 电子发烧友App
电子发烧友App


以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。
电路一
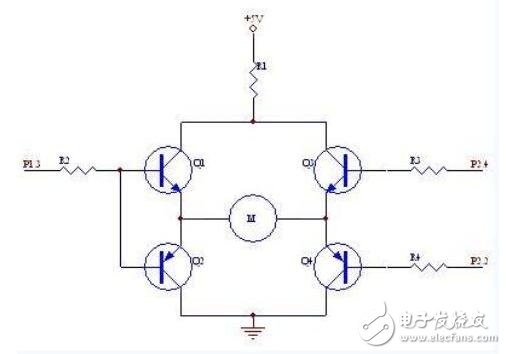
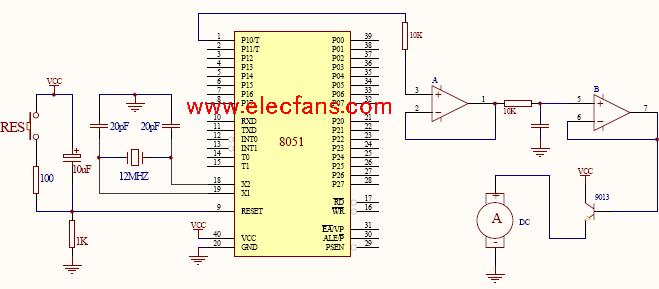
如下图所示,些电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。
图中电阻:R1=20Ω,R2=R3=R4=510Ω
但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。
经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。
总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。
电路二
如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。
但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。

电路三
在电路二中,由于Q2和Q4的发射极高出基极一个0.7V,而基极最低为0V,实际由于CPU引脚内部有MOSFET管压降,所以Q2和Q4的发射极不会低于1V,这样使M两端的有效电压范围减小。
要解决这一问题,则Q2和Q4需换成NPN管。但NPN管的驱动如电路一所示,只靠CPU引脚的上拉是不行了,所以需要另加上拉电阻,如下图所示。
上图中,与电路一不同的是两只NPN管移到了下方,PNP在上方,这样,Q1和Q3的集电极的电位最低可达到一个管压降(0.3V)。这样增加了M的压降范围。
但为了保证对NPN管的足够的驱动,P1.3和P2.2必须加上拉电阻,如图所示。图中,R2、R5、R6都不可少。所以这种电路的元件用量比较大。
还有,R5应该比R6大几倍,比如10倍,这样,当Q1导通时,P1.3处的电压可以分得较大,不致于使Q2导通。如果R5太小或为0,则当Q1导通时,由于P1.3处的压降只有0.7V左右,将使Q2也导通。
经过试验,R2、R6、R3、R4可取510Ω,R5取5.1kΩ。这种值下各处的电压如下(R1为20欧):
U1:4.04 U2:2.99 U3:3.87 U4:4.00 U5:0.06 U7:0.79
电路四
这个电路由电路一改造而来,如下图5,图中标有各点实测电压值:
此图中基极的限流电阻都去掉了,因为作者设计的电路对元件要求要少。从电路上分析,不要没什么关系,有R1起着总的限流作用,而且引脚内部有上拉电阻,这样保证电路不会通过太大的电流。
这个电路可以使电机运行。
但在R2的选择上,比较讲究,因为R2的上拉作用不但对Q1有影响,而且对Q2的导通也有影响。如果R2选的过小,则虽然对Q1的导通有利,但对Q2的导通却起到抵制作用,因为R2越小,上拉作用越强,Q2的导通是要P1.3电位越低越好,所以这是矛盾的。也就是说,Q1的导通条件和Q2的导通条件是矛盾的。
经实验,R2取5.1k欧比较合适。由此可见,这个电路虽然很省元件和CPU引脚,但驱动能力有个最大限,即Q1和Q2的驱动相互制约下,只能取个二者都差不多的折中方案。否则如果一个放大倍数大,则另一个则会变小。
总结:以上电路各有利蔽,要视应用场而选用。
微型电机驱动电路原理分析及实验
- 电机驱动(85204)


相关推荐
哪些方式能够放大微型伺服电机的扭矩?
。 (2)增加电压和电流:在合理范围内增加微型伺服电机的供电电压和电流,可以提高其输出扭矩。但需要注意不要超过电机的额定工作参数,以免损坏电机或降低寿命。 (3)使用强力驱动器:选择适配的驱动器可以提供更高的电流输
2023-08-04 08:30:02 279
279
279电机驱动系统MCU拆解之驱动板
电机驱动系统MCU拆解分析,驱动板主要包括驱动电源电路;驱动电路;钳位电路设计;短路保护电路;推挽电路等,以及母线电压、温度信号采集电路。
2023-05-09 14:52:48975
975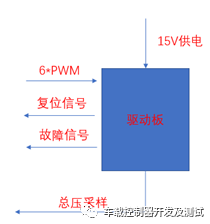
Arduino实验三十九之步进电机实验
学习任务: 学会使用步进电机 组件: Arduion主板 步进电机 ULN2003达林阵列驱动 USB数据线 下图是步进电机和ULN2003达林阵列驱动 实验步骤: 1.建立电路 Arduion
2023-03-24 11:49:14 0
0
0微型步进电机15BY25驱动
Contents 1> 电机 1.1> 旋转原理 1.2> 拍数 1.3> 步距角 2> 驱动电路 2.1> MS35656 2.2> L6219 2.3> TC1508 3> 工作时序 4
2023-03-23 10:47:340
0步进电机驱动实验
28BYJ-48步进电机空载耗电在50mA一下,带64倍减速器,输出力矩比较大,可以驱动重负载,极适合开发板使用。注意:此款步进电机带有64倍减速器,与不带减速器的步进电机相比,转速显得 缓慢,为
2023-03-23 10:43:380
0电路分析实验
电路分析实验实验一 基尔霍夫定律及叠加原理的验证实验二 电压源与电流源的等效变换 实验三 戴维南定理和诺顿定理的验证实验四&
2009-03-18 20:42:49
Arduino实验16步进电机的控制
实验目的 (1)掌握ULN2003AN驱动阵列的原理,熟悉驱动模块的使用; (2)熟悉并理解步进电机的基本原理,熟悉步进电机的使用方法; (3)掌握步进电机驱动电路的连接方法 (4)编写并测试步进
2023-03-21 10:47:390
0小功率直流电机的驱动电路
s8050 驱动微型130电机转动 反接的二极管用于防止电机突然停止产生的大电动势对电路造成破坏; 电阻值不能太大,不然 s8050 集电极电流太小,带不动电机; 如果单片机管脚电压不够可以直接将
2023-03-20 10:43:401
1Arduino实验17 L298N电机驱动模块
一、实验目的
(1)熟悉L298N电机驱动模块原理与功能;
(2)掌握L298N驱动电机的程序控制方法;
(3)熟悉PS2双轴摇杆传感器模块的原理与功能;
(4)编写L298N电机驱动
2023-03-16 14:14:509
9电机驱动芯片行业分析
电机驱动芯片是集成有CMOS控制电路和DMOS功率器件的芯片,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。可以用来驱动直流电机、步进电机和继电器等感性负载。
电机驱动行业产业链上游主要为半导体材料与半导体设备,下游应用电动机、电子信息制造与机械机电等。
2023-03-16 09:28:451
1步进电机驱动电路和控制电路简述
步进电机驱动电路是一种控制步进电机旋转的电路系统。步进电机是一种特殊的电机,其转动角度是以固定的步进角度进行的,而不是连续的旋转。步进电机驱动电路可以将控制信号转换为电机电压和电流信号,使步进电机
2023-03-13 17:06:441726
1726用PIC16F877A和TB6612FNG电机驱动的微型电路
电子发烧友网站提供《用PIC16F877A和TB6612FNG电机驱动的微型电路.zip》资料免费下载
2022-08-15 11:17:344
490W光轴电机微型调速电机的特点
微型电机驱动闭式传动减速装置(又称微型减速马达),用来降低转速和增大转矩,以满足机械设备工作的需要,称为微型齿轮减速电机,使用的优点是简化设计、节省空间、延长使用寿命、降低噪音、提高扭矩和负载能力
2021-12-24 10:02:18928
928步进电机驱动实验(89C51 + KEIL + Proteus)
设计2.1 方案设计2.2 程序设计第3章 实验结果第1章 实验目的本章节主要对步进电机驱动实验的目的进行介绍,主要从实验内容和实验原理进行展开介绍。1.1 实验内容(1) 了解步进电机原理;(2) 采用任意mcu设计步进电机驱动电路;(3) 编制步进电机驱动(正反转)程序;(4) 撰写报告。1.
2021-11-20 16:06:0129
29微型减速电机的原理
微型减速电机是微型精密减速箱(也叫齿轮箱)与微型电动机组装成一体的一种电动机。 用户在选择电动机时,往往会因为单体电动机转速过高或扭力太小而不能满足其需要,这时,选择微型减速电机
2021-08-02 16:29:531744
1744微型电机的结构是怎样的
微型电机是近年来发展起来的一种全新概念的驱动装置,它利用压电材料的逆电效应,把电能转换为弹性体的超声振动,并通过摩擦传动的方式转换成运动体的回转或直线运动。 微型电机厂家在研发生产过程中,会用到不少
2021-06-26 17:54:334259
4259微型电机的技术参数
不同型号的微型电机性能有所差别,其性能参数难以统一阐明。一般来说,用于驱动机械的侧重于运行及启动时的力能指标;作电源用时考虑输出功率、波形及稳定性;控制用微型电机则侧重于静态和动态的特性参数。前两类电机的特性参数与普通电机相似,唯独控制用微电机有其独特的特性参数。
2021-06-24 11:47:212
2微型马达电机的分类、应用及发展现状
微型马达电机是一种体积小、大力矩、低噪音的新型微电机。微型马达电机在汽车车窗驱动装置、办公自动化设备、精密仪器仪表、计算机、工业控制系统航空航天、智能机器人等领域都有着广泛的应用前景。
2021-04-16 09:27:274
4微型电机在机器人手指关节的应用及分类
随着各式各样的微型智能机器人走进人们的生活中,微型电机的应用越来越广泛,微型智能机器人的各种动作都是通过微型电机旋转来驱动实现的。那么微型智能机器人手指关节用什么样的微型电机呢?
2021-03-31 17:08:401
1一文详解电源供电以及电机驱动原理与电路分析
电机驱动Motor drive是组装在胶片式照相机内的微型电机或弹簧及其附件的总称,借助微型电机自动地卷取胶片,大多是指35毫米单镜头反光相机所用的。
2021-03-18 01:27:0013
13超声电机压电致动器驱动微型云台的应用
超声电机压电致动器驱动微型云台的应用,超声电机高精度\可中空、体积小、扭力大、断电自锁、适应温度范围-40℃到105℃,配合外置或者内置闭环控制进行高精度,可应用于微型云台应用。
2021-03-16 11:53:261
1微型电机市场情况和微型电机的主要特点说明
微型电机即微型电动机,也称小型电机,是一种新型的驱动装置,集超声学、振动学、材料学、摩擦学、电子学和控制科学为一体的多学科交叉的技术。电机利用压电材料的逆压电效应制成的新型驱动器。它由定子、转子以及
2020-12-21 08:00:000
0微型超声电机有哪些类型
微型超声电机是近年来兴起的驱动装置,在市场上拥有广阔的发展前景。微型超声电机结构紧凑,体积小,目前并没有统一系统的分类方法。微型超声电机有哪些分类呢?
2020-12-18 08:00:000
0微型电机的应用范围以及微型电机的应用领域介绍
微型电机是一种应用超声波的弹性振动方式以获得驱动动力,然后再利用摩擦力带动转子而驱动的电机。下面电机小编来为大家介绍下微型电机的类型及应用范围。 微型电机在结构上大体可分为3类 : 1.电磁式
2020-12-08 11:12:383436
3436微型电机有哪些类型及可以应用在什么范围内
微型电机是一种应用超声波的弹性振动方式以获得驱动动力,然后再利用摩擦力带动转子而驱动的电机。下面电机小编来为大家介绍下微型电机的类型及应用范围。
2020-12-08 08:00:000
0电机供电电路及驱动电路原理解析
电机驱动 Motor drive 是组装在胶片式照相机内的微型电机或弹簧及其附件的总称,借助微型电机自动地卷取胶片,大多是指 35 毫米单镜头反光相机所用的。
2020-12-05 10:03:0017455
17455
微型电机的优势有哪些,微型电机可应用于哪些行业
。 微型电机的优势有哪些? 1、结构紧凑,设计灵活,转矩密度大(转矩密度可以达到传统电机的5-10倍),可实现电机的短、小、薄。 2、低速大扭矩,无需齿轮减速机构,可直接驱动。 3、响应快(毫秒级)断电自锁,且具有较大的
2020-11-03 14:05:562733
2733什么是微型电机,微型电机有哪些应用领域
。 微型电机的优势有哪些? 1、结构紧凑,设计灵活,转矩密度大(转矩密度可以达到传统电机的5-10倍),可实现电机的短、小、薄。 2、低速大扭矩,无需齿轮减速机构,可直接驱动。 3、响应快(毫秒级)断电自锁,且具有较大的
2020-11-03 14:03:554293
4293使用超声电机技术制作的微型云台的优势是什么
超声电机压电致动器驱动微型云台的应用,超声电机高精度\可中空、体积小、扭力大、断电自锁、适应温度范围-40℃到105℃,配合外置或者内置闭环控制进行高精度,可应用于微型云台应用。 目前微型云台,普遍
2020-10-20 10:16:54547
547使用超声电机驱动R轴及微型机械臂的应用说明
超声电机压电致动器驱动的设备R轴应用,超声电机高精度(约为0.005°)、可中空、体积小、扭力大、断电自锁、适应温度范围-40℃到105℃,配合外置或者内置闭环控制进行高精度,可应用于设备R轴及微型机械臂应用。
2020-10-13 08:00:001
1超声电机中设备R轴及微型机械臂的应用分析
超声电机压电致动器驱动的设备R轴应用,超声电机高精度(约为0.005)、可中空、体积小、扭力大、断电自锁、适应温度范围-40℃到105℃,配合外置或者内置闭环控制进行高精度,可应用于设备R轴及微型
2020-10-12 11:18:491776
1776处理微型电机受潮的方法
微型电机在存放过程中如果遇到湿热天气(如“回南天”)会导致微型电机受潮,如果微型电机受潮启动会导致微型电机绕组绝缘值降低,微型电机线圈绝缘击穿损坏电机。
2020-06-25 16:57:00974
974


微型振动电机的优势
微型振动电机外观小巧,适用众多领域,广泛应用于电机给料机、振动破碎机、旋振筛、振动平台、提升机、直线振动筛。下面顺力微型电机厂家带您见证微型振动电机五大优势:一、微型振动电机偏心块可调,通过偏心块
2019-04-01 17:56:11504
504选用微型减速电机的基本原则。顺力电机
电压和频率:微型减速电机的额定工作电压和频率,应与所使用的电源的电压和频率保持一致。 三、额定功率:微型减速电机的额定功率尽量要和被驱动的机械功率相匹配。对于负载变动的机械,一般可按等值电流法进行选择,但应校
2018-12-29 13:44:41292
292气压驱动微型管道机器人
。建立了微型管道机器人在直线管道、弯曲管道的运动学分析和驱动力分析模型,为驱动力外置提供了控制依据。在管径为70 mm的复合管道的实验研究表明:该气压驱动微型管道机器人在柔性软轴的作用下,可以有效地获得来自外置动力源的驱动
2018-03-28 10:24:502
2Modelica及PSPICE在微型振动发电机的仿真研究
本文利用Modelica语言,对微型振动发电机的输出特性进行了建模和仿真研究。为验证仿真结果,基于等效电路法,在PSPICE软件中建立了微型发电机模型并进行仿真分析,最后对Modelica语言直接
2018-01-16 15:22:170
0基于multisim12的电机驱动模块仿真设计
进行了仿真实验测试,给出了仿真实验方案,分析了PWM选取不同频率时电路工作波形。通过实际测试,该电机驱动模块能很好完成智能车电机驱动。 电机驱动电路设计与仿真分析 摄像头组使用B车模电机,电机型号540.电机驱动模块设计为采用2片BTN7970芯片组
2017-12-07 10:47:2959
59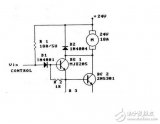
某光电装备电机驱动电路失效分析
驱动电路的性能很大程度上影响整个系统的工作性能。驱动电路的设计中主要考虑功能和性能等方面的因素。本文首先介绍了某平台的电机驱动电路,然后就实际工作及实验中驱动电路
2013-05-15 11:23:0638
38几种用于3V供电的微型直流电机的驱动电路
以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。
2012-06-07 14:56:5519808
19808
微型电机驱动电路实验分析
以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。 &nbs
2010-12-27 11:32:131185
1185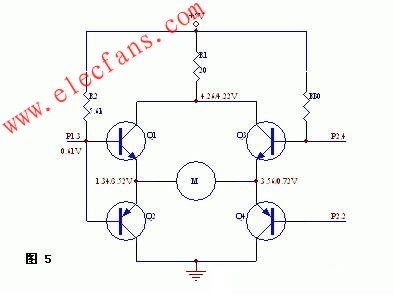
微型轴流式血泵外磁驱动电路设计
微型轴流式血泵是目前人工心脏结构研究的热点,外磁驱动是一种新型的血泵驱动方式。本文介绍了血泵外磁驱动电路的设计。该电路能够产生双向励磁电流,直接驱动电机,实现
2009-08-31 11:39:0616
16超声成像系统步进电机驱动电路的设计
研究设计自动超声成像系统的步进电机驱动控制电路, 驱动步进电机的工作, 并通过计算机准确控制换能器在检测工件时的位置, 实现指定区域内的精确扫描。实验结果表明该技
2009-04-06 17:03:3945
45电路分析实验教学大纲
« 电路分析实验 » 教学大纲
一、课程名称:电路分析实验二、课程性质:专业必修课三、课程教学目的:电路分析实验是在电路基础课程及电学实验的
2009-03-12 09:28:0222
22





 工商网监
工商网监
评论