 电子发烧友App
电子发烧友App


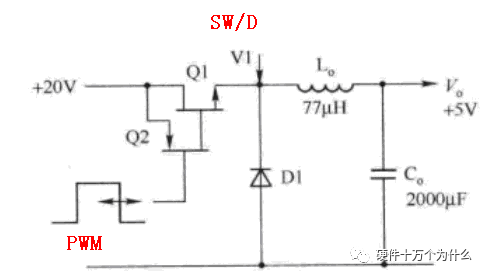
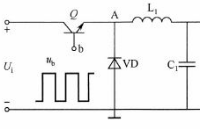
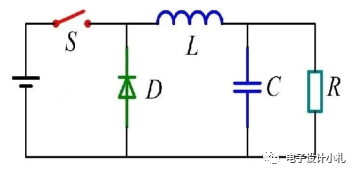
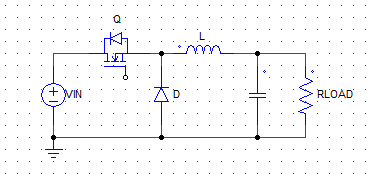
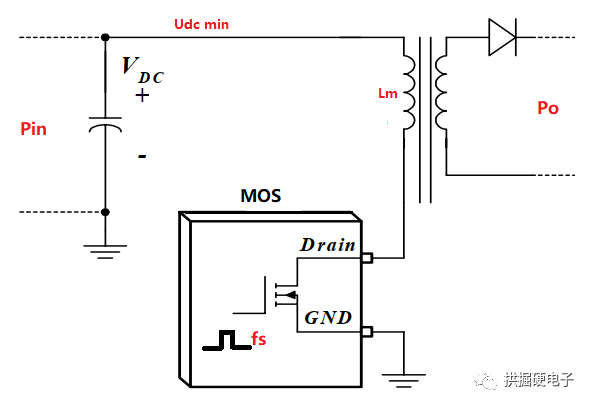
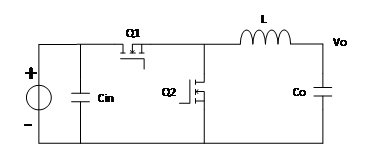
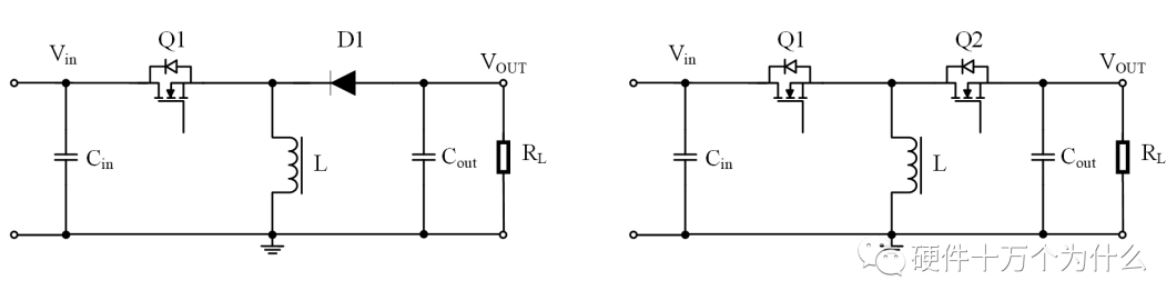
一、Buck开关型调整器:
二、CCM及DCM定义:
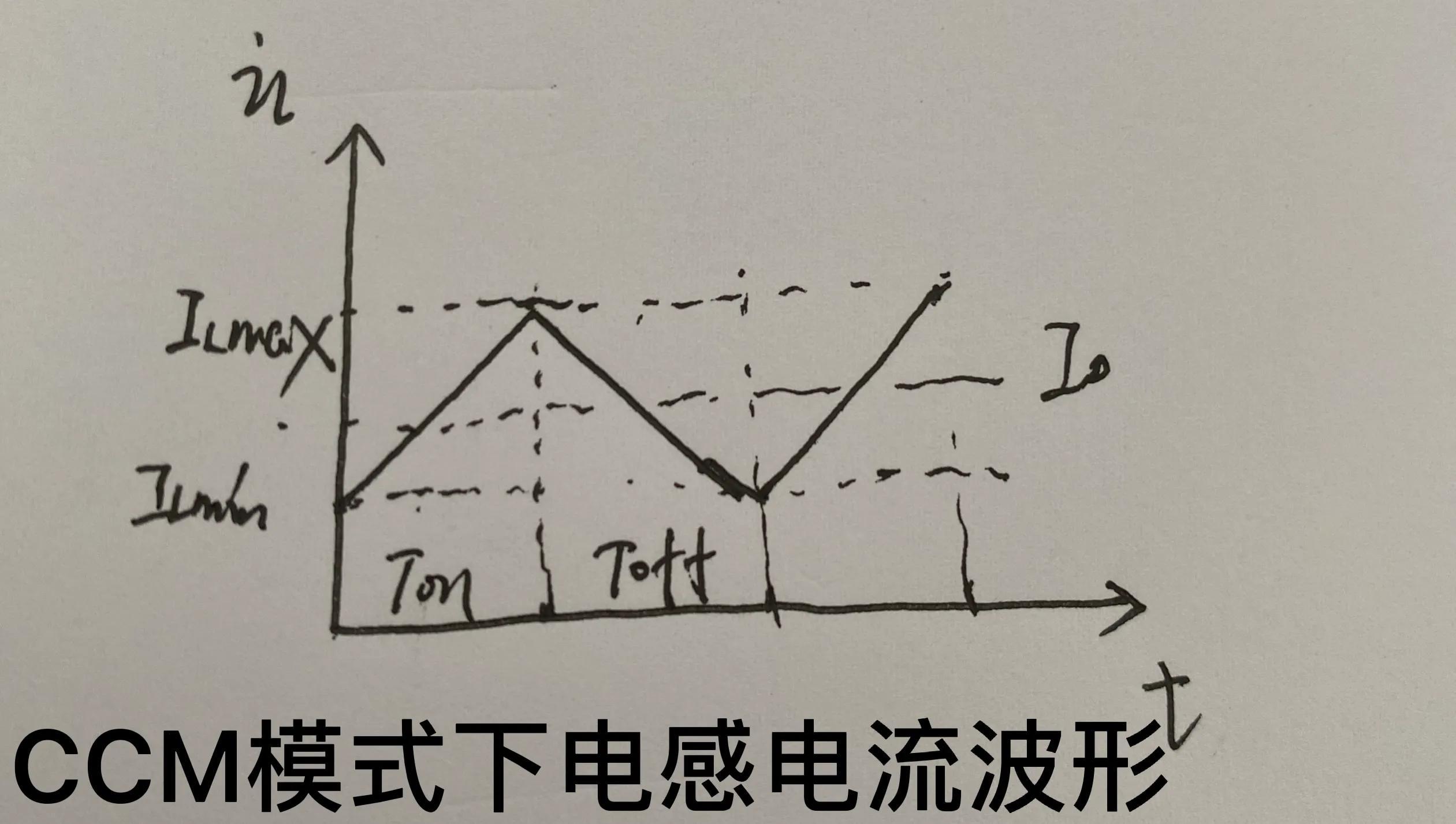
1、CCM (ContinuousConduction Mode),连续导通模式:在一个开关周期内,电感电流从不会到0。或者说电感从不“复位”,意味着在开关周期内电感磁通从不回到0,功率管闭合时,线圈中还有电流流过。
2、DCM,(Discontinuous Conduction Mode)非连续导通模式:在开关周期内,电感电流总会会到0,意味着电感被适当地“复位”,即功率开关闭合时,电感电流为零。
3、BCM(Boundary Conduction Mode),边界或边界线导通模式:控制器监控电感电流,一旦检测到电流等于0,功率开关立即闭合。控制器总是等电感电流“复位”来激活开关。如果电感值电流高,而截至斜坡相当平,则开关周期延长,因此,BCM变化器是可变频率系统。BCM变换器可以称为临界导通模式或CRM(Critical Conduction Mode)。
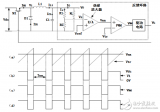
图1通过花电感电流曲线表示了三种不同的工作模式。
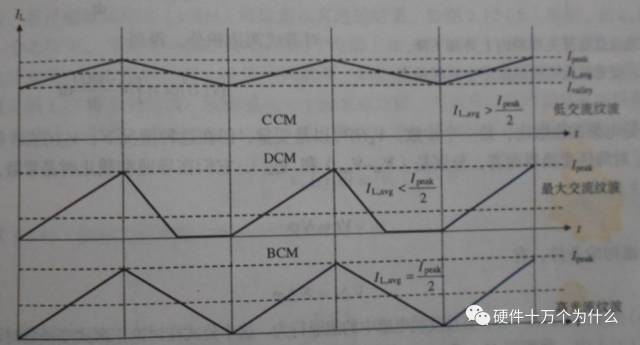
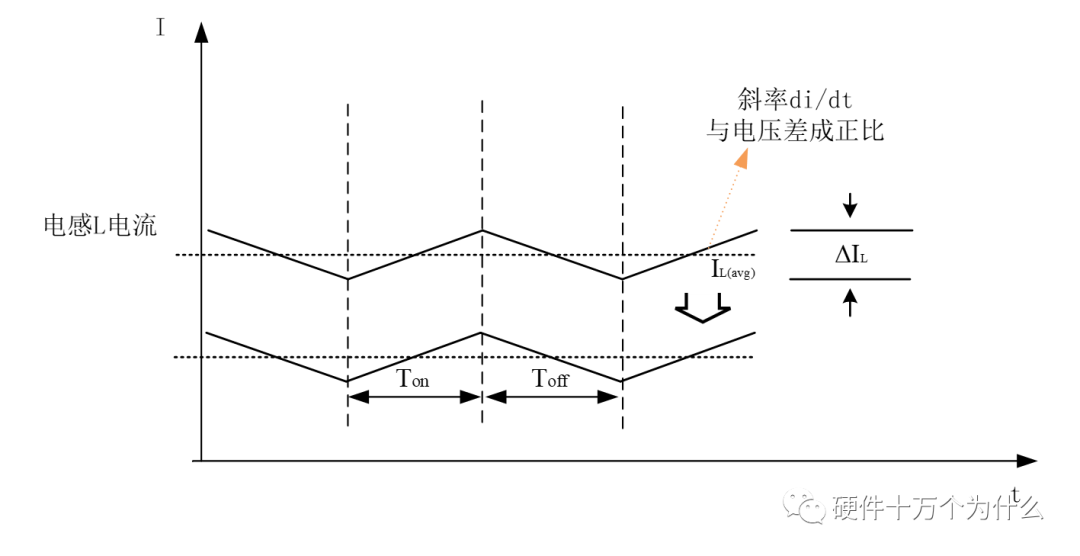
图2 电感工作的三种模式:CCM、DCM、BCM
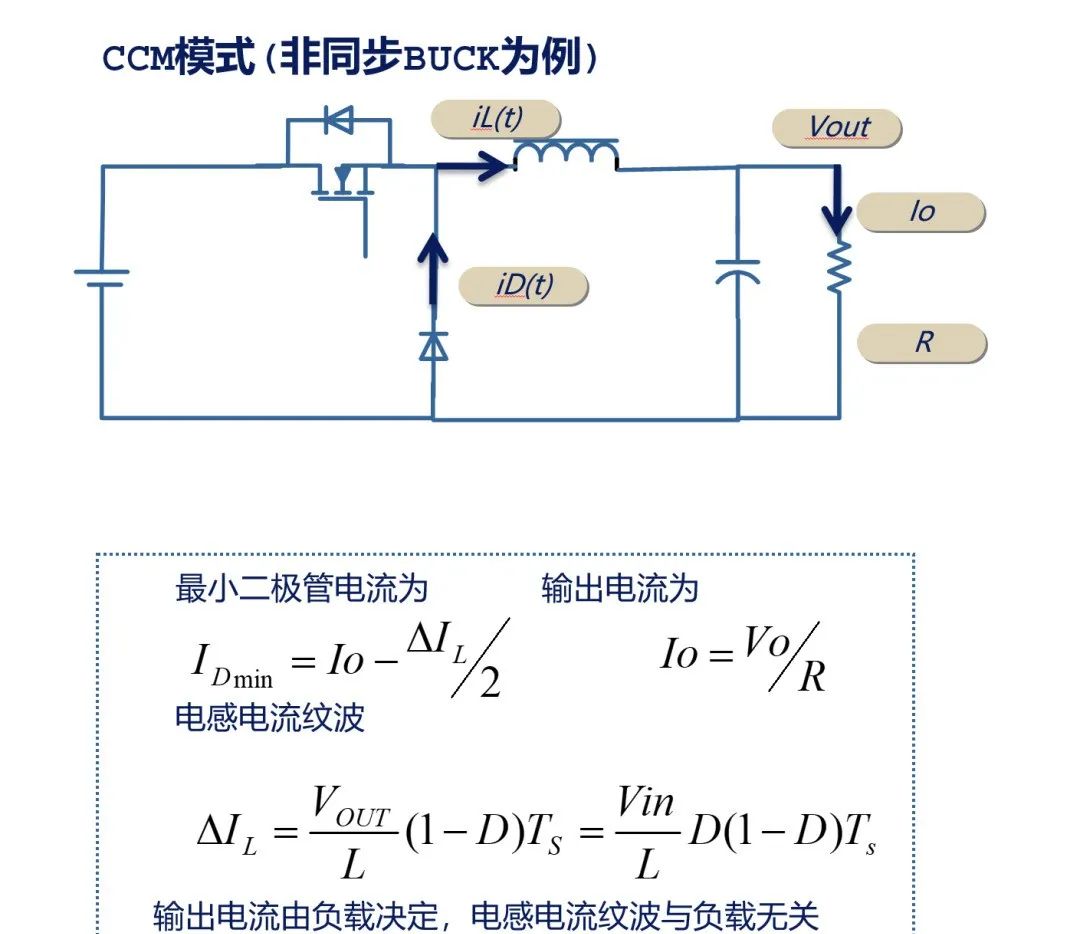
电流斜坡的中点幅值等于直流输出电流 的平均值,峰值电流
的平均值,峰值电流 与谷值电流
与谷值电流 之差为纹波电流。
之差为纹波电流。
三、CCM工作模式及特点
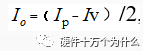
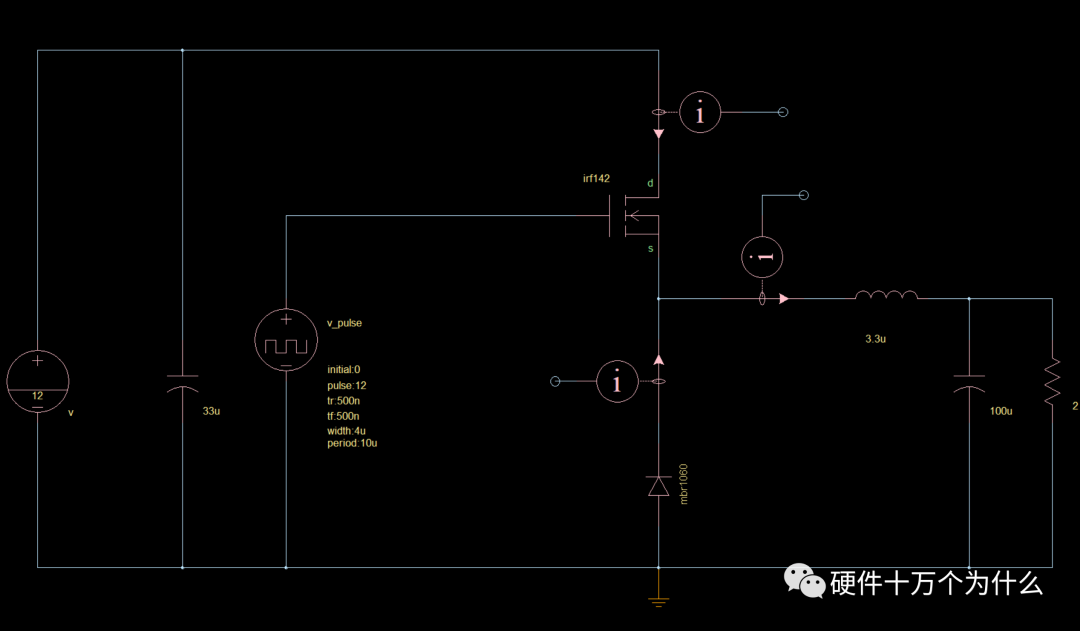
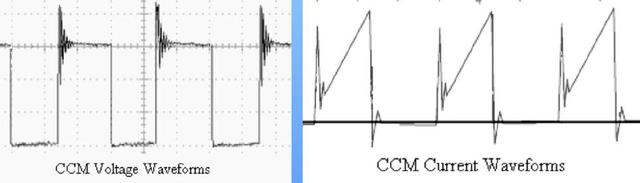
根据CCM定义,测试出降压变换器工作于连续模式下的波形,如下图3所示。
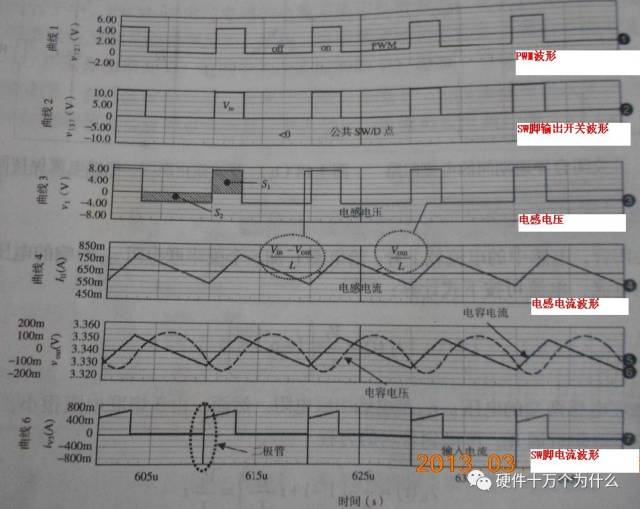
图3
波形1表示PWM图形,将开关触发成导通和截止。当开关SW导通时,公共点SW/D上的电压为Vin。相反,当开关断开时,公共点SW/D电压将摆到负,此时电感电流对二极管D提供偏置电流,出现负降压——续流作用。
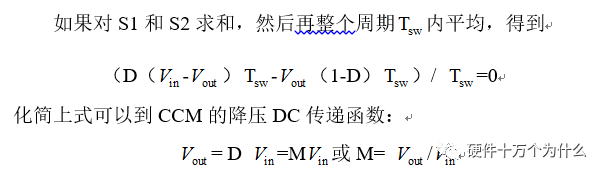
波形3描述了电感两端电压的变化。在平衡点,电感L两端的平均电压为0,及S1+S2=0。S1面积对应于开关导通时电压与时间的乘积,S2面积对应于开关关断时电压与时间的乘积。S1简单地用矩形高度 乘以
乘以 ,而S2也是矩形高度-
,而S2也是矩形高度- t乘以(1-D)
t乘以(1-D) 。
。
从上式可以看到 是随D(占空比)变化的。理想情况下,传递特性独立于输出负载。但是书上说这种描述,并不十分精确,具体的待我认真看了再告诉大家。
是随D(占空比)变化的。理想情况下,传递特性独立于输出负载。但是书上说这种描述,并不十分精确,具体的待我认真看了再告诉大家。
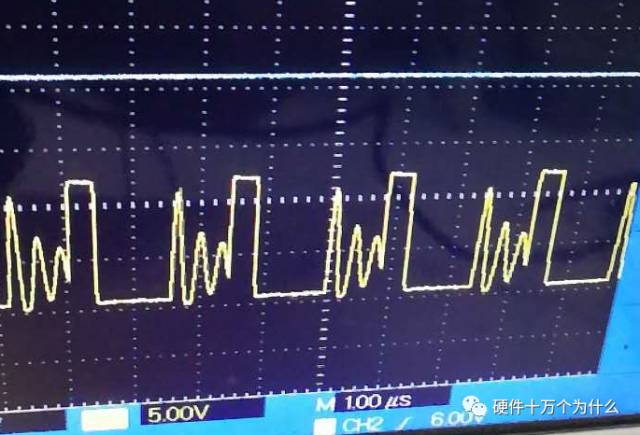
其实我们再看上面最后一个波形,在开关的闭合的时候,SW/D点电流波形有个很大的尖峰,我自己有测的是电压波形,用电压芯片ACT4065及ACT4065A,如图4、图5所示,具体原因有以下两个方面。
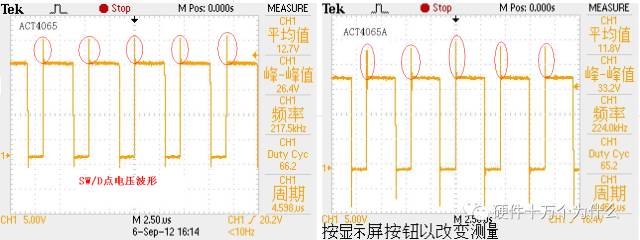
图4 图5
第一、因为在开关闭合,将 作用到二极管的阴极,突然中断了二极管的导通周期。对于PN二极管,首先需要将正向导通时PN结变回到电中性时的PN结,移去所有的少数载流子。二极管除去所有的注入电荷需要一定的时间才能恢复到它的断开状态,在完全恢复之前,它呈现短路行为。对于肖特基二极管,有金属半导体硅结,它没有恢复效应,然而,有很大的寄生电容,也有结电容。当二极管导通,一旦放电,SW很快通过放电电容作用电压,产生电流尖峰。所以减缓闭合开关SW时间将会有助于降低尖峰电流。
作用到二极管的阴极,突然中断了二极管的导通周期。对于PN二极管,首先需要将正向导通时PN结变回到电中性时的PN结,移去所有的少数载流子。二极管除去所有的注入电荷需要一定的时间才能恢复到它的断开状态,在完全恢复之前,它呈现短路行为。对于肖特基二极管,有金属半导体硅结,它没有恢复效应,然而,有很大的寄生电容,也有结电容。当二极管导通,一旦放电,SW很快通过放电电容作用电压,产生电流尖峰。所以减缓闭合开关SW时间将会有助于降低尖峰电流。
第二、与电流形状有关。从图像中可以看到输出纹波(电容电流波形)很小。输出纹波很平滑,“无脉冲”。意味着输出电流信号能很好地为后续电路所接受,即电源中污染较小。另外,输入电流不仅有尖峰,而且看上去像方波。如果电感L的值趋于无穷大,输入电流的波形就是实实在在的方波。因此,该电流是“脉动”电流,包含大量的污染分量,比一般的正弦形状的电流更难滤波。
方波: 由正弦波的奇次諧波組成,也就是由正弦1,3,5,7...n等頻率組成。
对于开关关断的瞬间也有尖峰产生,我觉得应该也是与二极管及SW脚的寄生电容及结电容有关。
通过以上可以总结出CCM降压变化器的特点:
1、D限定在小于1,降压变换器的输出电压始终小于输入电压;
2、如果忽略各种欧姆损耗, 变换系数M与负载电流无关;
3、通过变化占空比D,可以控制输出电压;
4、降压变换器工作于CCM,会带来附加损耗。因为续流二极管反向恢复电荷需要时间来消耗,这对于功率开关管而言,是附加的损耗负担;
5、输出没有脉冲纹波,但是有脉冲输入电流。
四、DCM工作模式及相关特点
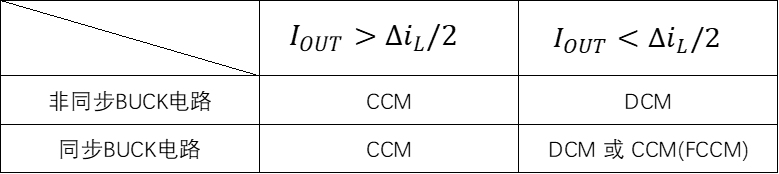
开关器件在负载电流较大的时都是工作CCM模式,但当随着负载电流下降,纹波电流将整体下降,如图2所示,当负载电流减小到谐波峰峰值一半时,即
斜坡的最低点正好降到零,在这个最低点,电感电流为零,电感储能为零。如果电感负载电流进一步减小,电感将进入DCM工作模式,电压和电流波形将发生很大的变化如下图6所示,以及传递函数将发生很大的变化。
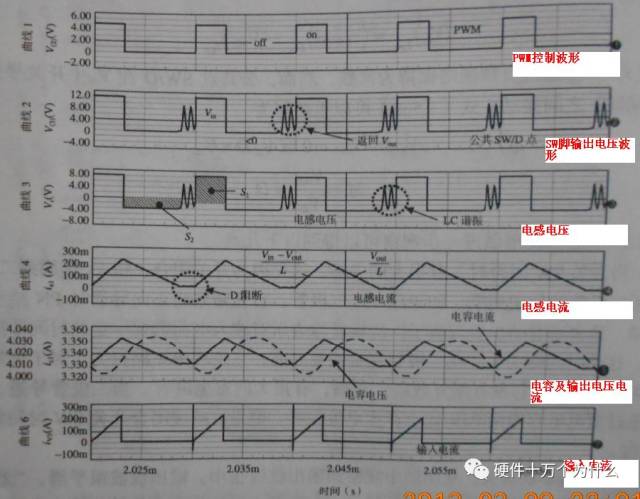
图6
从波形4,可以看到电感电流下降到0,引起续流二极管截止。如果出现此情况,电感左端开路。理论上,电感左端的电压应该回到,因为电感L不再有电流,不产生振荡。但是由于周围存在很多寄生电容,如二极管和SW的寄生电容,形成了振荡回路。如曲线2和曲线3,出现正弦信号,并在几个周期后消失,这与电阻阻尼有关。但是在实际测试中可能还是有差别的,比如我在ACT4065A测试中,测试SW/D的波形,振荡却在中间,如下图7所示,供应商工程师说这是在DCM模式,但是我没找到相关资料进行验证。
图7
Buck变压器在整个负载范围内都将输出电压控制在一个定值,即使电感进入不连续工作模式。因此很容易会让我们产生误区,认为电感进入不连续工作模式对电路工作没有影响。实际上,整个电路的传递函数已经发生变化,控制环路必须适应这种变化。
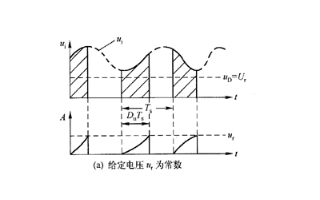
对于Buck调整器,电感进入不连续工作模式也没什么问题。在进入不连续模式之前,直流输出电压
注意到此公式与负载电流参数无关,所以当负载变化的时,不需调节占空比D,输出电压仍保持恒定。实际上,当输出电流变化时,导通时间也会稍微变化,因为Q1的导通压降和电感电阻随着电流的变化而略有变化,这需要Ton做出适当的调整。
进入DCM工作后,传递函数将发生改变,CCM的传递函数将不再适用,开关管的导通时间将随着直流输出电流的减小而减小。下面是DCM工作模式下的传递函数,占空比与负载电流有关,即

因为控制环路要控制输出电压恒定,负载电阻R与负载电流成反比关系。假设Vout,Vin、L、T、恒定,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
在临界转换电流处,传递函数从CCM转变为DCM。工作CCM时,占空比保持恒定,不随负载电流而改变;工作于DCM时,占空比随负载电流减小而改变。
通过以上可以总结出DCM降压变换器的特点:
1、M依赖于负载电流;
2、对于想通的占空比,DCM下的传递系数M比CCM大在负载电流低工作于深度DCM,M容易达到1。
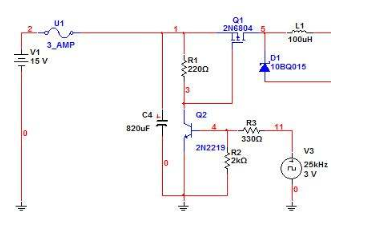
五、Buck调整器电感选择:
为了减小进入断续模式时的临界输出负载电流,我们可以通过加大电感量L,以降低临界输出负载电流。使电路在期望的负载电流范围内工作连续模式。


按理论计算我们应该用303uH,但实际中我们只用68uH,一部分跟成本有关,也跟我产品本身特点有关,空间要小,如果大电感根本就放不下,实际上个人觉得,够用就行。
以下是在测试ACT4065A时,关于输出负载电流临界值随电感量变化的一些波形:
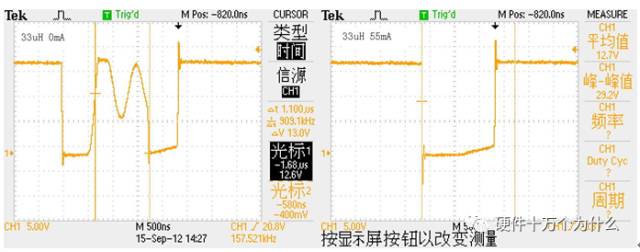
1)L1=27uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=27uH时,负载电流逐渐加大时振荡波形宽度减小,达到100mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 100mA
2)L1=33uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=33uH时,负载电流逐渐加大时振荡波形宽度减小,达到55mA时,波形在关断时无振荡波形产生,达到正常的开关状态。
0mA 55mA
3)L1=47uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=47uH时,负载电流逐渐加大时振荡波形宽度减小,达到45mA时,波形在关断时无振荡波形产生,达到正常的开关状态。
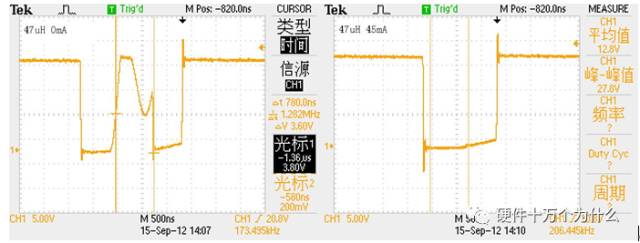
0mA 47mA
4)L1=68uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=68uH时,负载电流逐渐加大时振荡波形度减小,达到30mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 30mA
5)L1=136uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=136uH时,负载电流逐渐加大时振荡波形宽度减小,达到20mA时,波形在关断时无振荡波形产生,达到正常的开关状态。
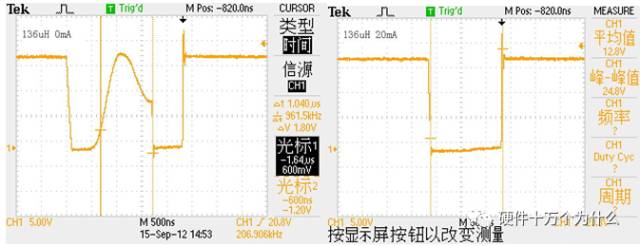
0mA 20mA
6)L1=204uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=204uH时,负载电流逐渐加大时振荡波形宽度减小,达到12mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 12mA
综合上以所述及测试波形来看,对于芯片ACT4065A,在电感量逐渐增大,SW关断时,振荡波形宽度减小;电感量越大,就能在越小的负载电流下消除振荡波形,但在10mA内都存在此情况。
五、CCM与DCM比较:
1、DCM是技领的特色,能降低功耗的,DCM模式的转换效率更高些,属于能量完全转换;
2、工作于DCM模式,输出电流的纹波比CCM大;
3、工作于DCM模式,在电感电流为0的时候,会产生振荡现象;
4、工作于CCM模式,输出电压与负载电流无关,当工作于DCM模式,输出电压受负载影响,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
部分内容整理自百度文库
审核编辑:汤梓红










 工商网监
工商网监
评论