 电子发烧友App
电子发烧友App


引言
桥梁的健康监测具有一些特性,譬如:一座桥梁是一个地理上的分布式系统,通常长达几千米到数十千米;桥梁通常工作于恶劣的环境,并在桥梁工作时采集数据;监测是一个长期过程,也必然是一个遥测过程,而且,由于地理距离和恶劣的环境,最好能够使现场维护降到最少;监测是一个连续的实时过程,其间有大量数据采集,需要采用智能技术获取表征信息以根据数据进行评估。这些特性构成了桥梁健康监测系统的开发过程中需要解决的挑战。
桥梁监测系统初探
对于一座正常工作的桥梁,所需的监测项基本源于三个类别:环境、维护和事故监测。
总而言之,需要监测的主要项目如下:环境监测包括大气温度、风速、氯离子的侵蚀、海浪;静态响应与动态响应的监测包括结构变形、结构压力等。
以连接上海市与洋屿的东海大桥为例,大桥的测量系统遍布整个桥体。将全长32公里的桥分为几个部分,每个部分都安置一个信号采集站,站点间距离为几千米到数十千米。这些分布在指定地点的信号采集站构成了整个数据采集系统。每个站点充当其附近传感器的主机系统。每个站点的功能特性如下:根据所连接传感器的类型,进行多种格式的数据采集、信号调理、数据处理与管理和数据传输等功能。
鉴于所处的恶劣工作环境,这些站点必须耐受(但决不限于)水、湿气、灰尘、冲击及特别是由盐造成的化学腐蚀。而且,工作站点必须具有高坚固性、可靠性和可维护性。
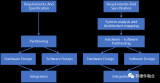
除硬件系统以外,远程配置、管理和传输采集数据属于软件需求。LabVIEW套件是一组软件,它通过与NI PXI模块及包括网络在内的其它相关硬件的无缝集成并采用恰当的抽象和封装,实现了高效监测的目的。
同步:基于GPS的解决方案
实现数据采集系统的主要挑战之一是同步问题——必须实现广阔地理范围内的同步。对此问题的解决方案是采用GPS定时信号。每个站点与一个GPS接收装置连接。接收装置接收GPS同步信号,进而发送至站点内的PXI模块。GPS同步信号用以确保整个分布式系统数据采集的严格同步。
GPS定时信号
GPS系统由每12小时围绕地球旋转一周的24个人造卫星组成。其中,每一个人造卫星都拥有一个精度为10-13秒的板上原子时钟。GPS的人造卫星以1.5GHz的载波频率连续发送其空间坐标以及时间信息。特别地,该时间信息可用于精确地关联、触发和时间标记测量数据。来自GPS接收装置的典型GPS定时信号有两种类型。
第一种信号类型是PPS,如图1所示。

图1 PPS信号
图1中的信号也称为1 PPS,因为它每秒只输出一个脉冲。它通常用作采集的触发信号。PPS类型信号的另一个实例是10M PPS,它每秒产生10M个脉冲。该信号通常用作采样基频。
第二种信号类型是DC-Level的IRIG-B。IRIG是一种承载绝对时间的编码晶体管-晶体管逻辑(TTL)信号,每秒重复或再同步。对于IRIG,每帧为1s。图2所示为IRIG-B标准的一个定时框图。

图2 IRIG-B信号
每个比特用一个周期为10ms的信号来表示,“0”的高电平持续时间为2ms,“1”的高电平持续时间为5ms,而“P”高电平持续时间为8ms。在1s帧内,P比特将秒和分钟、分钟和小时等分隔开。
面向数据采集的同步技术
该范例中的采集系统由NI PXI 1045 18-插槽机箱、NI PXI 8187控制器、NI PXI 6652、6602和4472B模块组成。图3所示为该采集系统的示意框图。

图3 GPS PPS同步原理图
中心部件是动态信号采集(DSA)模块NI PXI 4472B,它是输入和采集传感器信号的实际单元。其它模块用于确保NI PXI 4472B正常工作。该系统的主要挑战在于如何将广泛分布在多个站点的NI PXI 4472B模块同步起来。
NI PXI 6652同步模块与来自GPS接收装置的10M PPS信号连接。该信号在分频后发送至PXI背板,再用作NI PXI 4472B模块的过采样时钟。
NI PXI 6602计数器在两个端口同时接收来自GPS接收装置的1 PPS信号。一个端口的信号通过PXI背板用作SYNC脉冲,以实现所有NI PXI 4472B模块采集信号时的相位同步。另一个端口的信号用作定时器,并与预先设定的采集时间相比较。当达到采集时间时,NI PXI 6602再次通过PXI背板,生成开始触发信号,以启动NI PXI 4472B的数据采集操作。NI PXI 8187控制器从GPS接收装置读入IRIG-B信号,并可从IRIG-B信号获得绝对时间。然后,该绝对时间可用作被采集数据的时间标记。
由于PPS信号都来自GPS系统,它们对于所有站点的所有NI PXI 4472B模块是完全相同的,从而完成跨越广阔地理区域内多机箱系统中多个NI PXI 4472B模块的同步数据采集。
实现整座桥同步数据采集系统的配置,可方便快捷地通过编程实现。
监测过程中的分析
数据采集的意义在于从所采集的海量数据中挖掘有用信息。因此,除记录通过数据采集板卡获得的原始数据(就其自身而言,它显然是非常重要的)之外,还需要从不同方面对这些数据进行分析处理。
桥梁测量数据的离线分析
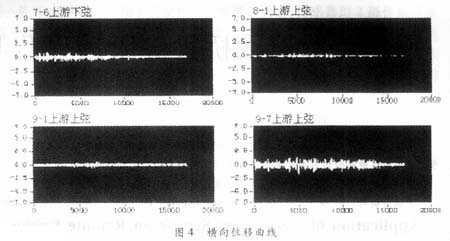
离线分析包括频谱分析和模态分析。对多通道信号频谱分析,除了提供FFT方法,LabVIEW与LabVIEW工具包还提供了标准的多元信号处理算法。例如,高级信号处理工具包提供了TSA MUSIC VI,可用它来获得多通道信号的频谱。图4所示为东海大桥的频谱图实例。
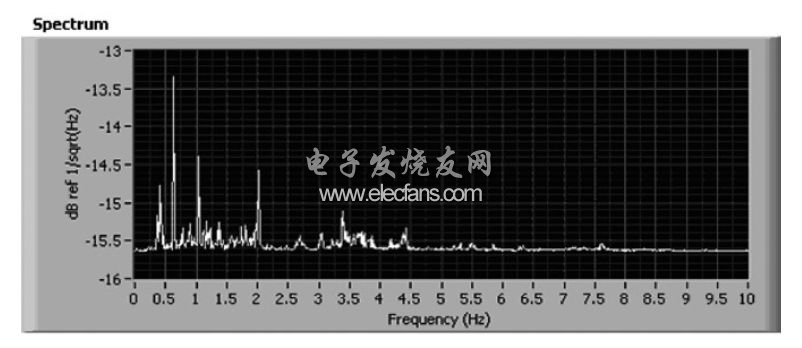
图4 MUSIC所提供的东海大桥频谱
模态分析方法可反映桥梁的动态特性。实际上,模态分析是现今SHM的一项标准工程实践,通过模态分析,可获得模态参数——共振频率、阻尼系数和模态。传统情况下,这些模态参数是从测试人员施加的激励信号以及对应的响应信号中获得的。
为处理类似桥梁的大型结构的模态分析,出现了一种相对新颖的模态分析方法。这种方法能够在大型结构工作时处理所收集的数据,这就是工作模态分析。在此方法中,没有明确的激励信号应用于该结构,而是由环境的自然力和作用于该结构的工作负载充当激励。这样的激励是随机和未知的,仅仅可利用布置在该结构上的传感器来获知所测得的信号——响应信号。因而,工作模态分析也被称作“只有输出”的方法,非常适合桥梁模态分析。
在工作模态分析领域,有一类方法采用仅输出的系统辨识(也称时序分析)技术,即随机子空间辨识(SSI)。该类方法利用系统的输出数据(在此是桥梁的传感器测量数据)来辨识一个线性状态空间模型,能很好地描述所观测到的输出数据。然后,在工作模态分析环境中,由该线性模型的状态转移矩阵来获得模态参数。
高级信号处理工具集提供了随机状态空间建模函数,可实现SSI算法。利用该VI,可方便地计算模态参数。利用该方法进行东海大桥模态分析的一个范例如下所示:
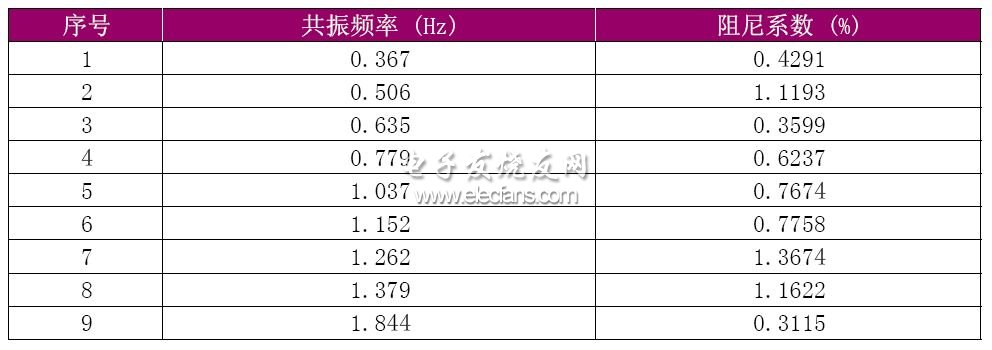
表1 利用离线SSI方法获得的东海大桥共振频率与阻尼系数
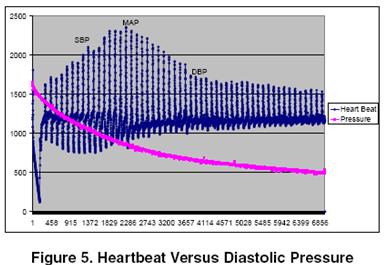
表1所示为共振频率及其对应的阻尼系数;图5所示为东海大桥(仅主桥孔)的首批几个重要振动模式的模态,
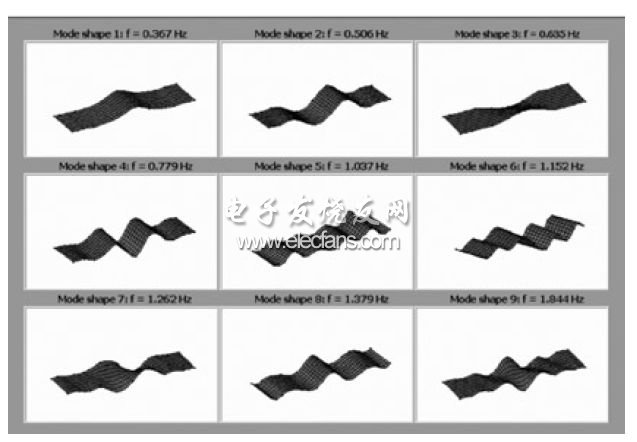
图5 通过SSI算法识别的东海大桥(主桥孔)的模态
而图6所示为利用SSI方法识别的东海大桥模态的模态复杂性图,
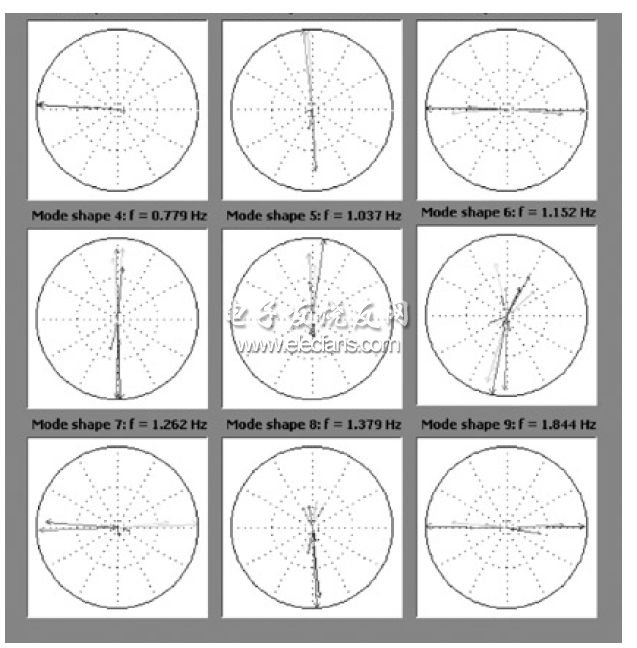
图6 通过SSI算法识别的东海大桥(主桥孔)模态的极点图
这里显示出的模态几乎都在传统方式下被抑制。通过该方法所识别的共振频率与通过一些其他方法所获得的共振频率(见表2)相一致。

表2 通过其它方法获得的参考共振频率
桥梁共振频率的在线监测
另外,为更好地监测一座桥梁的健康状况,需实时跟踪一些富含信息的工程量,尤其对共振频率的实时监测是非常重要的。当下的挑战在于在线完成共振频率计算,这也是目前许多应用的一个研究课题。
为使SSI方法能够在线工作,SSI需要重新表述成某种递归形式,以实现必要的计算效率。这就是递归随机子空间识别(RSSI)。利用RSSI读入来自多通道的采样数据并对其作抽取处理,然后将抽取后的数据馈入到RSSI算法。每次馈入一个新的抽取数据采样,就生成一组新的系统共振频率。所以,共振频率随着数据采集过程的进行而更新。如果RSSI算法执行足够快,这个更新过程就实时运行。
在东海大桥的实例中,通过加速度信号来提取对应的共振频率,信号主要来自于主桥孔周围的数十只加速计。经过同步采集的加速度数据在每个站点都被加入时间标识,然后通过网络传送至监测中心。LabVIEW程序可接收这些多通道数据,以形成一个2维数组。然后,以适应目标共振频率范围的合理速率,对这些多通道信号进行抽取处理。为保证识别效果和计算速率,抽取后的信号被同时送入几个合适的子频带进行滤波,在每个子频带内,都将RSSI算法运用于滤波后的信号。在RSSI算法的初始化程序后,随着时间所生成的频率形成频率-时间曲线,而且,LabVIEW的多线程技术使计算速率足够快,从而成功地实现了桥梁共振频率的在线跟踪。图7所示为这一过程。
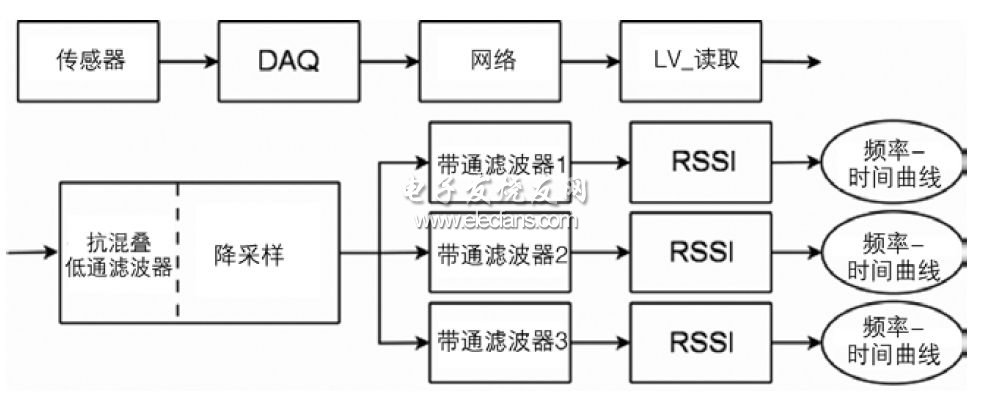
图7 在线模态频率监测示意图
结语
开发一个桥梁健康监测系统是一项具有挑战性的任务,NI软硬件可使这一过程更为顺利。而且,LabVIEW所提供的分析软件可使健康监测的过程更有效、信息更丰富。


















 工商网监
工商网监
评论