

















5 抖动与相噪分析及转换
5.1 相噪转化为抖动的计算
相位噪声到抖动的转化,可以有如下的公式推导。
频率f1到f2的相噪频谱积分可得到相噪Φ(t)的RMS值的平方(RMSΦ(t))2:

其中,SΦ(t)为相噪频谱,L(f) 为积分后的相噪。由于相噪曲线为不规则曲线,运算量很大,实际测量时该积分运算由仪器完成。

总的信号可以表示为以下函数:

其中C(t)表示总的信号,Φ(t)表示调制其上的相位噪声。将Φ(t)与周期/频率结合起来可以得到TIE抖动的表示为:

另有,TIE抖动的RMS值为:

其中,L(f)是关心频段内相噪的积分。
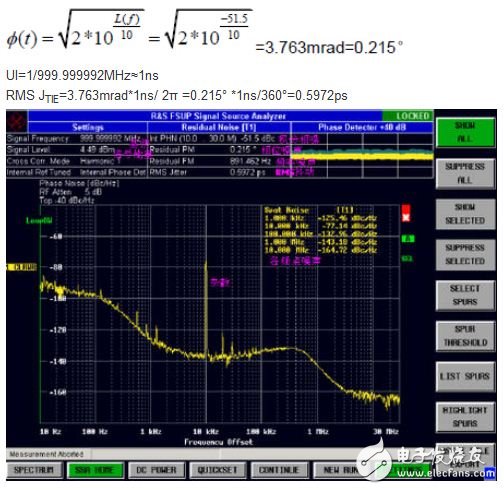
从下面的测量可以得到10Hz到30MHz的积分相噪是-51.5dBc,以该测量为例计算:
5.2 相噪与抖动测量值的比较
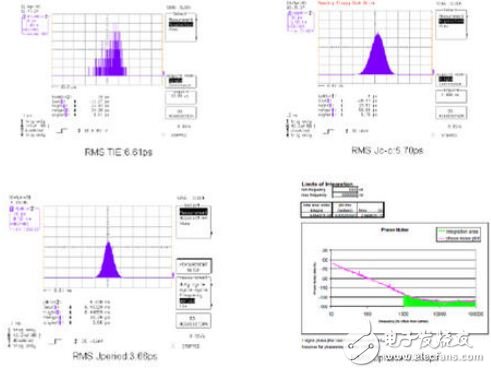
下面四幅图分别是时域的TIE、Jc-c、Jperiod和频域的相噪,可以看到四个测量值有很大的差异,原因可能有以下几点:
● 相噪测试时设定了具体的积分带宽,这个带宽一般在几十兆Hz以内。而时域抖动测试并没有带宽限制,其带宽限制只取决于示波器仪器本身;
● 仪器在测量过程中引入噪声,这里示波器的底噪大于相噪仪,引入的噪声会更大些;
● 相噪仪只是观察到每一个时刻的噪声,示波器可以累积观察一段时间的噪声;
● 相噪测试时以输入信号本身的频率作为基频,忽略了信号的频偏;而示波器测量TIE时会以理想时钟作为参考。
6 小结
抖动测量就像是盲人摸象,每种方法都有其局限性。工程师需要深入了解系统的抖动的要求,以及各种抖动测量技术的原理和优劣,根据需要选择合适的抖动测量评估方法。









 工商网监
工商网监
用户评论(0)