 电子发烧友App
电子发烧友App


基准电压
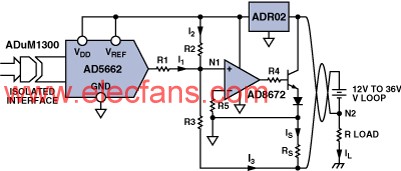
使用ADR025 V基准电压设置电桥的驱动电压或电流,以及设置4 mA零电平失调。其初始精度为0.1%(A级)、0.06% (B级),并且具有10 μV p-p电压噪声。此外,它将采用高达 36 V的电源电压工作,且仅消耗1 mA(最大值),是环路供电应用的理想选择。
基准电压
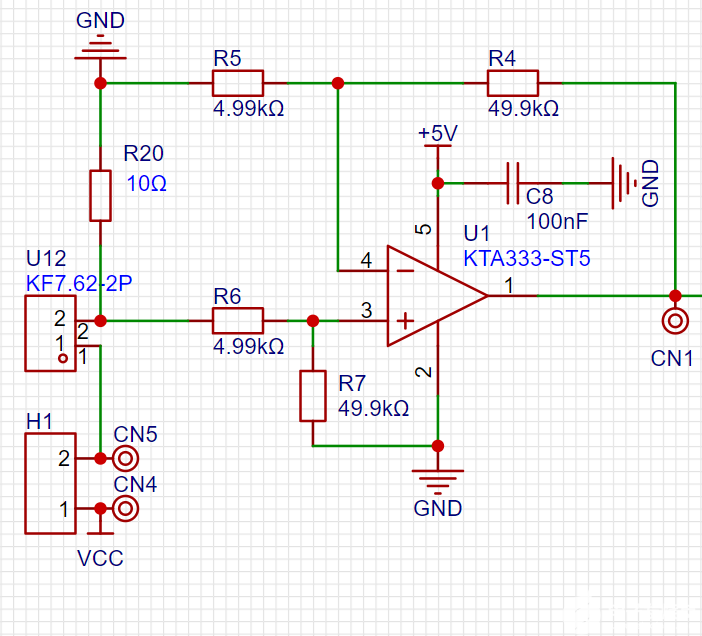
通过强制数值大小为信号分量(I9) 和失调分量(I12)。 之和的电流流过R10,即可产生4 mA至20 mA输出电流。电流I10 = I9 + I12)在R10两端产生电压,该电压通过U2B和Q1施加于感测电阻R10。流经R8的电流是流经R10电流的100倍。因此,环路电流ILOOP可由下式算得:
![]()
选择的R8 (10 Ω)和R10 (1 kΩ)数值要能够轻松得到0.1%容差。
为了让电路正常工作,电路电流I ICIRCUIT
受U2B输出控制的双极性NPN晶体管产生环路电流,并且增益应当至少为300,以便最大程度减少线性误差。其击穿电压应至少为50 V。
输出晶体管Q1是一个50 V NPN功率晶体管,25°C时功耗为 1.1 W。在20 mA输出电流输入至0 Ω环路负载电阻且 VCC电源为36 V时,电路具有最差情况下的功耗。这些条件下的 Q1功耗为0.68 W。
驱动电路板的电源电压VLOOP取决于环路电源VLOOP_SUPPLY环路负载R7和环路电流 ILOOP. 这些数值的关系如下:
![]()
若要使电路正常工作,电源电压VLOOP必须大于7 V,以便为 ADR02基准电压源提供充分的裕量。
因此,
![]()
对于20 mA最大环路电流以及R7 = 250 Ω
![]()
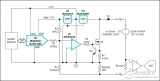
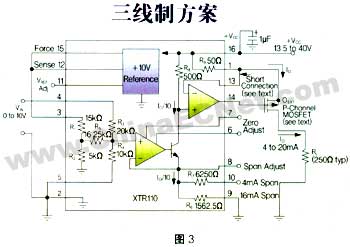
最小环路电源电压同样取决于电桥的驱动电路配置。在VDRIVE= 10 V的电压驱动模式下,电源电压VLOOP必须大于 10.2 V,这样U2A才能保持足够的裕量(见图2)。
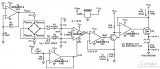
在电流驱动模式下,电源电压VLOOP必须大于11.2 V,这样 U2A才能保持足够的裕量(见图3)。
环路电源电压限值为36 V(最大值)。
有源元件的误差分析
表2和表3分别表示系统中因有源元件造成的AD8226 和 ADR02的A、B级最大误差及rss误差。请注意,运算放大器ADA4091-2仅在一种等级水平下可用。


总电路精度
对电阻容差导致的总误差的合理近似推算是假设每个关键电阻对总误差贡献都相等。5个关键电阻是R3、R8、R9、R10 和R12。0.1%电阻导致的最差情况下的容差可造成0.5%总电阻误差最大值。若假定rss误差,则总rss误差为0.1√5 = 0.224%。
由于有源器件(A级)造成的误差,需要在之前的最差情况误差之上增加0.5%的最差情况电阻容差误差:
失调误差 = 0.29% +0.5% = 0.79%
增益误差 = 0.15% + 0.5% = 0.65%
满量程误差 = 0.44% + 0.5% = 0.94%
这些误差假定选用理想电阻,因此误差仅来源于其容差。
虽然电路允许具有1%或更低的总误差,若要求更佳的精度,则电路需具备失调和增益调节能力。针对4 mA输出和零电平输入,可通过调整R12来校准失调,然后针对满量程100 mV输入,通过改变R9调节满量程。这两项调节是相互独立的;假定首先进行失调校准。
电路的实际误差数据见图4。总输出误差(%FSR)通过将理想输出电流与测量输出电流的差除以FSR (16 mA),然后将计算结果乘以100即可算出。
请注意,0 mV与1 mV输入之间的误差由AD8226输出级饱和电压导致,且电路在负载条件下的误差范围为20 mV至 100 mV。所有轨到轨输出级均受限于其通过饱和电压(双极性输出)或导通电阻(CMOS输出)达到供电轨的能力。
若输出饱和电压引起的误差导致某些问题的产生,则来自电桥的输入信号可通过在+5 V基准电压与电桥输出的其中一侧之间连接一个适当的电阻而进行偏置。

图4. 输出电流(%FSR)的总误差与电桥输出的关系(3 kΩ电桥,24 V环路电源)











 工商网监
工商网监
评论