 电子发烧友App
电子发烧友App


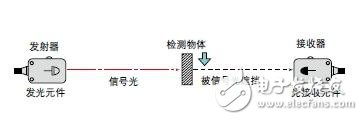
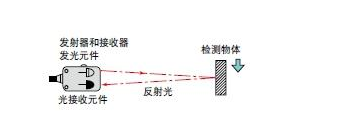
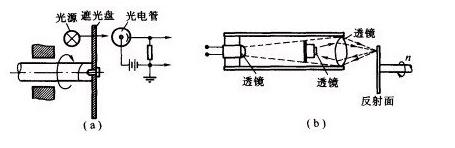
以“光”检测的方式,光电传感器将可见光线及红外线等的“光”通过发射器进行发射,并通过接收器检测由检测物体反射的光或被遮挡的光量变化,从而获得输出信号。
原理和主要类型:由发射器的发光元件进行发光,并通过接收器的光接收元件进行接收。
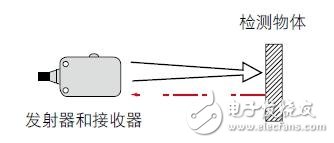
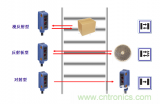
反射型:将发光元件和光接收元件内置于1 台传感器放大器中。接收来自检测物体的反射光。

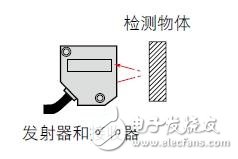
透过型:发射器/ 接收器处于分离状态。如果在发射器/ 接收器之间放入检测物体,则发射器的光会被遮挡。
回归
反射型:将发光元件和光接收元件内置于1 台传感器放大器中。接收来自检测物体的反射光。发光元件的光会通过反光板进行反射,并通过光接收元件进行接收。如果进入检测物体,则会被遮挡。
特点:非接触检测
无需接触检测物体即可进行检测,因此不会划伤检测物体。而且,也不会损伤传感器本身,寿命较长,无需进行维护。
可检测大多数物体:通过物体的表面反射或遮光量进行检测,因此可检测大
多数物体(玻璃、金属、塑料、木料及液体等)。
检测距离长:光电传感器一般为高功率,因此可进行长距离检测。
分类:
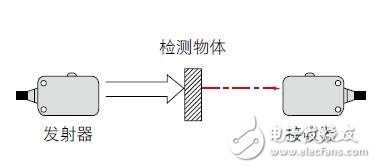
透过型
通过检测物体遮挡对置的发射器和接收器之间的光轴来进行检测。
• 检测距离长。
• 检测位置精度高。
• 若为不透明体,则与形状、颜色和材质无关,可直接进行检测。
• 抗镜头的脏污和灰尘。
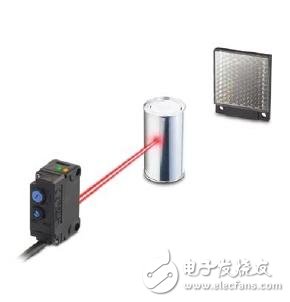
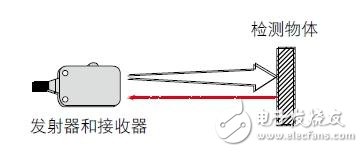
回归反射型
通过检测物体遮挡传感器发射后由反光板返回的光来进行检测。
• 由于单侧为反光板,因此可安装在狭小空间。
• 配线简单,与反射型相比,可进行长距离检测。
• 光轴调整非常容易。
• 若为不透明体,则与形状、颜色和材质无关,可直接进行检测。
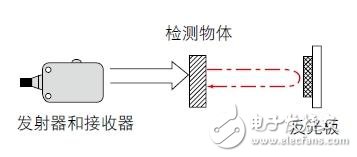
反射型
将光照射到检测物体上,并接收来自检测物体的反射光后进行检测。
• 仅安装传感器本体即可,不占空间。
• 无需光轴调整。
• 若反射率较高,也可检测透明体。
• 可辨别颜色。
窄光束反射型
在检测物体上进行光斑照射,并接收来自检测物体的反射光后进行检测。
• 可检测小型目标物。
• 可检测标记。
• 可从机械等的空隙开始检测。
• 检测点可视。
限定反射型
采用以发射器和接收器为角度的结构,仅检测各自光轴交叉的受限区域。
• 背景影响小。
• 应差距离短。
• 可检测较小的凹凸。

距离设定型
将光斑照射到检测物体上,并通过来自检测物体反射光的角度差异进行检测。
• 不受反射率较高的背景物影响。
• 即使检测物体的颜色和材质的反射率不同,仍可进行稳定检测。
• 可进行小物体的高精度检测。

光泽度辨别用反射型
将光斑照射到检测物体上,通过镜面反射和漫反射的差异来检测光泽度的不同。
• 可在线使用。
• 不受颜色的影响。
• 也可检测透明体。
根据检测环境和安装位置,包括各种类型的光电传感器。为您介绍代表性的分类轴,以便可选择更符合环境的光电传
感器。


二、以“光”检测的方式:光纤传感器
光纤传感器可将光纤连接到光电传感器的光源,并在自由安装到狭窄位置等后进行检测。
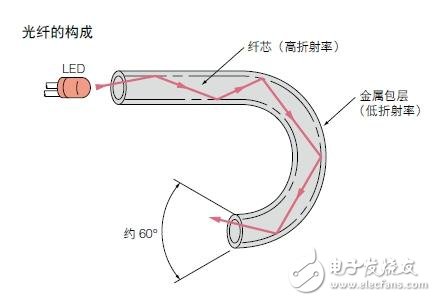
原理和主要类型
光纤如图所示,由中心的纤芯和折射率不同的金属包层构成。光线入射到纤芯时,会在与金属包层的边界面反复进行全反射的同时进入光线。穿过光纤内部,从端面发出的光会以约 60° 的角度进行扩散,并照射到检测物体上。
此外,纤芯包括以下类型。
塑料型
纤芯为丙烯酸类树脂,由0.1 至1 mm 直径的单根或多根制作而成,被聚乙烯等材料包裹。
由于重量轻、低成本及不易弯曲等特性已成为光纤传感器的主流。
玻璃型
由 10 至 100 _m 的玻璃光纤组成,并由不锈钢管包覆。具有使用温度较高(350℃)等特点。
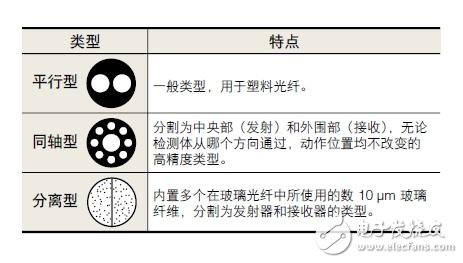
光纤传感器大致分为透过型和反射型2 种检测方法。透过型由发射器和接收器2 条构成。反射型从外观来看好像是1 根,但从端面观察,分为平行型、同轴型及分离型,如下图所示。
特点:
不限安装位置,自由度高
采用了柔韧光纤,可轻松安装到机械的间隙或狭小空间内。
微小物体检测
传感器头尖端非常小,可轻松检测微小物体。
出色的环境抗耐性
只要使用耐热型光纤元件,即使是在高温场所仍可进行检测。
分类:光纤元件包括非常多的类型。传感器头尖端部不设发射元件和光接收元件的检测电路,因而对尺寸或外观的限制较少。
以下为基恩士光纤元件FU 系列的分类示例。


解说选择光纤元件时重要术语含义。
光纤长度
光纤元件的长度。长度越长,越可安装在距光纤放大器较远的位置。
环境温度
可在该温度范围内使用光纤元件。当使用的环境温度较高时,选择耐热型则最
为理想。
弯曲半径
指在即使将光纤元件的半径弯曲到多少mm 使用,仍可在满足检测距离性能
的同时进行无障碍使用。对于装配较为困难的场所,这种半径较小的机型则非
常适合。
检测距离
可检测的距离。检测距离的数值越大,越可进行长距离检测。
光轴直径
主要为透过型光纤元件的指标。在透过型光纤元件中,可对光轴进行全遮光的
大小为标准检测物体的大小。
最小可检测物体
该光纤元件为可最大限度检测的最小检测物体的尺寸。
三、以“光”检测的方式 激光传感器“光强度”辨别型
概要:激光传感器采用了发射元件所拥有直线度的“激光”。由于可观察到光斑,因此在特定光轴调整或检测位置时非常容易。此外,光不会发生扩散,因此无需担心光的偏转等即可进行安装。
原理和主要类型
由发射器的发光元件(激光)进行发光,并通过接收器的光接收元件进行接收。

特点:可观察到光斑,安装轻松激光与LED 不同,由于直线度高,因此可立即了解光斑照射到何处。与光电传感器等设备相比,可大幅削减安装工时。
检测距离长即使是长距离,由于是小光斑,因此无需担心检测距离即可进
行安装。
小光斑精度高
由于为最小50 _m 的小光斑(基恩士产品线),因此也可准确
检测较小的检测物体。
也可在狭小间隙中使用
光不会发生扩散,因此不易导致光的偏转,也支持狭小间隙。
四、以“光”检测的方式 激光传感器“位置”辨别型
概要; 该类型由发射器发射“激光”,并非光强度,并通过检测光接收元件上的接收位置或反光时间来检测目标物的位置信息。
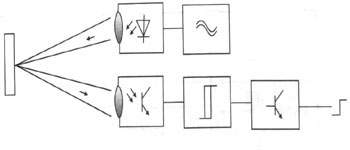
原理和主要类型
三角测量式
通过改变与目标物之间的距离来改变检测元件CMOS 上所聚焦的位置。
使用该位置信息进行检测。

如上图所示,通过半导体激光将激光照射到目标物上。目标物的反射光会在受光镜头上聚焦,并成像在
光接收元件上。距离一旦变动,聚焦的反射光角度也会改变,光接收元件上的成像位置也随之发生变化。
由于该光接收元件上的成像位置变化随目标物的移动量而变化,因此可读取成像位置的变化量,并作为
目标物的移动量进行测量。
时间测量式
在发光的激光照射到物体并返
回的时间内测量距离。不会影
响工件的表面状态,可进行稳
定检测。
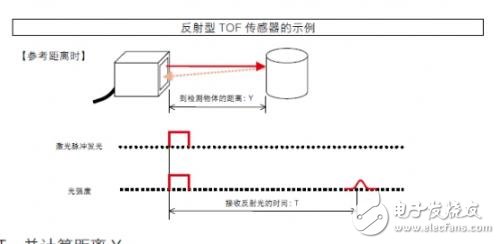
检测上图中接收激光反射光的时间T,并计算距离Y。
计算公式为 2Y(往返距离) = C(光速) × T(接收反射光的时间)。
来源;互联网














 工商网监
工商网监
评论