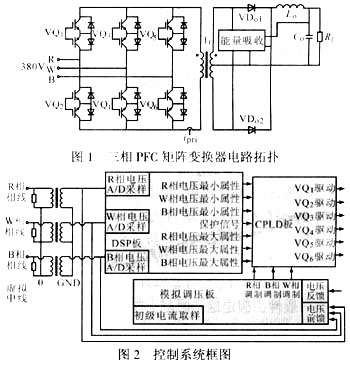
3φ-3φ矩阵式变换器是一种强迫换相的交—交变换器,它由9个可控的双向开关,利用PWM控制将交流供电电源直接变换成负载所需的变压变频电源。其结构如图1所示。输入侧的L-C滤波器可有效减少输入电流的开关频率谐波。

图1 矩阵式变换器的原理结构图
Fig 1 principle configuration of matrix converter
采用空间矢量调制时,矩阵式变换器认为是两个部分的串联组合。第一部分是AC/DC电压源整流,第二部分是DC/AC电压源逆变。图2是矩阵式变换器的等效交—直—交结构。
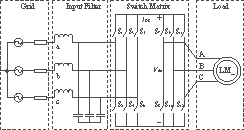
图2 矩阵式变换器的等效交—直—交结构
Fig 2 the equivalent AC/DC/AC structure of matrix converter
2 空间矢量调制(SVM)
能满足输入电压不被短路、输出电流不突然开路的矩阵式变换器开关组合共有27种,但有6种在等效交—直—交变换中找不到对应的开关组合,这6种是三个输出相分别连到三个输入相的开关组合。可用的21种开关组合如表1所列,表1中的“1”表示开关导通,“0”表示开关关断,第一组1P—9N三个输出相分别与两个输入相相连,剩下的第二组三个输出相仅与一个输入相相连而被短路。对于等效交—直—交变换的每一个合法的开关状态,矩阵式变换器有唯一的开关状态与之相对应。
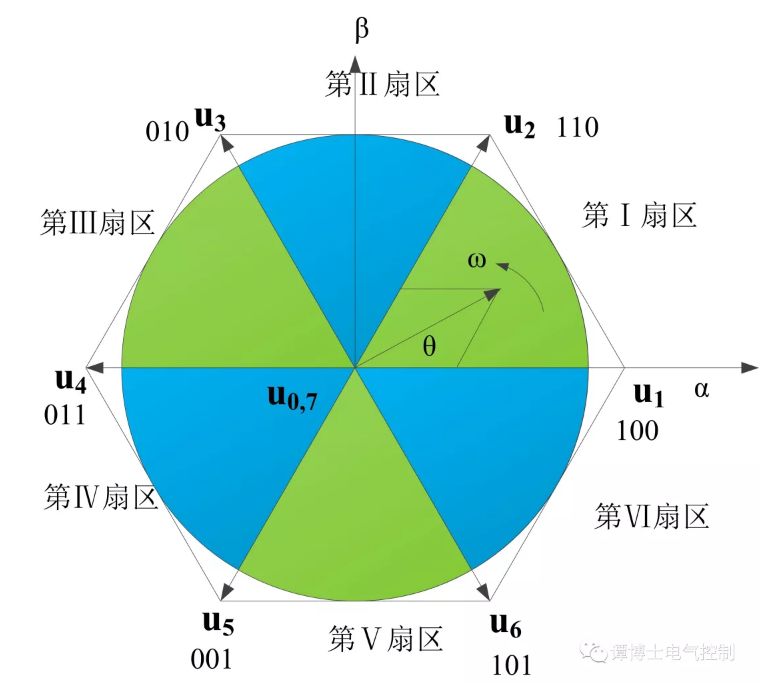
三相开关动作所能形成的定子电压空间矢量有8种,即6种有效矢量U1~U6,依次表示U1(100)、U2(110)、U3(010)、U4(011)、U5(001)、U6(101),2种零矢量U7及U8,表示为U7(000)和U8(111),它们的空间位置和相互关系如图3所示。括号中的数字,第一位表示A相,第二位表示B相,第三位表示C相,当某一相的上桥臂开关导通时记为1,下桥臂开关导通时记为0。利用这些电压空间矢量的线性组合,可以获得更多的与U1~U8相位不同的新的电压空间矢量,最终构成一组等幅不同相位的电压空间矢量。

图3 电压空间矢量图
Fig 3 the inverter voltage vector
如图3用U1、U6和零矢量来合成新的矢量,各矢量的作用时间可用开关周期Ts中的占空比来表示。
U1矢量的占空比(作用时间)为
Dα=tα/Ts=musin(60°-θv)(1)
U6矢量的占空比(作用时间)为
Dβ=tβ/Ts=musinθv(2)
零矢量的占空比(作用时间)为
Dou=tou/Ts=1-Dα-Dβ(3)
式中:mu为电压调制系数,0<=mu=![]()
![]() <=1。同理对于虚拟整流器部分也可采用复空间表达方式定义输入相电流矢量,获得输入电流空间矢量调制的方案。
<=1。同理对于虚拟整流器部分也可采用复空间表达方式定义输入相电流矢量,获得输入电流空间矢量调制的方案。

图4 电流空间矢量图
Fig 4 the rectifier current vector
表1 矩阵式变换器有效开关组合表及与等效交—直—交变换器对应关系
Tab 1 Valid switch combinations of a matrix converter and thestationary vectors
| 21矢量
开关组合 | 开关状态 | 输出电压 | 输入电流 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SAaSAbSAc | SBaSBbSBc | SCaSCbSCc | UAB | UBC | UCA | Ia | Ib | Ic | |
| 1P | 100 | 010 | 010 | Uab | 0 | -Uab | IA | -IA | 0 |
| 1N | 010 | 100 | 100 | -Uab | 0 | Uab | -IA | IA | 0 |
| 2P | 010 | 001 | 001 | Ubc | 0 | -Ubc | 0 | IA | -IA |
| 2N | 001 | 010 | 010 | -Ubc | 0 | Ubc | 0 | -IA | -IA |
| 3P | 001 | 100 | 100 | Uca | 0 | -Uca | -IA | 0 | IA |
| 3N | 100 | 001 | 001 | -Uca | 0 | Uca | IA | 0 | -IA |
| 4P | 010 | 100 | 010 | -Uab | Uab | 0 | IB | -IB | 0 |
| 4N | 100 | 010 | 100 | Uab | -Uab | 0 | -IB | IB | 0 |
| 5P | 001 | 010 | 001 | -Ubc | Ubc | 0 | IB | IA | IC |
| 5N | 010 | 001 | 010 | Ubc | -Ubc | 0 | 0 | -IB | IB |
| 6P | 100 | 001 | 100 | -Uca | Uca | 0 | IB | IC | IA |
| 6N | 001 | 100 | 001 | Uca | -Uca | 0 | IB | 0 | -IB |
| 7P | 010 | 010 | 100 | 0 | -Uab | Uab | IA | -IA | 0 |
| 7N | 100 | 100 | 010 | 0 | Uab | -Uab | -IC | IC | 0 |
| 8P | 001 | 001 | 010 | 0 | -Ubc | Ubc | 0 | IC | -IC |
| 8N | 010 | 010 | 001 | 0 | Ubc | -Ubc | 0 | -IC | IC |
| 9P | 100 | 100 | 001 | 0 | -Uca | Uca | -IC | 0 | IC |
| 9N | 001 | 001 | 100 | 0 | Uca | -Uca | IC | 0 | -IC |
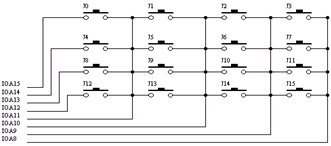
| 0A | 100 | 100 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0B | 010 | 010 | 010 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0C | 001 | 001 | 001 | 0 | 0 | 0 | 0 | 0 | 0 |
双空间矢量PWM调制是对输入电流和输出电压同步调制,逆变器部分的理想输出线电压基准矢量圆和整流器部分的理想输入相电流基准矢量圆都被划分为6个扇区,从而有36种可能的组合。以虚拟整流器、逆变器均工作在第I扇区为例,整个输入相电流和输出线电压矢量合成过程共有I6-U6,I6—U1,I1-U6,I1-U1及零矢量I0-U0五种组合。即
I6-U6:
Dxα=mumisin(60°-θi)sin(60°-θv)(4)
I6—U1:
Dxβ=mumisin(60°-θi)sinθv(5)
I1-U6:
Dyα=mumisinθisin(60°-θv)(6)
I1-U1:
Dyβ=mumisinθisinθv(7)
I0-U0:
D0=1-Dxα-Dxβ-Dyα-Dyβ(8)
式中:mi为电流的调制系数;
θi为输入相电流的相角;
θv为输出线电压的相角。
为减少输入线电流和输出线电压的谐波分量,我们采取对称空间矢量调制策略。如图5所示,在一个调制周期内,将上述开关组合占空比减半,并以零矢量为中心对称分布如下:1P,3N,4N,6P,0A,1P,3N,4N,6P。占空比:
Dxα/2→Dyα/2→Dyβ/2→Dxβ/2→D0→Dxβ/2→Dyβ/2→Dyα/2→Dxα/2

图5 8开关对称调制方案
Fig 5 the 8-switches double-sided modulator
3 GAL四步安全换流方案
用图6中A相换流到B相为例说明:当负载电流iL>0时,第一步关断S1的负导通部分S1N;第二步开通S2的正导通部分S2P;第三步关断S1的正导通部分S1P;第四步开通S2的负导通部分S2N,这样就完成了两个双向开关之间的换流,其换流波形如图7所示,其中S1和S2为两个双向开关的理想控制信号。可见,四步换流成功地构成了对两个双向开关的换流控制,既禁止了可能使电源发生短路的开关组合,又保证了在任意时刻给负载提供至少一条流通路径。换流过程可用Lattice公司生产的复杂可编程逻辑器件GAL22V10来实现。
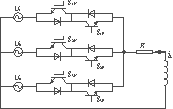
图6 矩阵式变换器一相输出电路示意图
Fig 6 one phase circuit of matrix converter
图7是用GAL实现的安全四步换流的时序图。
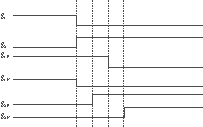
图7 四步换流次序图
Fig 7 the sequence of four-step commutation
4 DSP实现
TMS320LF2407A具有25ns的指令周期,500nsA/D转换时间,低功耗3.3V设计,2个独立的事件管理器,4个定时/计数器,并于同类其它系列完全兼容。
为使输入电流与输入电压保持频率相位一致,需要对输入电压进行检测。输入电压通过三相输入同步变压器,过零比较器得到三相互相间隔120°的数字电平信号,分别送入DSP的3个IO口和捕获口,三相电平信号的上升沿和下降沿把输入电压空间矢量圆划分为6个扇区,设定DSP捕获单元对上升沿和下降沿均产生中断,以启动定时器对每个扇区定时,采样周期到达时读取定时器的计数值和IO口的电平情况,从而得出当前时刻输入电压矢量所在的扇区和相位,也就是得到了期望的输入电流矢量所在的扇区和相位。
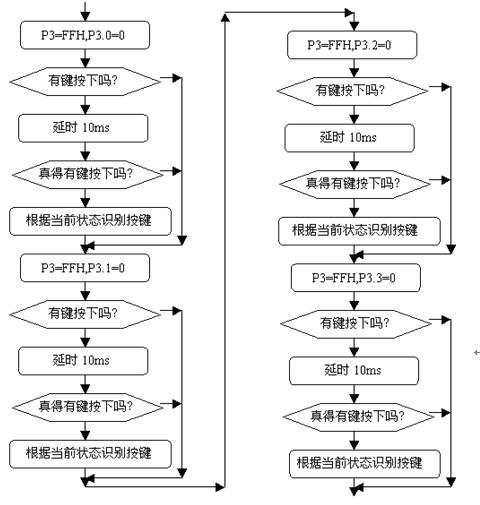
DSP程序中,每100μs产生5个PWM脉冲,系统的采样频率是5kHz,输入电压每200μs采样一次。采用通用定时器1和通用定时器2,通用定时器1周期是100μs用来产生PWM脉冲和GAL的扇区值,通用定时器2周期是200μs用来采样输入电压、计算开关次数,并决定输出线电压和输入电流的扇区值。DSP的程序流程图如图8所示。
图8 DSP程序流程图
Fig 8 the flowchat of DSP program
5仿真和实验结果
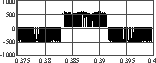
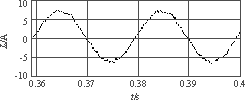
应用Matlab/Simulink软件包和交—交直接变换控制开关表对三相矩阵式变换器进行了仿真。当负载为电阻性负载时其典型的输入电流和输出电压波形如图9所示。当输入采用了高频滤波器以使输入相电流连续并拖动三相异步电机稳态运行时其典型的输入、输出电压、电流波形如图10所示。

(a) 输入电流
(b) 输出电压
图9 电阻负载时波形
Fig.9 the input current(a)and output voltage(b)wave when the load is resistor

(a) 输入电流
(b) 输出电压
图10 稳定运行时波形
Fig.10 the input current(a)and output voltage(b)wave when it is properly working
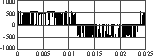
实验中采用IGBT以集电极反串联组合构成双向开关,图11、图12、图13是实验所得的波形。

图11 输入电流实验波形
Fig.11 the experimental wave of input current
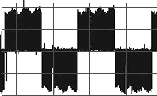
图12 线电压开路实验波形
Fig.12 the experimental wave of line voltage

图13 滤波后线电压实验波形
Fig.13 the experimental wave of line voltage after filter
6 结语
本文介绍了空间矢量调制的双向开关矩阵式变换器的设计和实现方法。利用交—直—交等效模型得到矩阵式变换器等效的21种有效的开关组合,提出了四步安全换流方案,并采用数字信号处理(DSP)技术和通用逻辑阵列(GAL)技术来实现双矢量的空间调制策略。实验结果显示输入电压、电流基本同相,输出线电压THD较小,线电流正弦变化。仿真和实验验证了这种控制策略的实际可行性。












 工商网监
工商网监
评论