 电子发烧友App
电子发烧友App


随着微型电子技术的发展以及成本的降低,数字式控制系统在现代工程机械中得到了越来越广泛的应用,基于CAN总线的控制系统在现代工程机械中正在逐渐普及。数字式自动找平控制系统可提高沥青混凝土摊铺机的性能,改善操纵性等,由于具有高可靠性和灵活性。因此对其研究具有重要的现实意义。实现数字式控制系统的方案很多,笔者所研制的控制系统是基于CAN总线,以C8051F040单片机为核心而设计的。
2 CAN总线的特点
CAN(Controller Aera Networ)总线是德国BOSCH公司在80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。
CAN总线与其他总线相比有如下特点:
1)CAN总线是多主总线结构,即每个节点机均可成为主机,且节点机之间也可相互通信。
2)CAN总线通信接口集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余校验、优先级判别等。
3)通信介质可以是双绞线、同轴电缆或光导纤维,通信速率最高可达1 Mb/s。
4)CAN协议的一个最大特点是废除了传统的站地址编码,取而代之是对通信数据块进行编码。数据块的标识码可由11或29位二进制数组成。因此可以定义11或29个不同的数据块,这种数据块编码方式还可使不同的节点同时接收相同的数据。
5)数据段最大长度为8位,可以满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时8位不会占用总线时间过长,从而保证了通信的实时性。
6)CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
CAN总线具有通信速率高、结构简单、可靠性强的特点,因此。选用CAN总线作为控制器通信方式可以较好地满足系统要求。
3 摊铺机自动找平控制系统设计
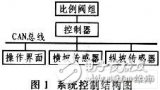
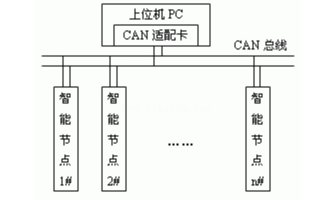
自动找平控制系统是根据测量面距基准面(线)的距离,自动调节电磁阀实现自动找平。该控制系统是由控制器、横坡传感器、纵坡传感器。显示器单元及电缆组成。系统控制结构如图1所示。纵坡传感器可选配接触式、超声波、超声波平衡梁、激光等不同形式的传感器件。纵向控制器、横向控制器、显示器和传感器采用模块化设计以满足各自不同的控制要求。模块之间通信采用CAN总线方式。模块化设计有利于系统集中操作以及系统扩展。

系统中控制器根据相应的传感器信号控制电磁阀动作;显示器为可选单元,安装在操作室内,显示每个控制器的参数和信息,还可以通过按钮控制相应的控制器。
3.1 控制器
控制器为自动找平系统的核心部分。数据处理部分采用C8051F040单片机。C8051F040是由美国Cygnal公司生产的完全集成的混合信号系统级芯片SoC(System on Chip),具有与8051指令集完全兼容的CIP-51内核。它集成了构成单片机数据采样或控制系统所需的所有模拟和数字外设及其他功能元件。C8051F040包括64 kB Flash、4352 B RAM、CAN控制器2.0、2个串行接口、5个16位定时器、12位A/D转换器、8位A/D转换器、12位D/A转换器以及6个PCA模块等.它内部还带有JTAG接口,使调试非常方便。通讯部分主要采用C8051F040内部集成的CAN控制器,并留有其他主流通讯接口。基于CAN总线的设计可以随意扩展任何新型传感器,实现多种找平控制功能。
3.1.1 显示功能
LCD显示:数字液晶显示屏采用香港精电公司的DMF-50840点阵图形液晶显示模块,其特点如下:分辨率320x240;亮度350流明;分区显示系统状态。包括左右纵坡显示区及横坡显示区;液晶接口使用CPU总线、CPLD、显存进行扩展;采用组合显示,可读性强。显示控制器向上、下输出;显示坡度值及方向、超高值及方向、灵敏度、控制器参数和故障信息等。
LED显示:仅用于指示当前阀驱动方向。它指示方向与LCD的箭头方向一致。当操作人员处于距控制器较远的位置时。LED的作用就会非常明显。
功能指示灯:用于自动功能指示、方向指示、基准绳功能指示。
3.1.2 菜单功能
功能选择和参数设置,包括:横坡传感器识别;显示横向所测的的坡度数;传感器选择;选择相应的传感器类型;外部控制设置;是否允许其他设备(如显示器键盘等)的控制命令有效,利用该功能来确定是否允许这一命令参与控制器的操作。
灵敏度设定:如果配置不同类型的传感器,系统的灵敏度要重新设置。调节范围为1(低灵敏度)至10(高灵敏度),这组数据实际上是针对受很多因素影响的“死区”、“比例区”两个参数而设置的。纵向传感器和坡度传感器需要分别设置。如果需要更换传感器,则灵敏度值会自动保存。如果系统在自动状态下工作很不稳定,则需要降低灵敏度。
控制范围设定:如果外部需要的控制偏差超过预先设定的控制范围,系统将认为是故障信号,控制器将停止有关的驱动。仅对纵向传感器有效。
长度单位设定:预设显示值的长度单位。长度单位可在“厘米”、“英寸”选择。仅对纵向传感器有效。
位置系数:位置系数=执行部件的位置变化/传感器产生的位置变化,实际下降高度=传感器位置变化×位置系数。仅对纵向传感器有效。
自检:检测控制器状态。
3.1.3 操作模式选择
包括自动模式(可以改变设定值,控制器自动工作,执行部件将被驱动)、半自动模式(可以改变设定值,控制器无输出)、手动模式(控制器停止自动工作,不改变设定值)。
控制器还具备以下功能:
零点设置:设定标准值;自动识别传感器的类型;故障诊断功能;检测出由传感器,电磁阀,连线或操作程序而出现的错误,并显示出信息或以声,光信号提示;系统上电时,控制器自检;具有驱动电磁阀电路;校正功能;当显示值与实际值不等时,需要进行参数校正;电源极性保护、电压瞬变保护。
3.2 横坡传感器
采用SEIKA固态角度传感器NB43210,具有模拟信号输出,倾角灵敏度0.2°,全密封,用于检测执行部件的坡度值。CPU选用C8051F040,采用其内置CAN总线接口,外部进行光电隔离。
3.3 纵坡传感器
可选配接触式、超声波、超声波平衡梁等不同形式的传感器件。
接触式:旋转电位计采用导电塑料电位器WDD35D系列,阻值1 kΩ~5 kΩ.独立线性度0.2%。转轴可以自零点位置向两个方向转动,利用其机械部件感应参考面进行距离检测。经过C8051F040处理。通过CPU内置CAN总线接口发送,外部进行光电隔离。要求基准绳和参考面固定可靠。
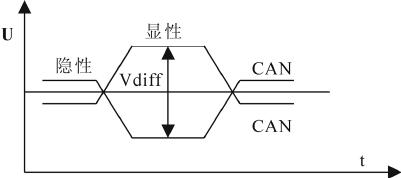
非接触式:超声波传感器常采用多探头超声波技术。如图2所示。该传感器通过多点探测可以精确检测到面或线的细微变化,经过微处理器处理,通过CAN接口发送给控制器。如果测量的是基准地面,对一个超声波探头其原理可用公式表示为:
L=1/2vt
其中t为传播时间,v为已知超声波在介质中的传播速度。超声波传播速度受温度、空气介质等环境因素的影响。这可以通过校准超声波探头检测L1间的超声波传播时间t1来进行校正,即由L1=1/2vt1可得V=2L1/t1,于是有L=t/t1L1。超声波传感器为非接触式测量,使用方便。

4 结束语
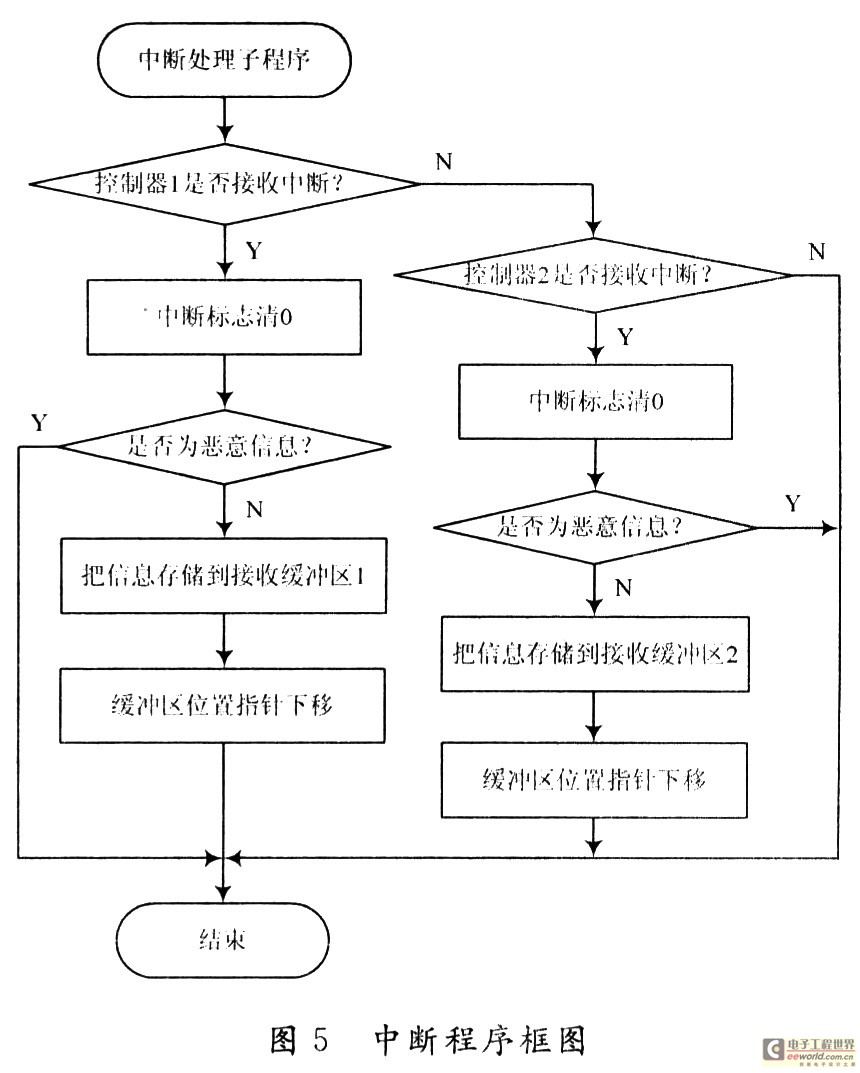
数字式控制系统的人机界面友好,操作简单,通过显示器可以清楚地了解具体的偏差值和方向;通过修改软件可以实现不同的控制方法;可以实现系统的智能化。具有故障分析能力,并发出报警信号,将事故消灭在萌芽状态,减少经济损失;以微处理器为核心的数字式控制器可以方便地实现控制器间的通讯。采用CAN总线通信方式使整个系统的结构更加紧凑,系统更加可靠,更具有实用性,易于系统及功能扩展。











 工商网监
工商网监
评论