对于卡尔曼滤波的理解说到底,滤波,数据融合什么的就是一个数据修正,那么,如果我使用数字滤波器,将传感器的数据进行效果比较好的滤波,那么是否可以抛弃卡尔曼滤波呢?在一个合适的时间,用加速度和磁传感器
2015-06-11 16:02:41
- Q_bias;//输出值(后验估计)的微分=角速度}//*********************************************************// 倾角计算(卡尔曼融合
2014-11-28 01:08:51
卡尔曼滤波的估计值能很好的逼近真实值,我的疑惑是,这和滤波有什么关系,请高手介绍下卡尔曼算法是如何滤波的?
2013-07-04 22:57:04
已知测量值和原始值,但测量噪声和观测噪声未知,如何进行卡尔曼滤波。之前看了好像可以用自适应卡尔曼,但不是很懂,求例子,最好有注释的
2017-03-23 19:12:17
卡尔曼滤波算法对比其他的滤波算法有什么优点
2023-10-11 06:42:24
卡尔曼滤波算法是怎么实现对数据的预测处理的
2023-10-10 08:28:02
一、卡尔曼滤波九轴融合算法stm32尝试1、Kalman滤波文件[.h已经封装为结构体]Kalman.h2、I2C总线代码[这里把MPU和HMC挂接到上面,通过改变SlaveAddress的值来
2022-02-10 07:18:25
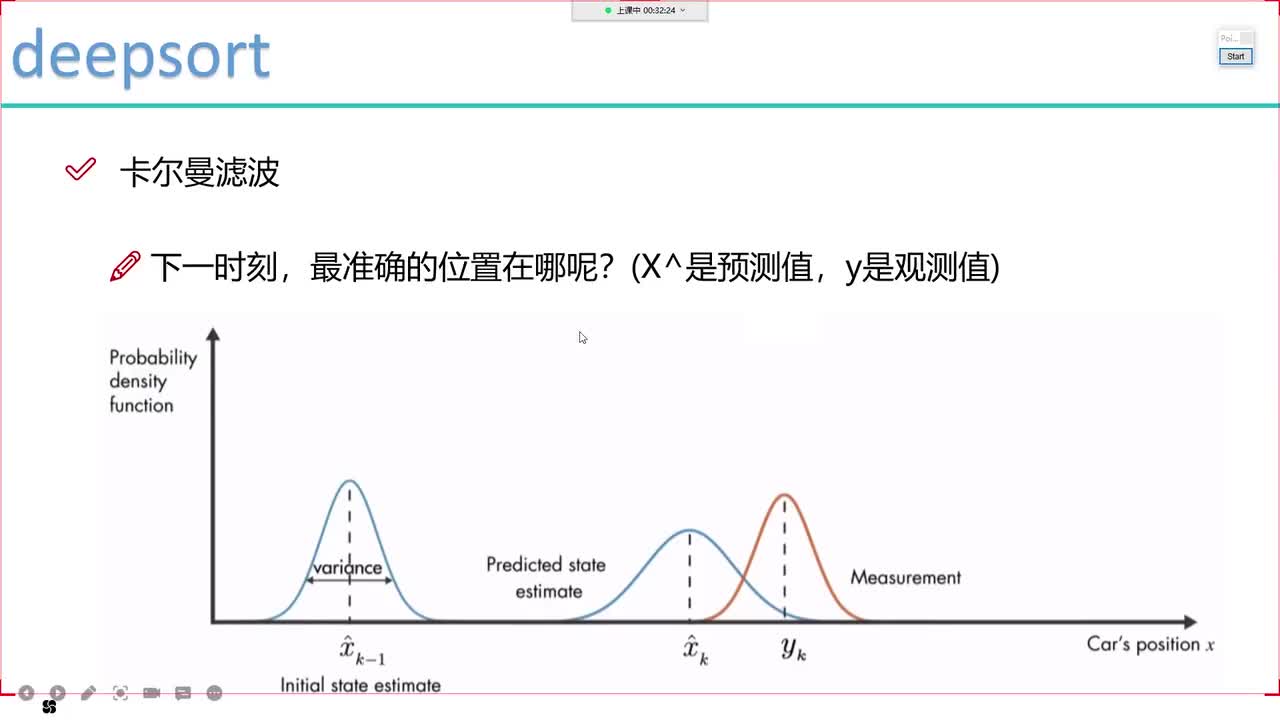
在控制领域,获取控制对象**精确**的当前状态至关重要。但是在传感器测量过程中由于**自身误差**和**外部干扰**导致采样值不准确,卡尔曼滤波的作用就是为了**纠正**(correct)这些不准确,从而得到较准确的“**状态值**”(采样数据);
2021-08-18 07:50:49
卡尔曼滤波在信号处理方面用的是比较多的,资料也是非常多的,这里就不写了。自适应卡尔曼滤波也有很多文献有相关的介绍,其中用的比较多的有基于Sage-Husa算法实现的。这段时间刚好用到,顺便做了一个
2021-08-18 06:49:31
我刚刚开始接触卡尔曼滤波,用来做加速度计与陀螺仪的数据融合遇到了QR的取值问题,想求问一下大神们取Q=[0.001,0;0 0.01]; %系统噪声协方差R=0.001; %测量噪声协方差此时仿真
2019-04-10 22:51:01
卡尔曼滤波器是属于一个高通滤波器还是带通滤波器
2023-10-11 06:58:07
卡尔曼滤波风力发电机中的风速估计,转速估计甚至扭矩估计都设计到卡尔曼滤波,如果只是单一传感变量的平滑处理也能用到卡尔曼滤波。振动信号中的滤波大多采用低通去除高频噪音,而卡尔曼滤波则是通过不确定度把
2021-07-12 06:00:47
在陀螺仪和加速度计中使用卡尔曼滤波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//协方差矩阵P的两列代表陀螺仪、加速度计两维,那两行代表什么呢?为什么P的数组元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。2.卡尔曼滤波器的介绍(Introduction
2016-09-21 11:41:07
希望这篇笔记可以帮助到你。卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。卡尔曼滤波简介:你可能经常听学长学姐提起这个...
2022-02-28 14:24:57
用于实时处理。为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼滤波理论。卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其
2016-09-21 12:10:54
请问,为什么在卡尔曼滤波器模型中,要大R 小Q,原因是什么?图1 R = 5000 * eye(2);Q = eye(6);图2 R = 500 * eye(2); Q = eye(6);请问哪种情况追踪效果好?
2016-05-12 18:02:53
及噪声协方差;估计阶段由回归模型代替状态方程和观测方程,相应的噪声协方差实时自适应调整.该方法克服了传统方法容易受系统动态模型不确定性和噪声协方差不准确限制的问题,仿真结果验证了算法的有效性卡尔曼滤波器算法(C语言)
2011-10-24 09:59:04
卡尔曼滤波器介绍
2016-08-17 12:06:34
一系列递归数学公式描述。它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确
2008-07-14 13:06:49
卡尔曼滤波器原理的学习理解
2016-08-17 12:38:55
用的状态估计方法。直观上来讲,卡尔曼滤波器在这里起了数据融合的作用,只需要输入当前的测量值(多个传感器数据)和上一个周期的估计值就能估计当前的状态,这个估计出来的当前状态综合考量了传感器数据(即所谓...
2021-11-16 09:10:40
[开发工具] STM32算法的翅膀之MATLAB基于加速度计与气压计的三阶卡尔曼滤波计算加速度、速度及高度主要介绍了卡尔曼滤波器的使用原理,给出了matlab代码,并在STM32F407平台对卡尔曼滤波器进行了验证,传感器为MPU6050与DPS310,测试结果令人满意,速度与高度无累积...
2021-08-17 07:02:07
最近两日在看卡尔曼滤波。看完理论后,从网上搜索了一段代码来看,然后就懵逼了。这段代码被人转的次数特别多,应该做飞控的都用过。不知道各位有没有自己推导过。反正我是中间有一步不太懂。在这里先把自己弄懂
2019-08-04 19:41:37
本帖最后由 huangdewen 于 2015-4-8 23:19 编辑
收藏的一些关于卡尔曼滤波算法的教程,简单易懂自己写的代码#define dt 0.001//微分时间#define
2013-09-13 17:52:42
卡尔曼滤波器通俗讲解
2016-08-17 12:06:59
观察状态的一个重要用途是估计速度。通常在不同的关节上安装位置传感器(编码器); 然而,简单地区分位置以获得速度会产生噪声结果。为了解决这个问题,可以使用卡尔曼滤波来估计速度。卡尔曼滤波器的另一个很好的特性
2018-07-27 11:51:46
用最广泛的就是估计理论中的卡尔曼滤波方法。与其他估计算法相比,卡尔曼滤波具有显著的优点:采用状态空间法在时域内设计滤波器,用状态方程就可以描述任何复杂多维信号的动力学特性,避开了在频域内对信号功谱做
2018-11-14 15:12:26
算法在四轴飞行器视觉辅助导航方法中的应用情况,并对比Kalman 方法,UKF 和EKF 算法融合四轴飞行器多传感器信息的效果。
2021-05-13 06:06:01
最近正在学习卡尔曼滤波算法,用LabVIEW仿照C语言写了个一维的卡尔曼滤波程序,不知写的对不对,发上来希望大家指正。
2017-10-21 21:15:50
) * randn; %观测值 %扩展卡尔曼滤波器 %进行估计第一阶段的估计 e_x_estimate_1 =2*(k-1)+2;%1 状态估计 e_y_estimate
2017-04-03 17:57:17
labview中,去哪下载卡尔曼滤波器工具包,能给个网址么?谢谢了~~~~~
2013-12-16 15:44:09
最近想做四轴飞行器,在论坛看到这个帖子MikroKopter:来自德国的开源四轴飞行器项目bbs.elecfans.com/jishu_475743_1_1.html小弟看过之后对其中有些内容不太了解,四轴飞行器不是卡尔曼滤波最好吗?这个mikrokopter的代码是不是用的卡尔曼滤波器?
2015-06-11 17:27:38
,传感器返回值都是不够准确的。需要用DSP芯片对飞行器各飞行模态的传感器返回信息进行处理,处理的算法是根据卡尔曼滤波理论开发的。这个项目的核心就是用DSP芯片对卡尔曼滤波算法进行实现,难点是研究出一种效果好的卡尔曼滤波算法。
2015-10-09 15:12:30
相应的滤波算法卡尔曼滤波要点建立系统模型,确定滤波量 确定预测量 确定测量量 进行五个方程计算滤波传感器融合在陀螺仪和加速度传感器滤波的融合中,我们得首先建立起模型(融合只适用于重力情况下,若加速度传感器
2015-06-12 15:11:05
前一段时间看到一篇论文,里面有一部分讲解卡尔曼滤波,感觉讲的挺简单易懂的,现在分享一下只讲不分享不是真汉纸!!这里有卡尔曼滤波器simulink模型,这里作为滤波器用。如果改变一些参数,也可以做辨识用。一码多用,朋友们要记得回复啊~
2015-06-05 15:26:39
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波
2019-07-14 06:30:00
为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当
2016-09-12 22:16:05
估计很多使用mpu6050的人看网上卡尔曼滤波资料时看不懂下面这段程序,我找到一个资料,对其进行了解释。P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0
2017-03-25 21:07:57
网上搜到一篇关于卡尔曼滤波算法的论文,对低维卡尔曼滤波算法作了几何解释,这种解释对卡尔曼滤波有一种直观的理解,使人们对卡尔曼滤波有更本质的认识。有需要的童鞋带走吧
2015-06-11 15:28:33
卡尔曼滤波实现简单,滤波效果好 ,下面分享一个基于卡尔曼滤波的matlab算法,数据全部为一维状态,本人弥补的详细备注,供爱好者研究学习。%%%%%%%%%%%%%%%%%%%功能说明:Kalman
2019-08-01 04:35:51
采用CarlsON 最优数据融合准则, 将基于Kalman 滤波的多传感器状态融合估计方法应用到雷达跟踪系统。仿真实验表明,多传感器Kalman 滤波状态融合估计误差小于单传感器Kalman 滤波得出的状态估计误差,验证了方法对雷达跟踪的有效性。
2020-04-06 07:42:16
://blog.csdn.net/u011344545==========================================本文设计了一种基于STM32/51单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪(直接上代码)代码下载(附PPT)MPU-6050 :是6轴运动处理
2022-02-10 07:57:19
目标跟踪算法的研究,并加入噪声干扰,更接近真实的军事与民用环境。首先搭建红外/雷达双模导引头仿真平台,进而设计基于多传感器的多模型机动目标跟踪算法,采用扩展卡尔曼滤波,最终实现算法的软件仿真及跟踪性能
2018-12-05 15:16:23
本帖最后由 crux 于 2015-5-10 07:51 编辑
今日开新贴,明天发布BOM。 小车卡尔曼滤波融合算法简介: 卡尔曼滤波的基本思想是:以最小均方误差为最佳估计准则,采用信号
2015-05-10 07:47:46
基于无迹卡尔曼滤波的四旋翼无人飞行器姿态估计算法_朱岩
2020-06-04 08:48:36
= q3 * norm;这是单变量的卡尔曼滤波器:float KalmanGain;//卡尔曼增益float EstimateCovariance;//估计协方差float
2015-05-22 15:12:20
。2.数字滤波算法的选择根据运动传感器噪声模型,一般以下滤波算法可供融合算法选择: a)互补滤波算法 b)扩展卡尔曼滤波算法 c)无迹卡尔曼滤波算法 d)粒子滤波算法 e)Mahony互补滤波算法
2019-07-19 06:47:49
的矩阵,对于单模型单测量,I=1。当系统进入k+1状态时,P(k|k)就是式子(2)的P(k-1|k-1)。这样,算法就可以自回归的运算下去。卡尔曼滤波器的原理基本描述了,式子1,2,3,4和5就是他
2015-05-22 10:47:54
` 本帖最后由 Struggle! 于 2015-5-22 11:02 编辑
逛博客看到的一篇讲解卡尔曼滤波的文章,发现程序十分简洁易懂,而且使用效果不错,是一个学习的典范,在此分享了!下面附上
2015-05-22 10:58:16
摘 要:利用最优的融合簇状态估计的K rein 空间卡尔曼滤波方法,得到信息形式的鲁棒卡尔曼滤波。簇头节点通过所处簇的观测模型,利用信息形式的鲁棒卡尔曼滤波实现离散形式的卡尔曼滤波。簇头节点将状态
2009-10-05 17:28:51
有偏卡尔曼滤波器可以用来消除无线定位中的非视距误差,首次使用有偏卡尔曼滤波器的参考文献是下面两篇论文[1]刘琚,李静.一种在非视距环境中的TDOA/AOA混合定位方法[J].通信学报,2005,26
2011-11-07 13:55:15
翻了一些论文,大多都是堆一下公式,然后用DSP Builder有没有用verilog实现过卡尔曼滤波器的?想讨论一下。整个算法实现下来,最大运行频率是多少?从输入到输出延时有多少?耗费资源情况大概怎样?
2017-09-13 10:01:01
有没有基于9轴传感器的三阶卡尔曼滤波器算法
2023-11-06 06:00:44
系统动态模型不确定性和噪声协方差不准确限制的问题,仿真结果验证了算法的有效性【关键词】:高斯过程回归;;平方根无迹卡尔曼滤波器;;自适应【DOI】:CNKI:SUN:KZLY.0.2010-02-005
2010-04-24 09:04:39
*0.01;//角速度积分得到倾斜角度.//-------卡尔曼滤波融合-----------------------Kalman_Filter(Angle_ax,Gyro_y); //卡尔曼滤波计算倾角
2019-03-28 06:08:01
算法完成实现什么功能?比如我是不是可以这样:先写卡尔曼滤波器算法,然后添加程序追踪鼠标位置程序,最后运行实现就可以了?{:4_97:}那那个转换测量是什么意思??谢了各位啊~
2013-01-15 12:29:16
数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。二、卡尔曼滤波器的通俗理解。这是网上的关于解释卡尔曼滤波器原理的一个经典例子
2016-06-17 14:59:09
本帖最后由 南中南 于 2015-12-31 11:01 编辑
四轴飞行器组合导航非线性滤波算法基于展卡尔曼滤波和不敏卡尔曼滤在四轴飞行器中的数学模型,研究扩展卡尔曼滤波( Extended
2015-12-31 10:53:54
卡尔曼滤波器可以从数据序列中排除干扰噪声,使用卡尔曼滤波器可以从不完整的信息给出一个不断变化中复杂系统的最优估计。我们把某种网络抽象为一个电阻,现在我们要用传感器(当然不是简单的万用表欧姆档测电阻哈
2019-05-22 07:06:05
(英文版)MATLAB在卡尔曼滤波器中应用的理论与实践KalmanfilteringtheoryandpracticeusingMATLAB-email
2020-03-12 12:35:17
介绍了基于多传感器信息融合技术的联合卡尔曼滤波器的一般设计方法,并将此方法运用于舰船INS/ GPS/ Loran2C 组合导航系统中。理论分析与仿真结果表明,该联合卡尔曼滤波器的设计合
2009-06-25 08:35:41 32
32 本文将强跟踪滤波理论与多传感器数据融合技术相结合,提出基于强跟踪滤波器的多传感器状态与参数联合估计新算法;对拥有相同采样率的分布式多传感器单模型非线性动态系统,
2009-06-30 10:43:5019 对集中滤波器和分散滤波器的性能特点进行了比较和分析,指出了它们应用于多传感器系统时的不足之处,提出了联合卡尔曼滤波器的结构和算法,并在精度、计算效率和容错能力方
2009-07-09 13:47:0635 介绍了基于多传感器信息融合技术的联合卡尔曼滤波器的一般设计方法,并将此方法运用于舰船$I& L MN& L %D)*5 O 0 组合导航系统中。理论分析与仿真结果表明,该联合卡尔曼
2009-07-11 11:05:5017 扩展卡尔曼滤波估计载波参数的算法研究:提出了一种在接收信号幅度未知的情况下进行载波参数估计的扩展卡尔曼滤波算法,该算法把信号幅度及伪码自相关的乘积作为一个独立变
2009-10-20 18:04:1834 电池SOC的自适应平方根无极卡尔曼滤波估计算法,下来看看
2017-01-13 13:26:0218 电池SOC的自适应平方根无极卡尔曼滤波估计算法_胡志坤
2017-01-07 17:16:231 一种基于增量式卡尔曼滤波器的PMSM转速滤波算法_肖曦
2017-01-08 11:28:385 卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波
2017-10-29 11:57:09 28424
28424 
针对惯性导航应用中,姿态解算与外力加速度估计互相干扰的问题,提出一种基于四元数和扩展卡尔曼滤波器的姿态解算与外力加速度同步估计算法。首先,利用估计的外力加速度修正传感器加速度数据得到准确的反向
2017-12-19 14:11:576 卡尔曼滤波器是一种由卡尔曼(Kalman)提出的用于时变线性系统的递归滤波器。这个系统可用包含正交状态变量的微分方程模型来描述,这种滤波器是将过去的测量估计误差合并到新的测量误差中来估计将来的误差。
2018-02-07 18:06:464690 
用的状态估计方法。直观上来讲,卡尔曼滤波器在这里起了数据融合的作用,只需要输入当前的测量值(多个传感器数据)和上一个周期的估计值就能估计当前的状态,这个估计出来的当前状态综合考量了传感器数据(即所谓...
2021-11-09 13:06:041 在很多实际工程问题当中,非线性系统占大多数,而卡尔曼提出来的卡尔曼滤波器是一种针对线性系统的估计算法[1]。 为了解决这一问题,Schmidt学者分析了卡尔曼滤波器中的系统模型部分,并提出将卡尔
2022-08-12 10:06:324595 
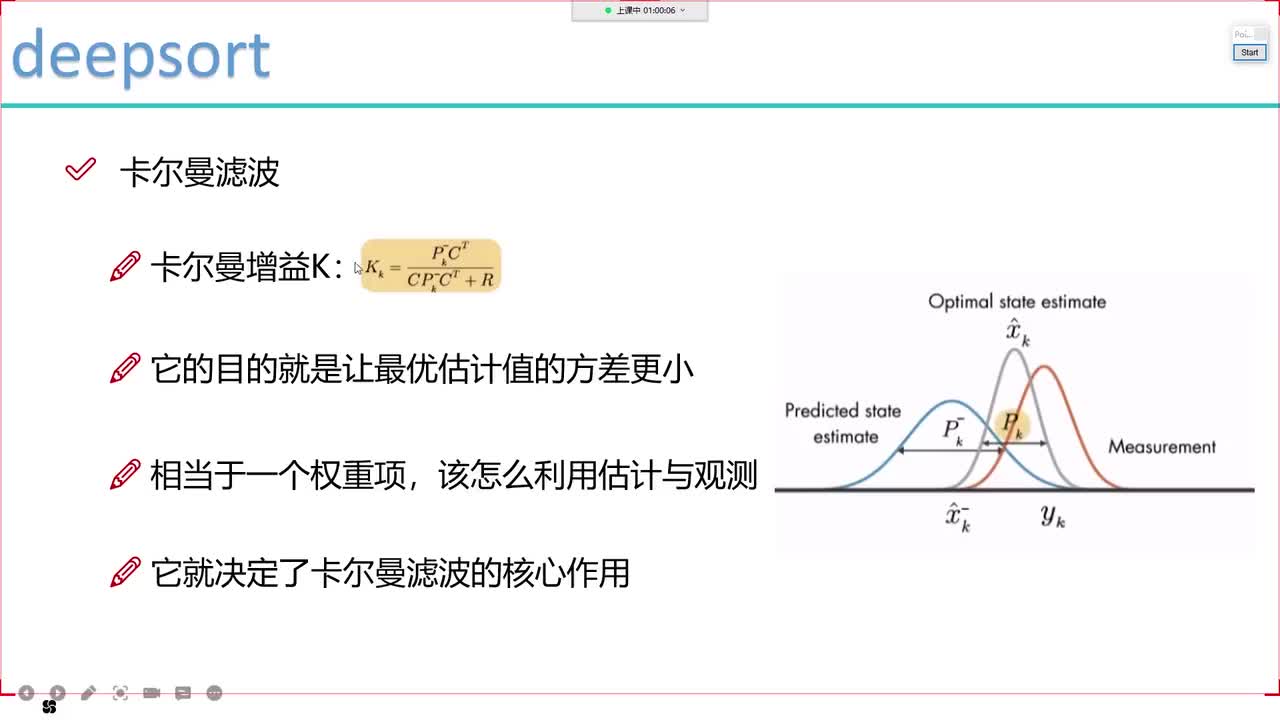
卡尔曼滤波的最终输出是,真实的状态为,令 对误差的平方求最小值,同样可以推导出公式(1-5)到公式(1-7)。因此卡尔曼滤波器也是系统状态的最优估计。
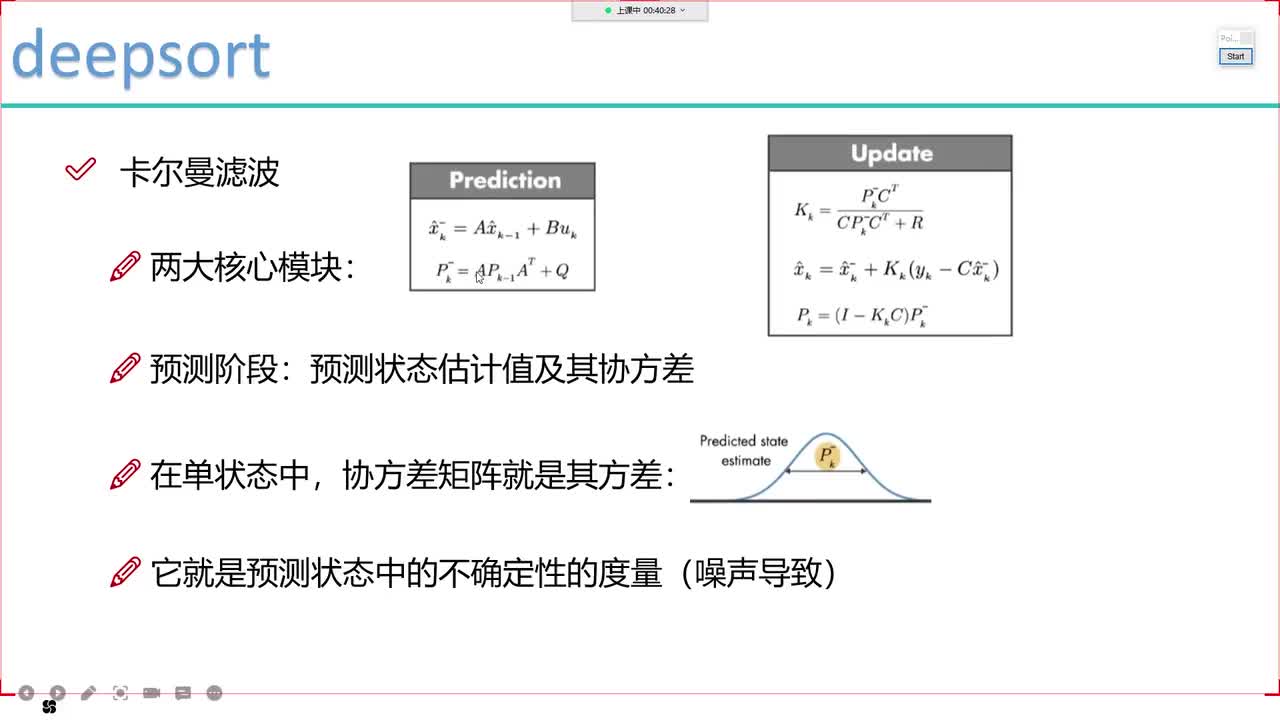
2022-12-15 10:45:132079 卡尔曼滤波是一种线性最小方差估计,是一种最优估计算法。 其采用递推算法,通常只要系统的初始状态和初始误差矩阵已知,根据导出公式,就可对
系 统状态做出较为精确的估计。 使用状态空间法在时域内设计滤波器,其离散型算法较容易实现数字化。
2023-03-14 10:38:451 卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。
2023-08-30 10:18:351327 卡尔曼滤波(Kalman Filter)是一种用于估计状态的算法,最初由R.E. Kalman在1960年提出。它是一种线性高斯滤波器,常用于处理包含误差噪声的动态系统。卡尔曼滤波算法通过组合测量
2024-01-17 10:51:51401
 电子发烧友App
电子发烧友App





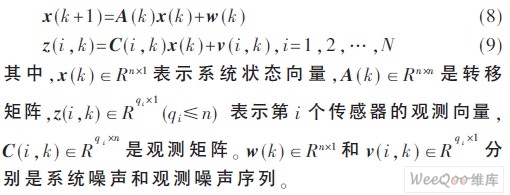

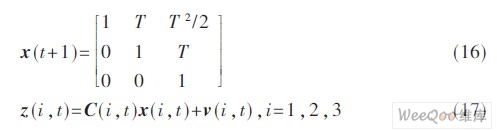
 分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设
分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设 不相关, 则最优联邦滤波器最优数据融合准则由下式给出:
不相关, 则最优联邦滤波器最优数据融合准则由下式给出:



 的估计误差协方差。
的估计误差协方差。

 ,其中
,其中 和
和












 工商网监
工商网监
评论