SLAM作为一种基础技术,从最早的军事用途(核潜艇海底定位就有了SLAM的雏形)到今天,已经逐步走入人们的视野,过去几年扫地机器人的盛行让它名声大噪,近期基于三维视觉的VSLAM又让它越来越显主流。
2018-08-08 10:07:28 9778
9778 特征点法的VSLAM系统中,特征点并不是越多越好;相反, 少量 并且 质量高 的点会让这个SLAM系统位姿精度更高,且消耗更少的存储资源和计算资源。
2022-08-23 11:09:481197 激光SLAM局部定位精度高但全局定位能力差且对环境特征不敏感,而视觉SLAM全局定位能力好但局部定位相对激光雷达较差,两者融合可以提高SLAM系统的精度和鲁棒性。
2023-10-23 11:01:14650 
LiDARInnovizPro、S3、SLAM on Chip、VLS-128。激光雷达是自动驾驶系统中一个非常重要的组件。在许多传统供应商和新创公司看来,未来自动驾驶汽车在障碍探测和 SLAM(实时定位和地图构建
2018-07-26 20:45:02
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。 其实,SLAM≠机器人自主定位导航 ,不解决行动问题。 SLAM如其名一样,主要解决的是机器人的地图构建
2018-08-24 16:56:24
结合激光雷达或者摄像头的方法,让扫地机可以高效绘制室内地图,智能分析和规划扫地环境,成功让自己步入了智能导航的阵列。除了扫地机之外,SLAM技术在其他服务机器人(例如商场导购机器人、银行机器人
2018-12-06 10:25:32
目前,SLAM(即时定位与地图构建)技术主要被运用于无人机、无人驾驶、机器人、AR、智能家居等领域,从各应用场景入手,促进消费升级。 机器人 激光+SLAM是目前机器人自主定位导航所
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入SLAM的坑!心中
2021-08-30 06:13:31
通过编码器获得轮式里程计的测量数据,车轮的转动被转换成线性位移。对于指定初始位置的运动估计,通过积分得运动增量,从而得到当前的位置信息。 · 该方法具有精度短、成本低、采样率高的优点 · 但车轮会产生打滑,定位误差会随着移动距离增加,影响长期精度 (2)惯性导航 惯性导航系统是自主的,..
2021-09-01 07:15:25
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
机器人定位导航中,目前主要涉及到激光SLAM与视觉SLAM,激光SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?视觉VSLAM又是什么?激光SLAM和视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
先进的SLAM(同步定位与建图)技术利用激光雷达实时获取环境地图信息,通过处理得到外部地图实现建图定位、路径规划、避障、人体跟随等功能达到导航精度厘米级、导航速度0.5m/s级 激光导航AGV为了实现
2017-06-10 14:24:17
`众所周知,国外的工业机器人比国内发展的早的很多,智能的工业机器人四大家族;ABB、发那科、安川、库卡、服务机器人几乎是国内外同时起步的。国外一台激光导航AGV的价格在100万左右,国内的激光导航
2017-07-31 11:43:49
,固态设计和灵活操作。同时,激光传感器多数应用于质量控制、防错和定位等。 新特光电提供的这款光学锥光全息传感器基于独特的锥光全息专利技术,优于现有各种工业应用的标准距离测量方法。该传感器可靠、准确,不
2021-02-20 11:44:52
传统方法劣势:开封质量差,处理时间长,不环保,需耗材 激光开封优势:能处理传统酸开封无法处理多层邦定芯片;能处理传统开封无法处理的GEL封装材料;能干净处理含不同辅料的封装层(如玻璃细珠)大族激光新推出独有专利激光开封机,欢迎随时咨询185-6629-8831
2014-04-02 16:07:44
是激光雷达+SLAM的定位导航技术。 SLAM表示在不具备周围环境信息的前提下,让移动机器人在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建周围环境地图。SLAM可以提高
2018-11-09 15:59:01
GPS北斗卫星+惯性组合导航模块有哪些优势呢?普通GPS北斗模块在环境复杂的城市环境中定位没有那么精确,时常出现漂移、定位慢、无法定位等情况,比如在高架桥下,在穿山隧道里面,卫星信号微弱或者完全没有
2019-07-15 04:35:55
把部分错误解决了而没有写出来。SLAM是指同时定位与地图构建,但是在很多情况下并不需要同时定位和地图构建;在实际应用中,我们会提前在运行环境下构建好地图,然后让机器人在已知的地图内运行。比如让机器人送物品
2019-08-21 22:12:16
项目名称:机器人激光与视觉融合的导航模块试用计划:申请理由本人在机器人SLAM领域有4年开发经验,从最开始激光SLAM到视觉SLAM,在物流机器人行业不断创新开发。SLAM技术将赋予为机器人和智能体
2019-07-03 10:50:01
机器人定位导航方式目前机器人常用的定位导航方式有激光定位导航、视觉定位导航、红外线定位导航、超声波定位导航、GPS全球定位导航等。1.激光定位导航激光雷达+SLAM技术相结合的激光定位导航主要是通过对目标
2018-10-11 17:49:40
SLAM是什么?VSLAM技术框架主要包括哪些?VSLAM技术拥有哪些核心技术优势?
2021-07-09 07:29:11
北斗与自动驾驶北斗导航系统怎么样北斗导航的优势及应用现状
2021-02-05 07:34:26
单片机和嵌入式谁更有前景?
2012-06-09 01:55:55
有很多种不同的分类方法。对于导航定位天线,我们有太多的叫法,很多时候我们会把不是一个维度的两个称谓拿来比较,这就好比苹果手机和大屏手机哪个好,没法比,要比就比iphone8和note8。废话少说,直入正题。
2019-08-15 06:34:27
`文字篇幅有点长,可以先Mark。本文来自博客《移动机器人定位与地图创建(SLAM)方法》稍作修改,侵删!1.前言:随着计算机技术的迅速发展,机器人研究的深入以及人们对机器人需求的扩大,能自主导航
2017-09-21 14:26:44
如何实现基于RK3399开发板的cartographer激光SLAM建图模块的设计?
2022-03-07 07:05:11
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
的形状和周围环境,结合SLAM算法和视觉传感器,进行SLAM避障与导航。图源:Science Robotics障碍物规避A1激光雷达通过不断的旋转,发射激光出去,接受激光返回,算出障碍物距离当前的距离
2021-11-12 14:12:43
的工作环境要求。 SKM-4DX引脚定义: 此惯性导航模块的优势:(1)摆脱里程计常规车载导航系统往往依靠里程计和陀螺仪的DR方案,实现汽车复杂环境下的高精度导航定位,里程计信号对于很多汽车后装市场
2020-08-13 01:29:45
一.机器人导航算法工程师岗位职责:1. 负责机器人视觉或激光雷达的SLAM算法的研发和优化;2. 负责机器人自主导航定位算法的研发,主要包括基于深度相机或激光雷达、IMU、里程计等多传感器信息融合
2020-06-08 05:06:44
服务机器人想要自由行走,实现自主定位导航是关键,自主定位导航包括定位、建图与路径规划。SLAM作为机器人定位导航的核心技术,正不断获得行业内的重视,但SLAM只是完成定位与地图创建这两件事,它并不
2018-10-10 16:29:21
定位导航模块核心功能 自主定位与建图采用激光SLAM技术,无需对环境进行修改,即可在未知场景中完成实时定位并利用SharpEdge构图技术测绘高精度、厘米级别地图,无需二次优化修饰,直接满足用户心理
2018-01-03 11:41:55
。据了解,在不同技术路线中,所使用到的传感器主要有激光雷达、毫米波雷达以及摄像头三类,且各具优缺点。 一、主流传感器对比激光雷达:激光雷达具有高精度、高分辨率的优势,同时具有建立周边3D模型的前景
2017-09-06 11:36:58
自主导航小车AGV定位方法的研究[1]
2016-08-29 11:07:35
问题,以下为几个具体的定位方法:1、业内通用的定位方式是GPS+高精度地图+摄像机(激光雷达等)信息融合的定位方法。激光雷达的SLAM,利用车辆自带的GPS和IMU做出大概位置判断,然后用预先准备好
2019-05-09 04:41:09
视觉SLAM——特征点法与直接法对比以及主流开源方案对比 ORB LSD SVO DSO
2020-06-02 16:56:49
图引擎,让机器人在复杂、大面积的场景下也能轻松应对,稳定发挥,完成定位导航任务。 传统SLAM 及SLAM 3.0的建图对比: -建图精度高,图优化式建图 - 主动闭环修正 - 建图稳定、不
2019-01-21 10:57:46
车载定位定向导航系统是由哪些部分组成的?怎样去设计车载定位定向导航系统?
2021-05-13 06:46:43
1、引言近年来,智能交通、无人驾驶、车辆紧急定位报警等业务需求越来越迫切,车载导航定位功能是实现上述业务的基础。车辆的导航定位通过前装或后装车载终端来完成,其性能指标直接影响相关业务的用户体验,因此对车载终端的导航定位性能进行测试评估是非常必要的。
2019-07-11 06:14:33
建图,路径规划、自主避障等任务,它是目前性能最稳定、可靠性最强的定位导航方法,且使用寿命长,后期改造成本低。 扫地机器人是目前单线激光雷达应用最广泛的领域,激光雷达配合slam算法,可以让扫地机
2018-12-10 14:55:39
本文研究了基于多传感器组合导航方法的SLAM,由于移动机器人无法通过单个传感器得到可靠的信息,采用多传感器组合导航的方法可以很好的解决这个问题。本文用单个CCD摄像头和里程
2011-11-04 16:53:00 91
91 LNM-v1.0 激光导航模块是一款基于室内复杂坏境的导航模块,该模块通过激光雷达对室内环境进行扫描自主构建地图。LNM 模块只要配合激光雷达或者二维深度传感器就可以自主构图并自主规划路径,可在室内真正的实现机器人的无轨自主导航。
2017-08-28 10:05:3424 、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。 由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光SLAM 和 VSLAM 两大类。其中,激
2017-11-22 11:52:333 移动机器人在探索未知环境且没有外部参考系统的情况下,面临着同时定位和地图构建( SLAM)问题。针对基于特征的视觉SLAM( VSLAM)算法构建的稀疏地图不利于机器人应用的问题,提出一种基于八
2017-11-24 16:33:3423 高仙的SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义SLAM。高仙SLAM2.0技术方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:308534 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划和运动控制。在SLAM技术帮助机器人确定自身定位和构建地图之后,进行一个叫做目标点导航的能力。
2018-08-26 10:04:5820986 SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。
2018-11-14 08:54:017334 MYNTAI,凭借其双目+vSLAM技术的机器人视觉导航整体解决方案在激烈的角逐中脱颖而出,斩获了最佳机器人定位导航方案奖。
2018-12-20 16:47:382475 通过以上分析可以得出,激光导航、视觉SLAM导航AGV相较于二维码导航AGV运行更加灵活、维护成本更低、调度范围更广、定位精度更高。在制造业中,激光导航、视觉SLAM导航AGV以其鲜明的优势,能够更好满足其需要。
2019-07-31 15:50:294000 在餐厅、酒店、商场等服务场所,我们已能看到一些自主行走的服务机器人,他们能做到自主路径规划、自动避开障碍物等功能,这主要得益于机器人定位导航技术的进步。在实现机器人导航方法中,目前主要有激光SLAM
2019-08-05 13:52:3010559 的激光雷达解决方案,而VSLAM主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。2.应用场景从应用场景来说
2019-08-09 17:31:201430 的激光雷达解决方案,而VSLAM主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。2.应用场景从应用场景来说
2019-09-11 22:01:351759 近年来,伴随移动机器人在各行各业的广泛应用,SLAM这个“名字”逐渐被更多的人所熟悉,但是SLAM具体是什么、SLAM有哪些应用领域、激光SLAM和视觉SLAM哪种方式更有优势等等这些问题却总是模糊不清。今天,小编就带大家来详细了解一下~
2020-01-18 17:43:003117 SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。
2020-03-30 10:39:112647 SLAM作为机器人自主定位导航的重要突破口正不断引起业内重视,它是实现机器人自主行走的关键技术,可帮助机器人实现即时定位与地图构建,在实际应用中,SLAM技术究竟又是如何实现的呢?一起来探个究竟
2021-10-14 14:35:091402 目前市场上主流的导航技术主要是两种,一是基于激光测距传感器的SLAM,简单说就是激光导航,另一种是基于机器视觉的SLAM,我们也称之为视觉导航。
2020-07-29 16:23:266088 本文研究了基于多传感器组合导航方法的SLAM,由于移动机器人无法通过单个传感器得到可靠的信息,采用多传感器组合导航的方法可以很好的解决这个问题。本文用单个CCD摄像头和里程计组合进行SLAM研究
2020-08-07 17:14:0112 在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53:3016068 
大家都知道,机器人智能移动(自主定位导航)包含了定位、建图与路径规划。说到定位导航,必然会联想到SLAM,但SLAM只是完成定位与地图创建这两件事,它并不完全等同于自主定位导航。 定位 不管你有没有
2021-10-14 14:28:279122 。 工博会现场仙工智能展位发布会现场 技术火花碰撞,全新突破 这款全球首发的激光SLAM多层料箱机器人由海柔创新与仙工智能联合开发,可实现激光SLAM导航,内置仙工智能SRC核心控制器,集导航、安全、多功能等于一体,实现柔性对接、精准取放、高
2020-09-25 16:25:492171 伴随着技术的不断革新,AGV导航方式也正朝着多样化的趋势发展。但真正成熟且规模化应用的,目前仍然只有传统的磁条、二维码及新兴的激光导航等。 哪种导航方式是主流? 不同导航方式优缺点对比 磁条导航目前
2020-10-13 13:46:468572 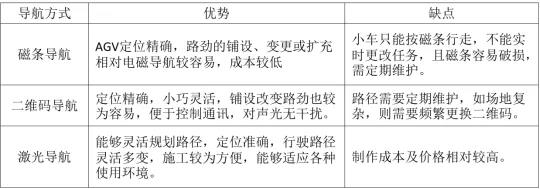
小型堆高式自动叉车SFL-CDD14 从其优势特点可看出,两者都是基于仙工智能(SEER)SRC核心控制器打造的激光SLAM自动叉车,与仙工智能(SEER)其他系列自动叉车相同,拥有卓越的性能。 适配
2020-10-09 14:53:111763 摘要 冠鸿智能本次提供的前段工序高精度AGV导航方式采用激光SLAM导航,举升定位精度高达1mm,而目前行业内激光SLAM导航的AGV定位精度普遍在10mm。 动力电池产线对规模化、智能化、柔性化
2020-10-29 16:02:559842 SLAM作为机器人自主定位导航的重要突破口正不断引起业内重视,它是实现机器人自主行走的关键技术,可帮助机器人实现即时定位与地图构建,在实际应用中,SLAM技术究竟又是如何实现的呢?一起来探个究竟。
2020-12-26 09:23:19568 SLAM这个“名字”逐渐被更多的人所熟悉,但是SLAM具体是什么、SLAM有哪些应用领域、激光SLAM和视觉SLAM哪种方式更有优势等等这些问题却总是模糊不清。
2020-12-26 09:39:322084 定位技术是机器人实现自主定位导航的最基本环节,是机器人在二维工作环境中相对于全局坐标的位置及其本身的姿态。目前SLAM (Simultaneous Localization and Mapping即时定位与地图构建)是业内主流的定位技术,有激光SLAM和视觉SLAM之分。
2020-12-26 10:59:431285 机器人领域 主要应用于机器人定位导航领域:地图建模。 SLAM可以辅助机器人执行路径规划、自主探索、导航等任务。国内的科沃斯、塔米以及最新面世的岚豹扫地机器人都可以通过用SLAM算法结合激光雷达或者摄像头的方法,让扫地机高效绘制室内地图,智能分析和规划扫地环境,从而成功让自己步入了
2020-12-31 09:49:427086 
SFL-CBD20-S采用了目前最稳定最主流的导航方式——激光SLAM导航,无反光板,部署方便,内置仙工智能(SEER)SRC核心控制器,可提供地图构建、定位、导航等基础功能和多机调度、自动充电、3D 避障等功能,让定位更精准,使运行更安全。
2021-02-04 16:43:562081 激光slam导航的优点是技术成熟,能够灵活规划路径,定位精度高,行驶路径灵活多变,施工较为方便。
2021-03-21 11:33:002466 环境适应鲁棒性,旷视激光SLAM导航AMR(自主移动机器人)——MegBot S800斩获2021 LT中国物流技术“创新产品奖”。 旷视于2017年进入供应链物联网领域,率先推出了智慧物流操作系统“河图”,并自研了AMR机器人、人工智能堆垛机、智能圆盘播种机等多款智能物流硬件,目
2021-03-29 16:23:182405 ,使重釆样后的粒子保持多样性。结合似然域模型与意外对象观测概率,使激光测量模型更好地反映真实环境。实验结果表明,改进的重釆样方法定位效果较好,相对原激光SLAM算法,改进的激光SLAM算法在动态环境中的建图和定位精度更高。
2021-04-01 10:48:316 SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
2021-04-18 10:15:204642 
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2021-04-18 10:18:1212156 
课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
我看来,vslam得发展也就是从MonoSLAM->PTAM->图优化SLAM->ORB-SLAM为代表的现代slam,其中可能还有许多内容,不过这些开源SLAM一定程度上体现了SLAM发展过程了....
2021-06-18 10:40:521357 
无人平台在大范围环境中 实现自 主定位与导航的能力 需求日 益严苛, 其中 基于激光雷达的同步定位和绘图 技术(SLAM) 是主流的研究方案。 在这项工作中, 本文系统概述了 3D 激光雷达SLAM
2022-03-21 16:07:574576 近日,业内首款扫地机器人SLAM导航用VCSEL激光雷达量产出货。该系列激光雷达产品搭载瑞识科技VCSEL激光模块,凭借低功耗,高稳定性与成本的优势,成功进入国内扫地机器人头部企业供应链并已量产
2022-09-14 11:08:331302 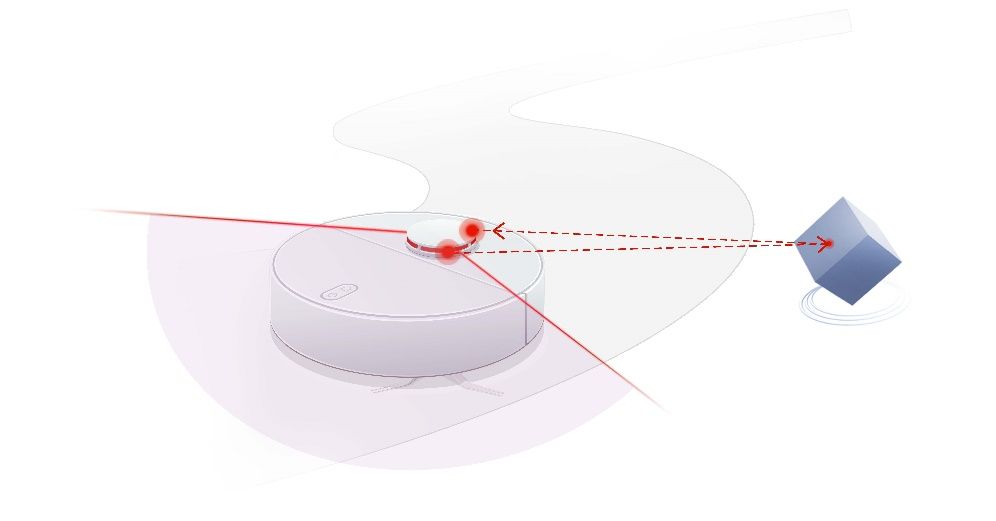
相比栅格地图,这种地图看起来就不那么直观了。它一般通过如GPS、UWB以及摄像头配合稀疏方式的vSLAM算法产生,优点是相对数据存储量和运算量比较小,多见于最早的SLAM算法中。
2022-09-21 15:30:48764 同时定位和映射(SLAM)是大多数自主系统所需的基本能力。在本文中,我们讨论了基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题。
2022-10-27 11:08:14772 近年来,基于视觉的传感器在SLAM系统中显示出显著的性能、精度和效率提升。在这方面,视觉SLAM(VSLAM)方法是指使用相机进行姿态估计和地图生成的SLAM方法。
2022-11-01 09:53:261866 库执行立体视觉同步定位和绘图(VSLAM),并估计立体视觉惯性测距。 在首次 Isaac ROS 线上研讨会上,您将学习到如何使用 Isaac ROS Visual SLAM 进行测绘和机器人导航。 研讨
2022-11-10 11:00:21646 (Visual SLAM,VSLAM)是将图像作为主要环境感知信息源的SLAM系统,VSLAM以计算相机位姿为主要目标,通过多视几何方法构建3D地图[4]
2022-12-02 15:00:281149 一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2023-03-27 11:06:561385 深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累
2022-02-08 14:56:412438 
视觉纹理导航,亦称Visual SLAM导航,通过自动导引车车载视觉传感器获取运行区域周的图像信息来实现导航的方法。视觉导航是以地面纹理为特征信息的视觉导航AGV
深圳市不止技术有限公司是激光
2022-04-29 10:01:032613 
正如图中所示,机器人自主定位导航技术中包括:定位和地图创建(SLAM)与路径规划和运动控制两个部分,而SLAM本身只是完成机器人的定位和地图创建,二者有所区别。
2023-08-03 11:12:00697 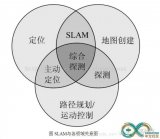
前言 Athena 2.0是思岚研发的搭载全新的SLAM自主定位导航系统及激光视觉多重导航方案,能够自主上下电梯,实现多楼层之间自主移动的智能机器人底盘。 Athena2.0智能机器人底盘
2023-10-13 09:21:32720 什么是激光雷达3DSLAM?在了解这个概念之前,我们首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即时定位与建图。通俗
2023-11-25 08:23:57998 
激光 SLAM 任务是搭载激光雷达的主体于运动中估计自身的位姿,同时建立周围的环境地图。而准确的定位需要精确的地图,精确的地图则来自于准确的定位,定位侧重自身位姿估计,建图侧重外部环境重建。
2024-03-04 11:25:0498 
自主定位、导航、路径规划等SLAM算法。
特性
2021-11-17 10:10:25
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论