 电子发烧友App
电子发烧友App



|
全数字伺服系统中位置环和电子齿轮的设计
摘要:分析了伺服系统中位置环和电子齿轮的工作原理,同时介绍了一种位置环和电子齿轮的数字实现方法。最后通过实验验证了该设计的可行性。 关键词:伺服系统;位置环;电子齿轮
0 引言 随着电力电子和数字控制技术的发展,越来越多的控制系统采用数字化的控制方式。在目前广泛应用于数控车床、纺织机械领域的伺服系统中,采用全数字化的控制方式已是大势所趋。数字化控制与模拟控制相比不仅具有控制方便,性能稳定,成本低廉等优点,同时也为伺服系统实现网络化,智能化控制开辟了发展空间。全数字控制的伺服系统不仅可以方便地实现电机控制,同时通过软件的编程可以实现多种附加功能,使得伺服系统更为人性化,智能化,这也正是模拟控制所不能达到的。 目前,伺服系统主要用于位置控制,诸如数控车床、电梯等领域,在这些应用场合中,无法通过速度控制来实现系统的精确定位,因此必须引入位置控制方式。在伺服系统中一般采用光电码盘作为位置反馈信号,根据光电码盘在电机转过一圈时产生的脉冲数来对电机进行精确的定位。在实际应用中,电机与其它机械?置采用齿轮的连接方式,一旦固定连接后,电机每转一圈产生的机械轴位移量一定。并且,在伺服控制系统中,位置控制通常由上位控制器产生一定频率和个数的脉冲来决定电机的转速和转过的角度,当指令脉冲当量和位置反馈脉冲当量不一致时,就必须采用电子齿轮的方法来进行调节。本文针对永磁同步电机的伺服系统,对其位置环和电子齿轮功能进行了数字化设计,最后通过定位实验证明设计的合理性。 1 位置环的设计 作为伺服定位系统,在定位控制时,必须满足以下3方面的要求: ——定位精度,要求系统稳态误差为零; ——定位速度,要求系统有尽可能高的动态响应速度; ——要求系统位置响应无超调。 在实际应用中位置环通常设计成比例控制环节,通过调节比例增益,可以保证系统对位置响应的无超调,但通常这样会降低系统的动态响应速度。另外,为了使伺服系统获得高的定位精度,通常要求上位控制器对给定位置和实际位置进行误差的累计,并且要求以一定的控制算法进行补偿。另外一种方法是把位置环设计成比例积分环节,通过对位置误差的积分来保证系统的定位精度,这使上位控制器免除了对位置误差的累计,降低了控制复杂度。但这和采用比例调节的位置控制器一样,在位置响应无超调的同时,降低了系统的动态响应性能。本文把位置环设计成比例控制器,并且通过一个误差累加器对位置误差进行累计,从而保证定位精度,同时通过分析位置环的闭环传递函数来说明比例系数的取值。 图1是位置伺服系统的控制框图,图中R(s)代表相应的指令脉冲输入,C(s)代表电机相应转过的位置。其中当速度调节器采用PI控制时,在位置环的截止频率远小于速度环的截至频率时,速度环的闭环传递函数可以等效为一个惯性环节,即G2(s)=Kv/(Tvs+1),电机等效为一个积分环节,即G3(s)=Km/s。下面先来分析位置环设计成比例控制时的情况,此时G1(s)=Kc,则系统的闭环传递函数为 H(s)= 式中:K=KcKvKm。
图1 位置伺服系统控制框图 从开环传递函数看,系统属于I型系统,对斜坡函数和抛物线函数的输入都存在稳态误差,而目前在伺服系统中应用最为广泛的指数函数,可以近似等效为斜坡函数,因此也存在一定的稳态误差。这时要获得较高的定位精度,通常需要上位控制器不断地对位置误差信号进行累计,并以一定的控制算法去进行补偿。另外,由于系统要求位置响应无超调,因此要求阻尼比ξ>=1,此时有 Kc<= 因此在满足位置无超调的调节下,为了获得尽可能快的动态响应,位置环比例系数应尽可能大。 2 位置环的软件实现 本文中伺服系统的位置信号由上位控制器的指令脉冲决定,其格式为脉冲序列+方向信号。DSP控制系统通过判断方向信号来获得电机的给定转向,脉冲序列中的脉冲频率决定电机的转速,累计的脉冲个数决定电机转过的角度。因此在位置环的软件实现时,需要对输出脉冲和反馈脉冲的误差进行累计。并且由于DSP字长的限制,当指令脉冲频率较大且电机响应速度跟不上时,需要考虑误差脉冲的溢出情况。图2是整个伺服系统位置环的控制框图。
图2 伺服位置环的控制框图 位置调节器相当于一个带比例增益的累加器,对输出脉冲的误差进行累加,具体的算法如下: R(KT)=KcΔS=Kc 式中:ΔS为累计的误差脉冲个数; T为采样周期; DT3为每个采样周期内获得的指令脉冲个数; Kg为电子齿轮系数; DT2为每个采样周期内反馈脉冲的个数。 溢出脉冲控制器对误差ΔS进行溢出判断,这里考虑到DSP字长的位数(字长为16位),当误差值ΔS>214时即为溢出,此时应设定相应的滞留脉冲控制器,一旦出现脉冲溢出现象,便控制位置环输出最大值,即给定最高转速。位置环的输出经过速度限幅后进入速度控制器。 当伺服系统的跟踪速度由输入脉冲的频率决定时,误差ΔS的值为一定值,此时输入脉冲和反馈脉冲的动态平衡方程如下: DT3(KT)Kg=DT2(KT)(4) 当输入脉冲的频率不断变化时,则伺服系统的跟踪速度不断变换,此时误差ΔS的值不断变化,并且最后把误差ΔS里的滞留脉冲全部输出,从而实现无误差定位。 3 电子齿轮的设计 3.1 电子齿轮的原理 为了使指令脉冲当量与反馈脉冲当量一致,在伺服系统的实际应用中,需要采用电子齿轮来进行调节。这里设电机转过一圈对应的机械位移是ΔL,则反馈脉冲当量可以计算如下: ΔPf=ΔL/(4×2500)(5) 这里考虑采用2500脉冲/圈的增量式光电编码盘,并且经4倍频电路使用。 当指令脉冲当量ΔPg与反馈脉冲当量ΔPf不匹配时,必须采用电子齿轮系数Kg来使两者匹配。其公式如下: ΔPgKg=ΔPf(6) 从图2可以看出,电子齿轮Kg在位置环的外面,因此改变Kg的值不会影响位置环的性能。在目前的伺服应用中,电子齿轮Kg的取值范围为0.01<=Kg<=100。 通常在采用软件实现电子齿轮时可以设置两个比例系数,即 Kg=spdt1/spdt2(7) 则式(6)变为 ΔPgspdt1=ΔPfspdt2(8) 式中:spdt1可以看作是指令脉冲的电子齿轮系数,而spdt2可看作是反馈脉冲的电子齿轮系数。 为了更加详细地说明电子齿轮的用途,下面将分两种情况来分析。 3.1.1 对指令脉冲频率的跟踪 此时电机的速度由指令脉冲的频率决定,其转速v(r/min)与输入脉冲频率fin(Hz)的关系如下: v= 通过设置两个电子齿轮系数,可以在同一个输入脉冲频率下获得不同的电机稳定转速。另外,输入的最高脉冲频率不能超过DSP识别的范围,这里考虑DSP在读取电平值时,该电平至少需要维持2个机器周期的时间,因此最大的输入脉冲频率为 finmax= 在伺服系统的一般应用中,输入脉冲频率一般在几十到几百kHz。这种情况下如果电机处于速度控制模式下,可以通过调节指令脉冲频率来实现电机的调速;如果电机位于位置控制模式下,则需要对指令脉冲和反馈脉冲的脉冲误差进行累计,最终全部输出,这一步可以通过位置环的脉冲误差累加器ΔS来实现。 3.1.2 对指令脉冲个数的跟踪 这种情况下输入的脉冲个数决定于电机连接的机械轴的实际位移量。其机械总位移L与输入脉冲的个数S有如下关系: L=SΔPg(10) 结合式(5)和式(6),可得 L= 通过设定spdt1和spdt2,可以在相同的脉冲输入个数下获得不同的机械轴位移。另外,在这种情况下,当输入脉冲的频率高于电机在额定转速时对应的输入脉冲频率时,就会出现滞留脉冲的情况。与第一种情况类似,可以通过脉冲误差累加器ΔS来保存滞留脉冲,并最终输出,从而实现电机定位时的无误差。 3.2 电子齿轮的软件实现 这里使用F240DSP内部的两个可逆计数器来完成对指令脉冲和反馈脉冲的读取。在F240芯片中共有3个定时计数器,其中T1用作周期定时器,T2作为反馈脉冲计数器,T3作为指令脉冲计数器。其中T2配合DSP内部的QEP电路使用,接受光电编码盘的反馈信号并4倍频使用。T3计数器工作方式定义为外部时钟,并采用双向可逆计数。程序中,通过每个采样周期对T2和T3的计数寄存器的读取来获得指令脉冲和反馈脉冲个数。在每个采样周期T内,通过读取反馈信号获得的脉冲个数记为DT2,通过读取指令信号获得的脉冲个数记为DT3。因此在电机跟踪输入脉冲频率的情况下,电机的转速应为 v= 其中误差累加器ΔS的值为 ΔS= 当电机在固定输入频率下稳速运行时,其动态平衡方程为 DT3(iT)spdt2-DT2(iT)spdt1=0(14) 此时ΔS内的值即为滞留脉冲,需要全部输出。 3.3 指令脉冲输入的硬件接口电路 指令脉冲由上位控制器产生,其格式为指令脉冲序列和方向信号。在设计硬件接口电路时,首先考虑电路的抗干扰性,因此在设计中采用差分输入的形式,其差分驱动芯片选用AM26LS31。另外,由于整个控制电路采用DSP芯片实现,因此必须考虑控制电路和其他接口电路的电气隔离,这里选用6N137的光耦来实现电气隔离。图3是指令脉冲和DSP的接口电路图。
图3 指令脉冲的硬件接口电路 图3中,脉冲序列先通过差动驱动芯片AM26LS31,生成互补的两个脉冲信号,然后通过光耦与DSP控制芯片隔离。该设计同时满足电路的抗干扰性和隔离性。方向信号输入的接口电路与图3类似。 4 实验 本文的伺服系统采用交流永磁同步伺服电机,其额定功率2.5kW,额定电流10A,额定转速2000r/min,额定转矩6N·m,定子电感8.5mH,定子电阻2.8Ω。实验中功率模块采用三菱公司的PM30RSF060智能模块,输入电压AC220V,开关频率15kHz,位置环采样周期T=333μs,角度反馈采用2500脉冲/转的光电码盘,4倍频使用。图4所示的是伺服系统在空载条件下的定位过程,其中电机转过的角度由给定脉冲个数决定。通过串口通信获得,图4中横坐标代表时间轴,数值代表点数,两个点的间距为2ms,纵坐标代表电机的位置标度。从图中可以看出,电机在定位过程中没有位置超调,而且完成整个定位过程大约为50ms,满足实际的应用要求。
图4 伺服系统的定位过程 5 结语 本文通过对伺服系统位置环结构的分析,给出了软件实现位置环的方法。同时通过对电子齿轮原理的分析,给出了电子齿轮的设计方法以及硬件接口电路。实验结果表明,设计的位置环和电子齿轮在完成定位过程中具有无超调,精确定位的特性,同时具备了较高的定位速度。因此,该设计方法适用于高性能伺服定位系统中。 |
全数字伺服系统中位置环和电子齿轮的设计




- 全数字(6793)
- 伺服(42957)


相关推荐
热点推荐
伺服系统在工业机器人的应用
工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
2022-09-09 14:21:38 2755
2755
2755交流伺服系统的应用
交流伺服系统包含交流伺服驱动器和伺服电机。选用伺服系统,主要为了进行精密的定位控制,伺服驱动器在位置控制模式下运行,控制框图如图一所示。
2022-12-05 10:03:413383
3383伺服电机的速度靠速度环
伺服系统控制电机速度靠速度环;电机的速度,直流电机决定电压的高低,交流电机决定频率的高低;所以速度环的调节器输出端控制的是交流电机的频率,或者是控制着直流电机的电压;速度环是如何检测电机速度
2018-10-12 10:36:47
伺服系统是什么意思
伺服系统的发展趋势1、交流化伺服技术将继续迅速地由DC伺服系统转向AC伺服系统。从目前国际市场的情况看,几乎所有的新产品都是AC伺服系统。在工业发达国家,AC伺服电机的 市场占有率已经超过80
2021-09-10 07:56:26
伺服系统的发展方向简单介绍
完全数字化的伺服系统。全数字化的实现,将原有的硬件伺服控制变成了软件伺服控制,从而使在伺服系统中应用现代控制理论的先进算法(如:最优控制、人工智能、模糊控制、神经元网络等)成为可能。 (3)采用新型
2019-06-24 05:00:50
全数字锁相环的设计及分析
Phase-Locked Loop)逐步发展起来。所谓全数字锁相环,就是环路部件全部数字化,采用数字鉴相器、数字环路滤波器、数控振荡器构成锁相环路,并且系统中的信号全是数字信号。与传统的模拟电路实现的锁相环
2010-03-16 10:56:10
齿轮伺服电机是旋转运动控制技术的最佳选择吗?还是有更好的解决方案吗?
伺服系统一般无法达到这 一理想状态。 在典型的伺服系统中,齿隙(backlash) 是由传动元件的机械公差引起的电机与负载之间的运动损失。这包括整个齿轮箱、皮带、链条和联轴器的运动损失。在机器启动时
2023-03-09 15:11:35
AMEYA360设计方案丨交流伺服系统解决方案
技术和功率电子技术的飞速发展,数字信号处理器 (DSP),智能功率模块(IPM) 出现等,促使交流伺服控制系统向全数字 化、智能化、小型化、高速、高精度方向发展。`
2018-05-23 17:10:25
SN2000全数字交流伺服系统使用说明书
SN2000全数字交流伺服系统使用说明书前 言感谢您选用 SN2000 交流伺服系统。本手册提供了使用本系统所需知识及注意事项。操作不当可能引起事故。在使用本系统之前,务必仔细阅读本手册 !* 由于
2021-09-13 09:06:21
交流伺服电机在数字控制系统中的应用
步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中
2021-09-17 06:02:23
什么是开环/闭环/半闭环进给伺服系统?
装置(直线感应同步器、长光栅等)对数控机床工作台位移进行直接测量并进行反馈控制的位置伺服系统,其控制原理见图 闭环控制系统将数控机床本身包括在位置控制环之内,因此机械系统引起的误差可由反馈控制得以消除
2023-03-21 17:53:51
基于Labview的气动伺服系统辨识
基于Labview的气动伺服系统辨识程序,哪位朋友做过的帮帮忙,搭建的系统跟论文《基于 LabVIEW 的气动比例伺服系统模型辨识研究》中的模型一样。
2016-04-19 15:56:52
机器人热潮中的伺服系统
和伺服机构控制的重要部分。因而要了解机器人的运作过程,必然绕不过伺服系统。伺服系统伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。伺服系统除了可以进行速度与转矩控制
2018-10-12 11:01:08
机电伺服系统在低频模态负载状态下极限环结构谐振的机理及预防措施
针对机电伺服系统在低频模态负载状态发生极限环结构谐振现象进行机理分析,辨识负载效应模型,针对性进行避免极限环结构谐振的试验,并对试验效果进行分析。仿真和试验结果表明,该方法能使系统负载谐振频率得到提高,极限环结构谐振现象消失,显著改善伺服系统的动态性能。
2021-01-28 06:55:48
请问如何实现轴角编码器在伺服系统中的应用?
如何实现轴角编码器在伺服系统中的应用?ZSZ数字化轴角编码器模拟速度反馈信号的处理方法是什么?怎么进行ZSZ轴角编码器数字位置信号的采集和远距离传输?
2021-04-20 06:49:44
进给伺服系统
本章将详细讨论进给伺服系统的软件硬件结构;进给伺服系统基本功能的原理及实现方法。进给伺服系统是数控系统主要的子系统。如果说CNC装置是数控系统的“大脑”,是发布
2009-02-16 00:21:31 0
0
0雷达伺服系统的数字化
伺服系统是雷达的重要组成部分,它对于搜索目标、跟踪目标以及精确测量目标的位置和其它参数起着重要作用,将性能优良的模拟伺服系统进行数字化,不仅可以继承原模拟系统的优
2009-04-21 15:33:0619
19位置伺服系统中角速度检测方法综述
位置伺服系统中先由位置给定量与反馈量的差值经过位置调节器的调节产生速度给定量,再由速度给定量与速度反馈量的差值经过速度调节器的作用最终实现准确的定位。由上述位
2009-07-02 08:53:3719
19转角-线位移式全闭环位置伺服系统及误差分析
转角-线位移式全闭环位置伺服系统及误差分析::在一些精度要求比较高的应用场合,半闭环的位置伺服系统不能满足要求。文中提出采用转角-线位移式全闭环位置控制方法,光栅
2009-07-05 21:34:2121
21基于Kalman滤波的无位置传感器感应电机伺服系统的研究
对于感应电机,现在大多数的无位置传感器伺服系统采用磁通积分法、波形检测法等,但精度较差,且容易受到干扰。文章提供了一种基于Kalman 滤波的无位置传感器感应电机伺服系统,
2009-07-07 08:46:5123
23基于控制器(C166v2)单片机系统的全数字交流伺服系
基于控制器(C166v2)单片机系统的全数字交流伺服系统的研究"微处理器的高速发展使得交流伺服系统的全数字化、智能化和低廉的费用成为现实。本文采用英飞凌公司电机专用控制
2009-08-24 18:58:0417
17全数字永磁交流伺服系统的离散模型的研究
全数字伺服系统的仿真多数是以连续的理想模型为基础,而且是偏重于控制规律、算法的仿真研究,这种仿真与实际离散模型有一定的差距。针对以上问题,对全数字伺服系统的模
2009-10-16 08:46:1916
16旋转变压器—数字转换器AD2S83 在伺服系统中的应用
旋转变压器—数字转换器AD2S83 在伺服系统中的应用
在伺服系统中,需要实时地检测出电机转子的位置,包括转子的绝对位置和增量式位置,同时还需检测出
2009-11-26 11:45:4255
55基于ADRC的低速位置伺服系统及其仿真
低速位置伺服系统中的非线性摩擦力、参数摄动以及外部扰动等因素都会降低系统的精度. 本文对无刷直流电机低速位置伺服控制方法进行了研究. 简要介绍了自抗扰控制器,利用Stribe
2010-03-01 16:31:4443
43数字控制仿真转台电液位置伺服系统研究
摘要:本文针对三轴转台电液位置伺服系统的特点,从满足系统高技术指标的要求出发,提出了由单片机构成的位置反馈信号检测电路的数字控制系统。通过软件算法来实现液压控
2010-05-18 09:40:1528
28
基于AD2S83的角位置检测系统及其在雷达伺服系统中的应用?
【摘 要】 对旋转变压器-数字变换器(RDC)集成电路AD2S83进行了介绍,并简述了它在雷达伺服系统中的应用。
2009-05-11 19:42:211761
1761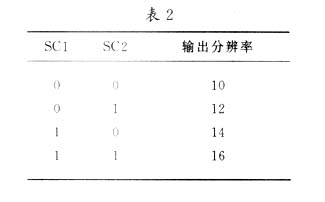
基于CAN总线的分布式位置伺服系统设计
随着计算机技术和现场总线技术的发展和成熟,也促使伺服系统的实现方式和体系结构在不断地发展,将现场总线应用于运动控制,构成分布式控制的数字控制伺服系统日益受到人们的重视。基于现场总线的分布式伺服系统有很多优点,如连线少、可靠性高、易于系统的维
2011-01-19 10:19:112065
2065
全数字直流伺服系统设计
本文从设计环形倒立摆/伺服系统教学实验仪出发,首先分析了实验仪的总体 设计结构和目标,然后从伺服系统教学实验仪的角度出发,分析全数字直流伺服 系统的工作原理,设计系统。该系统包括DSP最小系统、PWM的直流电机驱动 部分,A/D采样,正反转码盘电路等
2011-03-09 16:29:47123
123高性能直线伺服系统的研究
针对永磁同步直线电机伺服系统采用传统的比例或比例积分位置调节器时动态性能差,本文将前馈控制应用于位置环以改进系统的动态性能,并对其进行了理论分析。利用仿真软件对该
2011-06-22 16:34:1543
43位置伺服系统控制算法的研究
传统 PID控制 在伺服系统高精度位置跟踪和改善系统品质方面已露出诸多不足,且系统中存在的控制干扰和测量噪声会在很大程度上影响伺服系统的跟踪精度。提出一种带有卡尔曼滤波器
2011-07-06 16:05:35114
114伺服系统介绍
伺服系统按其驱动元件划分,有步进式伺服系统、直流电动机伺服系统、交流电动机伺服系统。按控制方式划分,有开环伺服系统、闭环伺服系统和半闭环伺服系统等。
2011-07-10 17:15:042854
2854
伺服系统传递函数的全数字测量方法
伺服系统传递函数的全数字测量方法介绍了基于全数字模式的频域测定法,在基于传统自动控制理论测量 传递函数 的基础上,省略了频率分析仪、测速机和示波器等设备,并于文中实验部
2011-07-25 14:53:5629
29永磁同步电机全数字伺服系统硬件设计
分析了 永磁同步电机 伺服系统的原理,采用以TM$320LF2407A为核心的控制电路,智能功率模块PM20CSJ060的功率主回路等,给出了一种基于高性能DSP的全数字交流伺服系统的硬件电路的设计。
2011-08-15 14:23:4795
95基于偏执电流的双电机伺服系统消隙
由于随动系统的传动过程中存在齿隙,机械传动系统中齿轮轮齿的间隙会形成非线性位置误差,它影响着系统的动态性能和稳态精度,所以在伺服系统中消除齿隙十分必要;通过分析双
2012-08-08 11:28:2830
30步进电机开环伺服系统解析,开环步进伺服系统的工作原理
步进电机伺服系统是典型的开环控制系统,指令信号是单向流动的。开环系统没有位置和速度反馈回路,省去了检测装置,其精度主要由步进电机来决定,速度也受到步进电机性能的限制,系统简单可靠,不需要像闭环伺服系统那样进行复杂的设计计算与试验验证。
2017-06-12 15:32:5817694
17694
伺服系统浅析,伺服系统的分类、结构组成与技术要求
伺服系统,亦称随动系统,是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度或力输出的自动控制系统。大多数伺服系统具有检测反馈回路,因而伺服系统是一种反馈控制系统。
2017-06-12 16:01:229568
9568开环位置伺服系统及现代交流伺服系统的解析
以快速、精确跟踪为主要目标的位置伺服系统,是现代高科技各领域中不可缺少、应用十分广泛的一种自动控制系统。在历经开环、电气.液压、直流电气伺服的发展历程之后,现已进入交流电气伺服迅猛发展的时代。本章
2017-11-08 09:59:217
7什么是伺服系统,步进电机和伺服电机的区别
伺服驱动系统(Servo System)简称伺服系统,是一种以机械位置或角度作为控制对象的自动控制系统,例如数控机床等。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量( 使用在机电
2017-11-10 16:05:0113178
13178伺服系统基于工业电子的设计方案汇总
、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。本文为大家介绍在工业中伺服系统的几种设计方案,以供参考。
2018-02-20 18:13:001439
1439
PID控制在交流位置伺服系统中的应用
对于交流位置伺服控制系统而言,采用基于pc机的开发平台,用常规的pid调节器进行控制,只要参数整定适当,加之系统的机械精度(运动轴、齿轮、电机丝杠传动化)控制在一定误差范围内,电气控制精度(编码器脉冲)就可得到提高
2018-02-08 19:20:094167
4167
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成
本文开始介绍了伺服系统的概念和伺服系统主要作用,其次阐述了伺服系统的分类与基本要求,最后阐述了伺服系统主要特点和基本组成结构。
2018-03-27 08:43:2423294
23294伺服系统什么意思_伺服系统的作用是什么
本文主要介绍什么是伺服系统,首先介绍了伺服系统的结构及特点,其次介绍了伺服系统作用、分类及性能要求和参数,最后阐述了伺服系统的发展趋势。
2018-04-28 17:08:5635214
35214现代交流伺服系统原理及控制方法
现代交流伺服系统,经历了从模拟到数字化的转变,数字控制环已经无处不在,比如换相、电流、速度和位置控制;采用新型功率半导体器件、高性能DSP加FPGA、以及伺服专用模块(比如IR推出的伺服控制专用引擎)也不足为奇。本文主要介绍了现代交流伺服系统原理及控制方法,具体的跟随小编一起来了解一下。
2018-05-02 10:17:027379
7379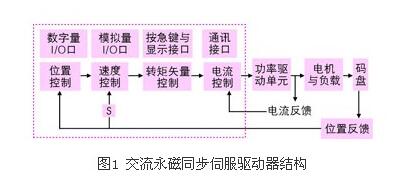
伺服系统应用于哪儿_伺服系统应用实例
本文首先介绍了伺服系统的组成,其次介绍了伺服系统的特点、作用及分类,最后阐述了伺服系统应用领域、应用趋势及实例,具体的跟随小编一起来了解一下。
2018-05-31 10:35:0317251
17251
伺服系统设计验证流程解决方案
伺服系统广泛应用于航空航天、兵器、船舶、工业自动化等领域,随着伺服系统交流化、数字化、集成化的发展趋势,提高伺服系统的开发效率显得尤其重要。传统的伺服系统开发设计主要由需求分析、设计、实现及测试
2019-04-05 11:44:001567
1567伺服系统调试步骤
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
2019-10-30 09:44:477147
7147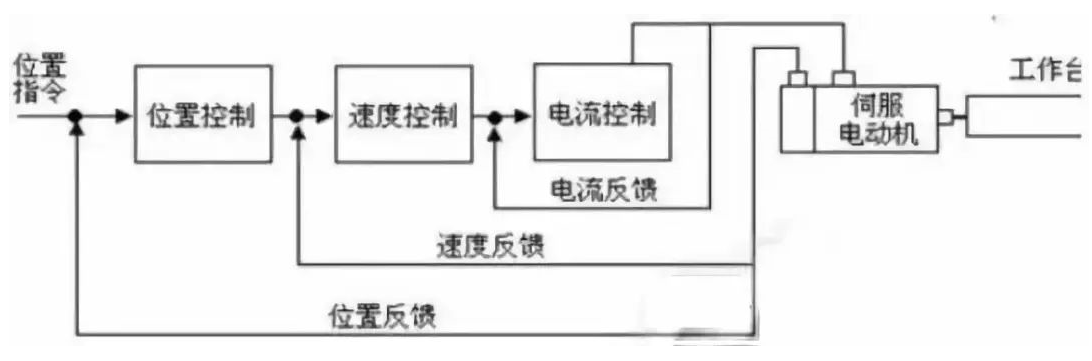
基于高性能数字信号控制器在伺服系统中的功能及应用设计
对于伺服系统,相电流采样精度直接影响整个伺服系统的性能。因此采样电路和保护电路都是围绕电流环内的电流值设计。F28334处理和比较采样得到的电流,进而输出PWM波进行相应控制。系统框图如图l所示。
2020-05-03 11:28:001726
1726如何提高伺服系统负载谐振频率,消失极限环结构谐振现象?
《机电伺服系统在低频模态负载状态的极限环谐振现象影响因素分析》
供稿:京精密机电控制设备研究所
汤力、李清、冯立墨、杨艳丽
摘 要:
针对机电伺服系统在低频模态负载状态发生极限环结构谐振现象进行
2021-01-27 08:59:056
6中国伺服系统产业发展预测
伺服系统的发展与伺服电机的发展紧密相联,经历了三个主要发展阶段:20世纪60年代以前,以步进电动机驱动的液压伺服马达或以功率步进电动机直接驱动为中心,伺服系统的位置控制为开环系统。
2022-11-30 12:36:301304
1304聚焦伺服系统差异化国产解决方案
伺服系统是一个复杂且精密的重要结构件,高性能的伺服系统可以提供灵活、方便、准确、快速的驱动,而随着伺服系统向全数字化、交流化、高度集成化以及智能化方向发展的趋势,对服务伺服系统的线束产品也提出了新的挑战。
2023-02-06 11:38:512212
2212伺服系统的工作原理
伺服系统的工作原理 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意
2023-02-08 14:11:463657
3657交流伺服系统组成_交流伺服系统工作原理
交流伺服系统通常由以下几个主要组成部分构成:
交流伺服电机:交流伺服电机是伺服系统的核心部件之一,它的转速、力矩和位置等运动状态能够受到精密控制。常用的交流伺服电机有感应电机和永磁同步电机等。
2023-03-07 14:15:364663
4663交流伺服系统的分类及应用场合
交流伺服系统按照电机类型的不同可以分为两种:异步伺服系统和同步伺服系统。根据控制器的不同,交流伺服系统又可以分为模拟伺服系统和数字伺服系统。
2023-03-07 14:20:442087
2087机电伺服系统有哪些_机电伺服系统工作原理
机电伺服系统广泛应用于各种机械设备中,其种类和形式多种多样。以下列举一些常见的机电伺服系统:
伺服电机系统:伺服电机系统是一种利用电机控制机械运动的伺服系统,它通常包括电机、编码器、控制器
2023-03-07 14:31:082674
2674伺服系统原理及分类
出现信号,被控传动装置停止动作直到控制信号的来临。2.伺服系统分类(1)根据其作用对象的不同,可分为位置伺服系统和速度伺服系统两大类。1)位置伺服系统是指能够对目标指令
2023-08-27 08:08:424242
4242
伺服系统构成及其工作原理
伺服系统主要由伺服驱动器、编码器和伺服电机等部件构成。伺服系统是一种自动控制系统,能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服驱动器在接收下达的控制命令后,会发
2023-08-27 08:08:513589
3589什么是伺服系统?伺服系统的分类、组成及特点
伺服系统(servomechanism)又称 随动系统 ,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化
2023-09-27 10:30:365893
5893
运动控制器关于电流环、速度环、位置环的优化
通常情况下,伺服系统由电流环、速度环以及位置环组成,3个闭环是由内到外互相包容的。也是就说,速度环包含电流环,而位置环又包含速度环。在极少数场合中,还会遇到只有位置环与电流环的情况,不过只是在特殊应用中。典型的三环控制回路如下图所示。
2023-10-08 11:13:117159
7159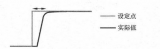
基于EtherCAT通信有限时间位置收敛伺服系统设计
针对高动态性能、高稳态精度的伺服系统,设计了有限时间位置控制器,实现了系统在变化的位置指令下,柔顺地从当前位置运动至目标位置。
2023-10-18 11:39:471650
1650
基于TMS320LF2407A DSP的全数字舵机伺服系统设计
电子发烧友网站提供《基于TMS320LF2407A DSP的全数字舵机伺服系统设计.pdf》资料免费下载
2023-10-23 09:53:310
0一文了解机器人伺服系统
工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
2023-11-01 09:32:282488
2488
交流伺服系统的分类及应用场合
交流伺服系统的分类及应用场合交流伺服系统按照电机类型的不同可以分为两种:异步伺服系统和同步伺服系统。根据控制器的不同,交流伺服系统又可以分为模拟伺服系统和数字伺服系统。异步伺服系统:异步伺服系统
2023-11-03 08:07:411891
1891直流伺服系统的结构与工作原理
直流伺服系统作为一种重要的电气传动控制系统,在自动化领域中发挥着至关重要的作用。其结构复杂而精密,工作原理独特,能够实现精确的位置和速度控制。本文将详细介绍直流伺服系统的结构和工作原理,并结合相关数字和信息进行阐述。
2024-06-12 11:10:512495
2495伺服系统基本概念和与变频的关系
伺服系统的基本概念是准确、精确、快速定位。这一概念贯穿于伺服系统的设计理念和运行机制中。为了实现这一目标,伺服系统采用了多种先进的控制策略和技术手段。其中,变频技术是伺服控制的一个必不可少的内部环节
2024-08-27 15:59:321352
1352松下伺服电机电子齿轮比怎么设置
电子齿轮比(Electronic Gear Ratio)是伺服系统中用于调整编码器分辨率和电机转速之间关系的参数。在伺服系统中,电子齿轮比的设置对于确保系统性能和精度至关重要。 基本步骤 了解系统
2024-09-07 09:46:473869
3869伺服系统工作原理解析 伺服系统在自动化中的应用
伺服系统工作原理解析 伺服系统是一种可以按照外部指令进行人们所期望的运动的自动控制系统,它能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服系统主要由伺服驱动器、编码器
2024-12-10 10:12:042956
2956伺服系统与步进电机的区别 如何选择合适的伺服系统
,它通过编码器反馈实际位置信息,控制器根据偏差调整电机的运动,以实现精确控制。 步进电机 :步进电机是一种开环控制系统,它通过接收脉冲信号来控制步进角度,不依赖于反馈信号。 2. 精度 伺服系统 :伺服系统能够提供极高的
2024-12-10 10:13:291673
1673伺服系统在机器人中的作用 伺服系统与传统电机对比
伺服系统在机器人中的作用 机器人技术是现代工业自动化的重要组成部分,它涉及到机械、电子、计算机科学、控制理论等多个学科。在这些技术中,伺服系统扮演着至关重要的角色。伺服系统是一种能够精确控制机械设备
2024-12-10 10:18:412304
2304伺服系统在CNC机床中的应用
伺服系统在CNC机床中的应用至关重要,它作为CNC机床的“执行机构”,负责精确执行由CNC装置(数控系统)发来的运动命令,控制机床的移动部件(如工作台、滑块等)按照预设的路径和速度精确移动。 一
2024-12-10 10:25:151591
1591- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 张迎辉:mikezhang@elecfans.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1
评论