 电子发烧友App
电子发烧友App


显微镜的STM原理与AFM工作原理
STM概述
1982年,国际商业机器公司苏黎世实验室的G..Binnig和HeinrichRohrer及其同事们共同研制成功了世界上第一台新型的表面分析仪器—扫描隧道显微镜(ScanningTunnelingMicroscope,简称STM)。STM的出现,使人类第一次能够实时地观察单个原子在物质表面的排列状态,研究与表面电子行为有关的物理和化学性质,在表面科学、材料科学等领域的研究中具有重大的意义和广阔的应用前景,被国际科学界公认为八十年代世界十大科技成就之一。为表彰STM的发明者们对科学研究的杰出贡献,1986年宾尼和罗雷尔因此获得诺贝尔物理学奖。
STM是继高分辨透射电子显微镜,场离子显微镜之后,第三种在原子尺度观察物质表面结构的显微镜,其分辨率在水平方向可达0.1nm,垂直方向可达0.01nm,它的出现标志着纳米技术研究的一个最重大的转折,甚至可以标志着纳米技术研究的正式起步,这是因为STM具有原子和纳米尺度的分析和加工的能力。使用STM,在物理学和化学领域,可用于研究原子之间的微小结合能,制造人造分子;在生物学领域,可用于研究生物细胞和染色体内的单个蛋白质和DNA分子的结构,进行分子切割和组装手术;在材料学领域,可以用于分析材料的晶格和原子结构,考察晶体中原子尺度上的缺陷;在微电子领域,则可以用于加工小至原子尺度的新型量子器件。
STM的工作原理
STM是利用量子隧道效应工作的。若以金属针尖为一电极,被测固体样品为另一电极,当他们之间的距离小到1nm左右时,就会出现隧道效应,电子从一个电极穿过空间势垒到达另一电极形成电流。且其中Ub:偏置电压;k:常数,约等于1,Φ1/2:平均功函数,S:距离。
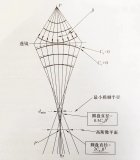
从上式可知,隧道电流与针尖样品间距S成负指数关系。对于间距的变化非常敏感。因此,当针尖在被测样品表面做平面扫描时,即使表面仅有原子尺度的起伏,也会导致隧道电流的非常显著的、甚至接近数量级的变化。这样就可以通过测量电流的变化来反应表面上原子尺度的起伏,如下图右边所示。这就是STM的基本工作原理,这种运行模式称为恒高模式(保持针尖高度恒定)。
STM还有另外一种工作模式,称为恒流模式,如下图左边。此时,针尖扫描过程中,通过电子反馈回路保持隧道电流不变。为维持恒定的电流,针尖随样品表面的起伏上下移动,从而记录下针尖上下运动的轨迹,即可给出样品表面的形貌。
恒流模式是STM常用的工作模式,而恒高模式仅适于对表面起伏不大的样品进行成像。当样品表面起伏较大时,由于针尖离样品表面非常近,采用恒高模式扫描容易造成针尖与样品表面相撞,导致针尖与样品表面的破坏。

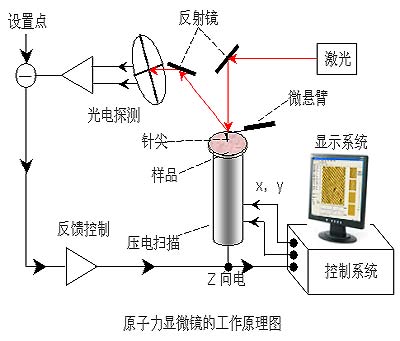
STM原理图
AFM的工作原理
AFM的基本原理与STM类似,在AFM中,使用对微弱力非常敏感的弹性悬臂上的针尖对样品表面作光栅式扫描。当针尖和样品表面的距离非常接近时,针尖尖端的原子与样品表面的原子之间存在极微弱的作用力(10-12~10-6N),此时,微悬臂就会发生微小的弹性形变。针尖与样品之间的力F与微悬臂的形变 之间遵循虎克定律:F=-k*x ,其中,k为微悬臂的力常数。所以,只要测出微悬臂形变量的大小,就可以获得针尖与样品之间作用力的大小。针尖与样品之间的作用力与距离有强烈的依赖关系,所以在扫描过程中利用反馈回路保持针尖与样品之间的作用力恒定,即保持为悬臂的形变量不变,针尖就会随样品表面的起伏上下移动,记录针尖上下运动的轨迹即可得到样品表面形貌的信息。这种工作模式被称为“恒力”模式(Constant Force Mode),是使用最广泛的扫描方式。
AFM的图像也可以使用“恒高”模式(Constant Height Mode)来获得,也就是在X,Y扫描过程中,不使用反馈回路,保持针尖与样品之间的距离恒定,通过测量微悬臂Z方向的形变量来成像。这种方式不使用反馈回路,可以采用更高的扫描速度,通常在观察原子、分子像时用得比较多,而对于表面起伏比较大的样品不适用。
原子力显微镜工作原理图
AFM有多种操作模式,常用的有以下4种:接触模式(Contact Mode)、非接触(Non-Contact Mode)、轻敲模式(Tapping Mode)、侧向力(Lateral Force Mode)模式。根据样品表面不同的结构特征和材料的特性以及不同的研究需要,选择合适的操作模式。

AFM三种操作模式的比较
接触模式
在接触模式中,针尖始终与样品保持轻微接触,以恒高或恒力的模式进行扫描。扫描过程中,针尖在样品表面滑动。通常情况下,接触模式都可以产生稳定的、高分辨率的图像。
在接触模式中,如果扫描软样品的时候,样品表面由于和针尖直接接触,有可能造成样品的损伤。如果为了保护样品,在扫描过程中将样品和针尖之间的作用力减弱的话,图像可能会发生扭曲或得到伪像。同时,表面的毛细作用也会降低分辨率。所以接触模式一般不适用于研究生物大分子、低弹性模量样品以及容易移动和变形的样品。
非接触模式
在非接触模式中,针尖在样品表面上方振动,始终不与样品接触,探针监测器检测的是范德华力和静电力等对成像样品的无破坏的长程作用力。这种模式虽然增加了显微镜的灵敏度,但当针尖与样品之间的距离较长时,分辨率要比接触模式和轻敲模式都低,而且成像不稳定,操作相对困难,通常不适用于在液体中成像,在生物中的应用也比较少。
轻敲模式
在轻敲模式,微悬臂在其共振频率附近作受迫振动,振荡的针尖轻轻的敲击样品表面,间断的和样品接触,所以又称为间歇接触模式。由于轻敲模式能够避免针尖粘附到样品上,以及在扫描过程中对样品几乎没有损坏。轻敲模式的针尖在接触表面时,可以通过提供针尖足够的振幅来克服针尖和样品间的粘附力。同时,由于作用力是垂直的,表面材料受横向摩擦力、压缩力和剪切力的影响较小。轻敲模式同非接触模式相比较的另一优点是大而且线性的工作范围,使得垂直反馈系统高度稳定,可重复进行样品测量。
轻敲模式AFM在大气和液体环境下都可以实现。在大气环境中,当针尖与样品不接触时,微悬臂以最大振幅自由振荡;当针尖与样品表面接触时,尽管压电陶瓷片以同样的能量激发微悬臂振荡,但是空间阻碍作用使得微悬臂的振幅减小,反馈系统控制微悬臂的振幅恒定,针尖就跟随样品表面的起伏上下移动获得形貌信息。轻敲模式同样适合在液体中操作,而且由于液体的阻尼作用,针尖与样品的剪切力更小,对样品的损伤也更小,所以在液体中的轻敲模式成像可以对活性生物样品进行现场检测、对溶液反应进行现场跟踪等。
侧向力模式
横向力显微镜(LFM)工作原理与接触模式的原子力显微镜相似。当微悬臂在样品上方扫描时,由于针尖与样品表面的相互作用,导致悬臂摆动,其形变的方向大致有两个:垂直与水平方向。一般来说,激光位置探测器所探测到的垂直方向的变化,反映的是样品表面的形态,而在水平方向上所探测到的信号的变化,由于物质表面材料特性的不同,其摩擦系数也不同,所以在扫描的过程中,导致微悬臂左右扭曲的程度也不同。微悬臂的扭转弯曲程度随表面摩擦特性变化而增减(增加摩擦力导致更大的扭转)。激光检测器可以实时分别测量并记录形貌和横向力数据。通常不仅样品表面组分不同可以导致微悬臂扭曲,样品表面形貌的变化也会导致微悬臂的扭曲,如下图所示。为了区分这二者,通常LFM图像和AFM图像应该同时获得。根据导致微悬臂扭曲的原因不同,通常可以利用LFM获得物质表面的组分构成像和“边缘增强像”。

侧向力模式


















 工商网监
工商网监
评论