 电子发烧友App
电子发烧友App


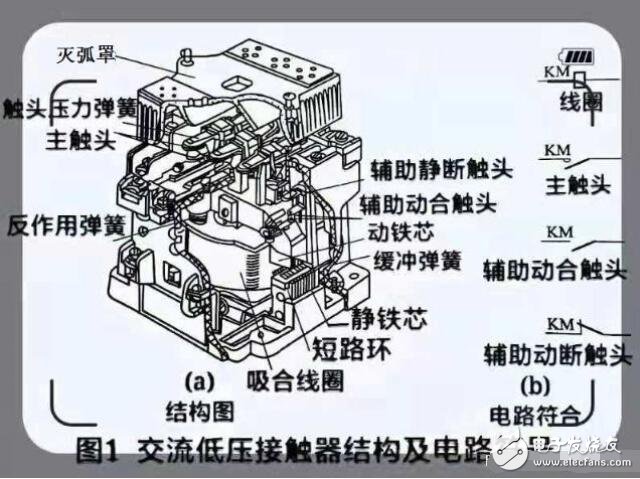
电磁机构是接触器的感测部分,在接触器中占有重要位置。根据智能交流接触器的工作特点,对其电磁机构的动态过程进行动态分析 ,提出智能交流接触器吸合过程动态控制的概念 。该概念是应用智能控制系统按不同电源电压(激磁电压) 调节控制参数,如合闸相位角、吸合过程强激磁的接通和断开时间等,由此改变铁心在吸合过程中的运动速度,减少铁心撞击,消除接触器的主触头在吸合过程中的1 、2 次弹跳,从而减少触头磨损,提高各项性能指标,并节约能量。为了达到减少动、静铁心在闭合瞬间的撞击速度,消除触头弹跳的目的,智能交流接触器吸合过程动态控制概念的内容之一是通过以单片机为核心的智能控制系统,调节强激磁控制元件的导通和截止时间,从而改变吸合过程,实现不同的强激磁控制方案。强激磁控制方案有不分段控制方案与分段控制方案2 种。
图4 为强激磁不分段控制方案 。图中t1 为智能控制系统检测到采样电压零点以后延时的时间( t1 处即合闸相角) , t2 为强激磁时间。在确定接触器可靠闭合后,将强激磁关断,只留下吸持电压维持接触器正常工作。由于确定完全吸合后才关断强激磁信号,所以随着铁心行程的增大以及速度的增加,难以大幅度减少动、静铁心之间的碰撞和消除在吸合过程中动静触头之间的弹跳。
.bmp)
图5 为强激磁分段控制方案 。图中t1 为合闸时刻(选定的合闸相角) ; t2 为强激磁回路导通的时间; t3 为关断强激磁的时间; t4 为重新触发强激磁回路导通的时间。再次关断强激磁控制回路,使接触器铁心依靠惯性完成吸合任务,实现吸合过程的“软着陆”,将铁心之间的撞击能量降到最小,触头之间的1 、2 次弹跳大大减少甚至完全消除。实验表明,采用上述控制方案后,在不同的电网电压下吸合过程的动态吸力特性都可以和接触器的反力特性很好地配合,能明显减少触头振动,提高接触器的机械寿命和电寿命;在运行过程中采用智能控制可以减少接触器所消耗的功率, 大幅度节能。
.bmp)
4. 2 零电流分断控制技术
零电流分断控制技术即电流零点分断控制技术,是智能交流接触器的关键技术。交流电弧过零熄灭的原理是触头间隙的介质恢复强度高于电压恢复强度 。理想的情况是:如果能使交流接触器的触头在电流过零瞬间分开,并在瞬间将触头拉开到足以承受恢复电压而不发生击穿的距离,则此时触头间隙就不会产生电弧。同时,由于在电流过零瞬间弧隙处介质状态,只需较小的极间距离,就可以承受较高的恢复电压。然而,实际情况并非如此。实际上交流接触器零电流分断技术是让接触器触头在电流过零前的一个小区域内分开 。与普通交流接触器相比,其大幅度降低了电弧的能量,从而提高触头间隙承受恢复电压的能力,保证电弧电流过零后不重燃。
以最常见的三相中线不接地感性负载系统为例,讨论其首开相分断的问题。三相平衡工作系统电压、电流波形示意图如图6 所示。
.bmp)
由图6 可知,在三相平衡系统工作过程中,必有一相电流最先过零点。若接触器触头在图中的第Ⅰ相角区打开,那么B 相电流首先过零,B 相为首开相。如果B 相触头电弧在电流过零点熄灭,电路中的电流变为线电流ICA , IB 的零点正好对应ICA 的峰值,即再过5 ms 时间过零,故A、C 两相燃弧时间等于B 相燃弧时间加上5 ms。由于在分断过程中无法确定哪一相触头首先熄灭电弧,故在传统的交流接触器中,触头系统的灭弧均按首开相的电弧来考虑其触头系统的灭弧能力。采用新型的触头结构 ,首开相触头的开距大于其余两相在结构上实现非首开相触头的打开时刻,比首开相触头打开时刻滞后约5 ms。因而,只要控制好首开相触头的打开时刻,就可实现三相触头系统的零电流分断控制。
5 交流接触器的发展
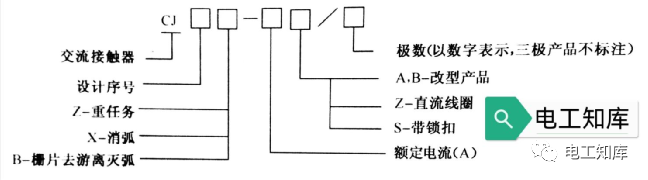
为了适应工业自动化控制系统发展和国际市场竞争的需要,交流接触器应具备以下主要特点:①小型化、安全化、可靠、多功能组合化模块结构;②全系列采用塑料灭弧罩,提高分断性能,减小非弧区域; ③电流规格增加,从63~800 A ,电流等级一般在15 个规格以上; ④ 容量交流接触器一般采用节能型磁系统,发展真空接触器,以提高分断性能和电寿命; ⑤发展4 级接触器,以满足不同控制系统需要; ⑥在交流接触器上加装电子式保护与控制模块和计算机通讯接口,进而发展成为智能型交流接触器。
6 结 语
由于成本数倍于原来交流接触器,该电器应用的领域受到很大的局限,在一定程度上又影响了智能交流接触器的进一步发展。因此,智能交流接触器在今后的研究中,既要注重理论方面的探讨,又要加强经济性能方面的“降本”,提高智能交流接触器的性价比,这样才能进一步促进智能交流接触器的研究与应用。










 工商网监
工商网监
评论