 电子发烧友App
电子发烧友App



UPS逆变模块的Nm冗余并联结构和均流
0 引言
随着国民经济的发展和用电设备的不断增加,对UPS容量的要求越来越大。大容量的UPS有两种构成方式:一种是采用单台大容量UPS;另一种是在UPS单机内部采用功率模块N+m冗余并联结构。前者的缺点是成本高、体积重量大、运输安装困难、可靠性差,一旦出现故障将会引起供电瘫痪。后者的好处是提高了供电的灵活性,可以将小功率模块的开关频率提高到MHz级,从而提高了模块的功率密度,使UPS的体积重量减小;并且减小了各模块的功率开关器件的电流应力,提高了UPS的可靠性;同时动态响应快,可以实现标准化,便于维修更换等。
N+m冗余并联技术是专门为了提高UPS的可靠性和热维修〔也称作热插拔和热更换(hotplug-in)〕而采用的一种新技术。所谓N+m冗余并联,是指在一个UPS单机内部,采用N+ m个相同的电源模块(power supply units,简称PSU)并联组成UPS整机。其中N代表向负载提供额定电流的模块个数,m代表冗余模块个数。m越大USP的可靠性越高,但UPS的成本也越高。在正常运行时UPS由N+ m个模块并联向负载供电,每个模块平均负担1/(N+m)的负载电流,当其中某一个或k个(k≤m)模块故障时,就自行退出供电,而由剩下的N+(m-k)个模块继续向负载提供100%的电流,从而保证了USP的不间断供电。
1 N+m冗余并联的可靠性、可用性及条件
1.1 可靠性的提高
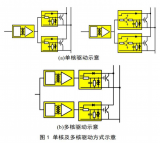
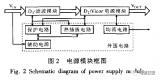
由N+m个小功率模块组成的冗余并联结构形式的UPS如图1和图2所示。图1是采用n个整流模块、一组蓄电池和k个逆变模块组成的冗余并联结构形式,n可以等于k,也可以不等于k。图2是采用n个整流模块、n组蓄电池和n个逆变模块组成的UPS模块冗余并联结构形式。图3是采用单一大功率整流模块、一组蓄电池和一个大功率逆变模块组成的结构形式,是一般UPS常用的结构形式。

图1 n个整流模块和k个逆变模块组成的冗余并联式UPS

图2 n个整流模块和n个蓄电池及n个逆变模块组成的冗余并联式UPS
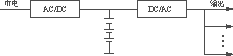
图3 单台大容量UPS的结构形式
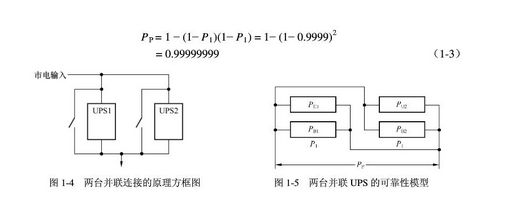
下面我们以图2所示的冗余并联结构为例,说明为什么冗余并联结构能够使可靠性得以提高。当n=k=N+m时,假定由一个整流模块和一组蓄电池及一个逆变模块组成的UPS模块(如图2中虚线框内所示)的可靠性为P1,则N+ m个UPS模块的可靠性为
PN+m=1-(1-P1)N+m
例如,当一个UPS模块的可靠性P1=0.99时(不可靠性为1%),如果N+m=3,则
P3=1-(1-0.99)3=0.999999
3个UPS模块的并联可以将可靠性提高4个数量级,不可靠性由原来的1%降到了0.000001%。
1.2 可用性的提高
UPS的可用性的一般定义为
可用性(Availability)=![]() (1)
(1)
式中:MTBF为平均无故障时间,反映UPS的可靠性及冗余性;
MTTR为平均维修时间,即维修所需要的时间。
式(1)说明,UPS的可用性不仅仅取决于MTBF,而且还取决于MTTR,只有采用热更换(热插拔)方式,才能使UPS实现不停机更换模块,即不中断供电维修,这样才能真正减小MTTR,提高可用性。要实现UPS的热插拔不停机更换模块技术,必须满足3个条件:一是正常工作UPS模块自动投入电网;二是并联运行的UPS模块之间要实现有功和无功电流的平均分配;三是USP退出并联,特别是在不干扰电网的情况下快速切除故障的USP模块。有了这3个方面的工作,也就解决了USP模块的热插拔(热更换)技术。
通常采用的是N+1(即m=1)冗余并联方式,这种方式已在通信直流电源中得到了成功应用。直流电源的N+1冗余并联运行技术比较简单,只需要使电压的大小和极性相同就可以了,而且还能很方便地用二极管来隔离故障的模块。但是,对于UPS交流电源模块的并联技术要复杂得多,它需要使相序、频率、相位、电压幅值和波形等5个参数相同才能并联。同时对故障模块的隔离也不能用二极管来实现。
USP模块的并联,也不同于同步发电机的并联,后者由于输出阻抗高,靠其本身的下垂特性可以自行均流。同时输出电流大的发电机可以自行降低转速,达到频率和相位的一致。而USP模块不具备这些特性,需要用控制电路来解决静态和动态同步均流及热插拔技术。
1.3 UPS模块实现N+1冗余并联的条件
USP模块的N+1冗余并联技术,是提高USP可靠性和可用性的关键技术,模块的并联必须满足以下3个条件才能实现:
1)各个UPS模块的频率、相位、相序、电压幅值和波形必须相同;
2)各个UPS模块在输入电压和负载的变化范围内,必须能够实现对负载有功和无功电流的均匀分配,为此要求均流电路的动态响应特性要好,稳定度要高;
3)当均流或同步出现异常情况或UPS模块出现故障时,应能自动检出故障模块,并将其迅速切除而又不影响UPS的正常运行。
其中有两项关键技术:一是同步技术,另一个是均流技术。前者主要是解决各UPS模块的频率、相位、波形和相序的一致,后者主要是解决各UPS模块均匀负担负载功率的问题。由于各个UPS模块都是与市电电网同步并联工作的,在各个UPS模块中都有相同的相应电路或各模块有一共用的相应电路来实现与市电的同步,同步后各模块的频率、相位、波形和相序都与市电电网相同,满足了条件1)中五个参数的四个。只有各模块之间的输出电压可能有些差别,这种差别主要是由直流电压的不同(例如蓄电池电压不同),或模块内阻压降不同(例如整流管或逆变器开关器件的正向压降的不同)等引起的。因此,均流就成了UPS模块并联工作的主要问题,必须用均流的办法使各UPS模块的输出电压一致。由于各个模块的输出是通过共用母线加到负载上的,这相当于各个模块共同负担同一个负载,所以,各模块的输出负载功率因数只取决于母线上总的负载的功率因数,因此,各模块的输出功率因数相同,在均流时不必再区分有功和无功,只对模块的总输出电流进行均流即可。下面介绍模块的均流方法。
2 USP模块的均流
UPS模块的均流有多种方法,例如,自整步均流法、外特性下垂法、外部控制法、主从控制均流法、平均电流均流法、自动均流法和民主主从均流法等。在这些均流法中,并不都适合于UPS模块的N+1冗余并联,例如,外特性下垂法和基于外特性下垂法的均流法,使模块的输出外特性变软,电压调整率降低,不适合于对输出电压精度要求较高(例如±1%~±3%)的USP应用;主从均流法必须要有通信连线,将使系统复杂化,同时,如果主USP模块一旦失败,则整个UPS就不能工作,因此,主从均流法也不适用于UPS的冗余并联系统,再则电压环的带宽较大,也易受外界噪声的干扰;外部控制法需要外加专门的控制器,UPS模块要进行多路联系,连线较复杂也不能实现冗余并联,故也不适合于USP的多模块冗余并联;平均值电流法的输出电流,是通过跟踪同一个给定电流来实现均流的,各模块之间的信号连线较多,同时也不能实现冗余并联,故也不能采用;只有自动均流法和民主主从均流法既适合于USP模块的冗余并联工作,又不影响输出电压的精度,电路也比较简单,是一种比较好的均流法。
自动均流法和民主主从均流法,都是源于上个世纪80年代的直流均流法。将这两种直流均流法应用于交流均流时,只须加一个整流环节,将交流信号变换成直流信号就可以了。由于逆变器的交流稳压控制的基准电压给定值,一般都是采用与电压有效值等效的直流信号。所以,均流电路输出的直流调整控制信号,可以直接用于通过对基准电压直流给定信号的改变,来实现USP模块的交流均流。
2.1 自动均流法
自动均流法(automatic approach)又称作外加均流器法(external controller approach)。在每一个模块的控制电路中都需要加一个特殊的均流控制器〔sharingcontroller,(SC)〕,用以检测并联各模块输出电流的不均衡情况,输出调整控制信号Uck,以控制各个模块实现输出均流。这种均流法需要加一根均流母线(sharebus)的带宽较窄的通信线连接各个模块,均流母线上的电压为UB。
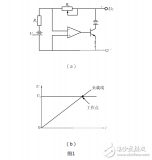
图4给出N个模块并联系统的自动均流法的原理框图。图中只示出了均流控制环,电压控制环没有画出,它由模块的控制电路来实现。

图4 N个模块并联的自动均流法的原理框图
模块k(k=1,2,……N)的均流控制器SCK,其输入为均流母线电压UB和模块k的输出负载电流Ik的直流检测信号UIk,SCk的输出电压信号Uck与基准电压给定值Ug相加,产生出基准电压Urk,用基准电压UrK对UPS模块中的逆变器进行PWM控制,就可以使模块的输出电压发生变化,以达到均流的目的。为了检测各个模块的输出电流,在均流控制器的输入端接了一个采样电阻R。如果把均流母线看成是一个节点,根据电工学中基尔霍夫定律可知:流入均流母线的总电流代数和应为零。于是当各模块的采样电阻值相同时可得
IB1=![]() ;IB2=
;IB2=![]() ;……IBN=
;……IBN=![]()
由于 IB1+IB2+……+IBN=0
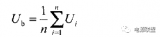
所以 UB=![]() (2)
(2)
式(2)说明,均流母线上的电压UB,是各个并联模块负载电流的直流检测信号,亦即是各模块负载电流相对应的整流放大器的输出电压UI1,UI2,……,UIN的平均值,它反映的是各模块输出电流的平均值。
UIk与UB之差代表均流误差,通过均流控制器输出一个调整控制电压Uck,一般情况下,UB可能大于UIk也可能小于UIk。当UB=UIk时,UB-UIk=0,表明这时已实现了均流,则Uck=0。当UB≠UIk时,Uck≠0,表明电流分配不均匀。这时,基准电压Urk按下式修正:Urk=Ug±Uck,相当于通过均流误差放大器Ak改变Urk,以达到均流目的。
使用这一方法实现均流,可以使N个并联模块的电流不均衡度(即均流误差)在5%以内。定义模块k的不均衡度为
S=![]() ×100%
×100%
式中:IL为并联输出的负载电流;
Ik为模块k承担的电流;
Ikmax为模块k的最大电流。
应用均流母线检测模块的输出电流,还要在窄频带的均流环中用运算放大器产生均流误差信号,以调节基准电压,将使并联系统的瞬态过程复杂化。为避免使UPS的瞬态特性变坏,甚至不稳定,应正确设计均流环的增益。
自动均流法的优点是电路简单、容易实现、均流精度高,缺点是如果有一个模块与均流母线短路,或接在母线上的任一个模块不能工作,则母线电压下降,将促使各模块电压下调,甚至到达其下限,结果造成故障;而当某一模块的电流上升到其极限值时,该模块的电流检测信号UIk大幅度增大,也会使它的输出电压自动调节到下限。下面介绍解决上述两个缺点的措施。
2.1.1 监控均流母线对地短路故障的措施
均流母线工作正常时电压UB为一定值,且等于各模块电流Ik检测信号电压UIk的平均值;而均流母线短路时其电压UB=0,利用这个特点,在均流电路中接一个均流母线电压检测电路,就可以及时发现母线短路故障。检测电路如图5所示,它由光耦、继电器和声光报警器组成。

图5 均流母线对地短路报警信号
2.1.2 任一模块不工作时的监控措施
模块失效时,其输出电流也为零,相应的模块电流Ik检测信号电压UIk=0,即图6中a点电压等于零。因此,在整流放大器的输出端接一个电压检测电路,就可以实现对模块失效的监控。监控电路如图6所示,它由光耦、继电器和声光报警器组成。模块正常工作时,UIk>0,光耦导通,继电器K工作,K的常开接点闭合,均流采样电阻R接入母线,K的常闭接点断开,报警器不工作;当模块失效时,UIk=0,光耦截止,K失电,K的常开接点断开,模块与母线隔离,保证了其他模块不下调,K的常闭接点闭合,报警器工作,告知用户该模块失效。

图6 模块失效监控电路
2.2 民主均流法
民主均流(democratic)法或称自治(autonomous)法是另一种自动均流法,它是按最大电流(highest current)自动均流的,这种均流法也有人将其称作自动民主均流法。其电路是在图4所示的自动均流法电路中,将采样电阻换成二极管而成的。二极管的正端接在a点上,负端接在b点上,由于N个二极管的负极都接在了均流母线上,处于相同的电位,则N个并联模块中只有输出电流最大的那个模块的负载电流检测信号电压UIk最高。因此,也只有输出电流最大的那个模块,才能使与它连接的二极管导通,导通后使均流母线上的电压UB=UIk,其他的二极管因受反偏置而截止。与截止二极管对应的模块,就以均流母线上的电压为基准来调整各自的输出电流,从而实现均流。
从以上分析可知,民主均流法实质上是在N个并联的模块中,输出电流最大的模块将自动成为主模块,其余的模块则成为从模块,各个从模块的电压误差依次被整定,以调节负载电流分配的不均衡。由于N个并联的模块中,事先没有人为设定哪个模块为主模块,而是按输出电流的大小随机排序,输出电流大的模块自动成为主模块,所以人们称此种均流法为自动民主均流法,或民主自动主从设定均流法。民主均流法(即按最大电流自动均流)的原理框图如图7所示。图中模块k的电流检测信号UIk经过一个二极管接到均流母线上,均流母线上的电压UB=max│UIk,k=1,2,……,N│反映N个并联模块中最大的一个模块电流。均流控制器SCk的输入是最大的模块电流与各从模块电流的差值。以N=2为例,假定模块1的输出电流大于模块2的输出电流,则UI1>UI2,UI1使二极管VD1导通,UB=UI1。由于UI2<UB=UI1,所以二极管VD2截止。SC1的输出电压Uc1=0,SC2的输出电压Uc2=+Uc2,+Uc2使模块2的基准电压增大,并使模块2的输出电流增加,达到均流目的,此时,UI1=UI2=UB,I1=I2=IL/2。

(a) 电路框图

(b) 电压跟随器电路图
图7 民主均流法的原理电路框图
在正常情况下,各模块的输出电流是相等的,如果由于某个原因使模块k的输出电流突然增大,则模块k自动成为主模块,其他的N-1个模块自动成为从模块。这时UB=UIk>UIm,各个从模块UIm(m=1,2,……,k-1,k+1,……,N)与UB(即UImax)比较后,通过SCm调整基准电压Urk,自动实现均流。
以上是假定二极管是理想器件,即它的正向压降等于零。实际上二极管是有正向压降的,这个正向压降对从模块的均流精度虽无影响,但对主模块的均流精度影响较大。为了克服二极管正向压降对主模块均流精度的影响,可以用图7(b)所示的电压跟随器(或称单向缓冲器buffer)来代替二极管。
3 均流的实现
以民主均流为例,来说明UPS模块的均流并联运行。
3.1 模块的电路结构
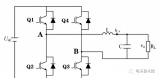
单个模块的电路结构如图8所示。主电路是由全桥逆变器和交流滤波器LF及CF组成,控制电路可以采用以基准电压Urk为基准进行稳压控制的任何形式的PWM控制电路。

图8 单个模块的电路组成
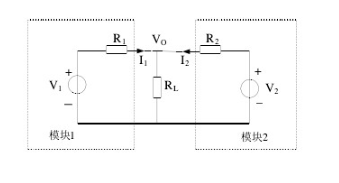
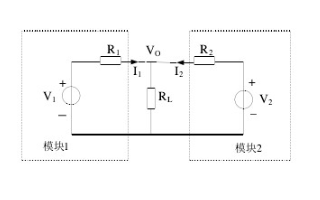
由图8可以得到单个模块的数学模型如图9所示。图9中电压UAB就是图8中逆变器两个桥臂中点A和B两点之间的电压,iH为环流。

图9 模块的数学模型
由图9可以得到如下两个传递函数
![]() =
=![]() (3)
(3)
![]() =
=![]() (4)
(4)
由式(3)与式(4)可知,环流对输出电压的传递函数,与输入电压对输出电压的传递函数的极点配置是相同的。因此,通过对输入基准电压Urk的调节,就可以减小环流,从而达到均流的目的。
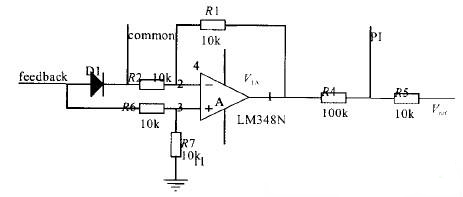
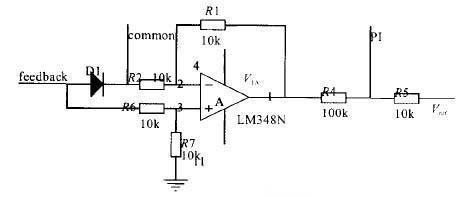
图10为一个模块的基准正弦波电压发生器电路,它由精度整流器(A2)、积分器(A3)、可变增益放大器(A1)、功率放大器和波形反馈等组成。输出电压Urk的稳压精度可达±0.02%,波形失真度<0.5%。输出电压的大小可以通过给定电压Ug来整定。因此,均流控制器SCk的输出电压Uck,可以通过改变给定电压Ug的值,来改变基准电压Urk的值,以达到均流的目的。

图10 基准正弦波电压发生器电路
3.2 均流控制的实现电路
在均流控制中,由于我们已假定采用图7所示的民主均流法,则输出电流最大的主模块,通过均流母线将主模块的最大电流传送给各个从模块。当各个从模块得到主模块的电流数据后与自身的输出电流进行比较,将其差值通过均流控制器SCk产生一个直流电压Uck去改变模块的给定电压Ug,使Urk=Ug+Uck,通过Urk的变化去控制各个从模块的输出电压增大,从而也使输出电流增大,直至各个模块的输出电流相等时为止,达到均流目的。
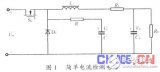
一种典型的均流电路实施方式如图11所示。模块-k的输出电流通过电流互感器TAk的检测,再经过整流放大电路后输出一个直流电压UIk,UIk正比于模块的输出电流Ik。各模块的直流电压UIK通过采样二极管VDk接到均流母线上。只有输出电流最大的模块-k所对应的直流电压UIk才能使与其连接的二极管导通,导通后均流母线上的电压UB=max│UIk,k=1,2,……,N│,其他的二极管因受反偏置而截止。输出电流最大的模块为主模块,其余模块为从模块。由于从模块的UIk<UB,故均流控制器SCk输出+Uck,+Uck与给定电压Ug相加,使基准电压Urk=Ug+Uck,Urk使模块的输出电压上升,也就是使输出电流增大。由于负载所需的电流没有变化,故从模块输出电流的增大必然会引起主模块输出电流的减小,最终使各模块的输出电流相等,达到均流目的。

图11 一种典型的均流控制电路
如果图11中的采样二极管VDk用图7(b)所示的缓冲电路来取代,就可以克服前面曾经提到的,因二极管正向压降而引起的主模块均流精度降低的缺点。
同样,若用采样电阻R代替二极管,则图11所示的均流控制电路就变成了自动均流法控制电路,也可以实现均流。
这里需要指明的一点是,可允许的UPS模块的并联个数,取决于对UPS可靠性的要求,以及均流精度,对USP可靠性要求越高,均流精度越高,可允许的UPS模块的并联个数越多。另外也需要指出的是,UPS模块的并联个数并不是越多可靠性越高,当并联个数达到一定程度以后,再多不但不能增大可靠性,反而使可靠性降低,这是由于并联均流电路和通信电路、同步电路的故障率增多而造成的。
4 同步电路
UPS模块并联的同步方式有两种:一种是各个模块分别独立地与市电同步;另一种是各个模块共用一个同步电路与市电同步,但各模块的基准正弦电压分别独立产生。前一种方法同步过程时间长,电路较复杂;后一种方法同步时间短,电路较简单,有利于冗余并联。采用后一种同步方法的同步原理电路如图12所示。在并联控制器中设置了一个共用同步电路使UPS中的本机振荡器与市电同步。经过同步的振荡器信号分别送到各个UPS模块中的基准正弦波电压发生器中,使其产生出各模块所需的基准正弦波电压Urk,Urk的幅值受给定电压Ug的控制。通过对各模块给定电压Ug的整定,可以使各模块的基准正弦波电压Urk的幅值相等。各个模块的控制电路控制其输出电压uL跟踪Urk,就达到了各模块输出电压与市电电压同步的目的。振荡器与市电电压的同步由锁相环来完成,由于晶振频率精度很高,稳定性也很好,因此,可以认为各个模块的输出电压频率、相位和波形是完全相同的,电压的幅值用给定电压Ug进行整定,也可以达到相等。
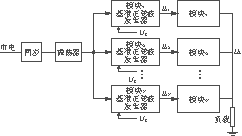
图12 N个并联模块与市电同步的原理框图
5 结语
UPS模块N+m冗余并联,当采用前面介绍的民主均流法时,可以采用美国Unitrode公司生产的UC3907集成均流控制芯片。此芯片结构简单、功能强大、已在直流开关电源N+m并联系统中得到了广泛应用。交流冗余并联的发展方向是采用数字控制,其优点是智能化程度高、灵活、成本低廉、可靠性高、维护方便、一致性强。
正弦波UPS模块的控制策略,除了前面介绍的方法以外,还有PLD控制、无差拍控制、模糊控制等,不管是哪种控制策略,通过改变模块基准电压的方法都可以实现均流控制。










 工商网监
工商网监
评论