进行早期应用目标噪声估算时需要考虑多个潜在的误差源。在此过程中需要考虑的 三个常见陀螺仪特性其固有噪声、线性振动响应和对准误差。 图 1的简单模型显示了会影响各误差源评估的几个特性:噪声源、传感器响应和滤波。此模型给出了对这些特性进行频谱分
2017-10-23 10:57:49 12412
12412 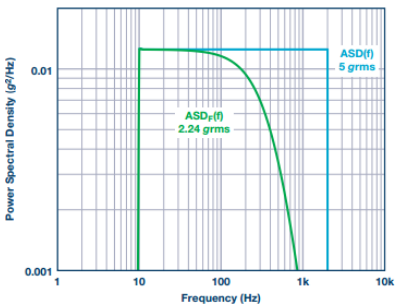
简介对于在反馈环路中采用MEMS惯性测量单元(IMU) 的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的"
2018-10-17 10:39:42
简介对于在反馈环路中采用MEMS惯性测量单元(IMU) 的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的"
2019-10-16 08:00:00
:噪声源、传感器响应和滤波。此模型给出了对这些特性进行频谱分析所需的基准。图1.陀螺仪噪声源和信号链传感器固有噪声传感器固有噪声代表的是陀螺仪在静态惯性和环境条件下运行时其输出中的随机振动。MEMS
2018-10-22 16:44:26
:噪声源、传感器响应和滤波。此模型给出了对这些特性进行频谱分析所需的基准。图1.陀螺仪噪声源和信号链传感器固有噪声传感器固有噪声代表的是陀螺仪在静态惯性和环境条件下运行时其输出中的随机振动。MEMS
2018-11-01 11:15:18
MEMS陀螺仪介绍
2019-08-28 13:00:59
MEMS陀螺仪介绍
2020-05-14 09:31:29
本帖最后由 eehome 于 2013-1-5 09:52 编辑
MEMS陀螺仪的原理与应用优势分析
2012-08-14 22:49:36
MEMS陀螺仪的简单校准
2016-08-17 11:53:03
Mark Looney对于采用MEMS加速度计和陀螺仪的工业系统而言,优化带宽可能是关键考虑因素。这代表着精度(噪声)与响应时间之间的一种经典权衡。虽然多数MEMS传感器制造商都会给出典型带宽指标
2018-10-24 10:42:31
电子器件中使用的传感器处理导致的。这可能导致通过传感器信号路径的相位相关误差波动增加,特别是在卡尔曼滤波器中。MEMS IMU的可用带宽为330 Hz,采用嵌入式的可调滤波系统,提供合理平衡的方法,最大
2018-10-18 10:55:34
用那种型号的单片机和mems陀螺仪配合使用?谢谢大神指导我这位小学生
2017-03-21 20:05:49
MEMS陀螺仪也称电子式陀螺仪,就是一块芯片。 Iphone 4上的陀螺仪就是这种,主要作用是在GPS没有信号时,通过陀螺仪的作用仍然能够继续精确导航。MEMS陀螺仪即硅微机电陀螺仪,绝大多数
2018-10-23 10:57:15
,如此等等。需要注意的是,电容和电感也有误差。但这些误差通常可以忽略不计,在这类直流分析里并无多大的价值。另外,这些器件实际上是无功器件,对滤波和带宽容差的影响最大,本文的直流分析里同样没有考虑这一点
2018-11-01 11:36:23
的疑问时,了解它们仍然是有用的。MATLAB"fdatool"命令可启动滤波器分析和设计软件包,帮助设计和分析系统FIR滤波器实施。惯性频率响应测试方法在陀螺仪中测试频率响应的最直接
2019-12-30 08:00:00
的监控、陀螺仪运行状态分析等,建立陀螺仪寿命预测模型和可靠性评估方法,以期研究出基于部分寿命周期(如10%)试验数据的陀螺仪可靠性评估方法。为此,结合有关课题,以动力调谐陀螺仪为例,研制陀螺仪寿命试验测试
2019-06-04 06:37:56
MEMS的工作原理和建模机制。典型MEMS传感器的检测部分行为就像是一个二阶集总式质量块(阻尼器)弹簧机械系统,具有单一的谐振频率,其传递函数如下: 其中Fin(s)是输入的力(在使用陀螺仪时是科里奥利力
2018-12-05 15:12:05
一种AMR磁罗盘的误差建模与校准方法
2016-08-17 12:10:13
已经有很多大佬介绍过了MPU6050的协议、数据处理方式、滤波算法,所以这部分就不再复述了,本篇主要是针对看不懂长篇大论的小白的简易上手的方法。首先呢还是得简单介绍下什么是陀螺仪:MPU-60X0
2022-02-10 07:24:32
MEMS陀螺仪提供了测量旋转角速度的一种简单方法,其封装很容易连接印刷电路板,因此被广泛用于许多不同类型的运动控制系统中作为反馈检测元件。在这种类型的功能中,角速度信号(MEMS陀螺仪输出)中的噪声
2017-08-12 15:38:23
。关键词:FIR,DSP,数字滤波器中图分类号:TN7131. 引言数字滤波器在数字通信、语音图象处理、谱分析、模式识别、自动控制等领域得到了广泛的应用。相对于模拟滤波器,数字滤波器没有漂移,能够处理低频
2008-05-14 23:30:12
利用高通滤波来消除积分过程中的偏置误差。图3. 角向随机游动 (ADIS16460)。回过头看图2中的应用示例,将公式1和公式2结合便可把重要标准(检查表面上的物理失真)与MEMS陀螺仪数据手册通常会
2018-10-18 11:22:22
基于MEMS的加速度计设备是如何工作的?基于MEMS的陀螺仪设备是如何工作的?
2021-11-12 06:59:40
MEMS陀螺仪信号中的常见噪声源评估MEMS陀螺仪信号中常见噪声源的简单流程
2021-03-08 06:17:12
什么影响了运动控制系统的关键性能标准?采用MEMS陀螺仪的低噪声反馈控制设计
2021-03-11 07:01:52
中,一般是基于萨格纳克(Sagnac)效应的陀螺。实际上,这几种传感器更准确的叫法应该是:角速度传感器。但由于各种原因,现在一般都叫陀螺仪。结合成本和测量方法,一般选用 MEMS 陀螺仪。获取旋转
2018-10-24 10:23:31
集成正交安装的高精度MEMS陀螺仪和正交安装的高精度MEMS加速度计,内置全温零位误差补偿、安装正交误差补偿、非线性误差补偿和g值敏感误差补偿等多种校准算法,采用双排14针插针通过UART TTL通讯
2024-01-18 13:46:16
数学建模方法及其应用 韩中庚系统的分析了数学建模的方法
2013-09-05 15:15:10
本文基于某车型门窗控制器(DCM:Door Control Module)的PCBA提出一种有限元分析中PCBA的简化建模方法,并进行有限元仿真模态分析。通过仿真模态分析结果与试验模态分析结果对比,验证所提出的简化建模方法计算结果的准确性。
2021-04-19 06:20:44
了新的要求如高精度、高采样频率等。为使MEMS陀螺能在高频率下工作,数字化电路就需要具备高采样频率,而目前MEMS陀螺的数字化主要是通过采用嵌入式现场可编程门陈列(FPGA)、数字信号处理器(DSP
2018-11-08 16:22:22
的疑问时,了解它们仍然是有用的。MATLAB"fdatool"命令可启动滤波器分析和设计软件包,帮助设计和分析系统FIR滤波器实施。惯性频率响应测试方法在陀螺仪中测试频率响应的最直接
2018-10-17 09:54:54
振。 本文介绍了MEMS惯性传感器(例如陀螺仪和加速计)如何帮助人或机器克服空间定向障碍。文章介绍了外力和运动对系统工作的影响,以及元件布局和安装条件(空间关系)对MEMS惯性传感器性能的直接影响。系统配置
2018-11-12 15:38:15
MEMS陀螺仪是如何工作的?
2021-03-18 06:48:50
论述了微机电系统(MEMS)器件缩减模型的建立是进行MEMS系统级模拟的关键。论证了基于线性正交振型建立MEMS器件缩减模型是一种有效的方法,导出了MEMS器件动态缩减模型的微分方
2009-05-28 11:19:06 17
17 MEMS单轴陀螺仪芯片利用作用在旋转物体上的科里奥利力。高Q值和相对灵敏度的压电单晶通过采用,虽然体积小,但在振动型中实现了最高的输入/输出灵敏度比。
2022-11-21 13:24:32
各种随机噪声是激光陀螺误差的主要来源;设计了基于激光陀螺漂移数据时间序列模型的卡尔曼滤波器,对激光陀螺漂移数据进行了滤波,并采用Allan方差法分析了滤波结果;结果表
2009-07-07 15:13:5032 惯性器件误差补偿技术对提高捷联惯导系统的导航精度具有十分重要的意义,而误差补偿的关键在于误差模型的辨识。本文探讨将Elman 神经网络应用于惯性器件误差建模中,详细介
2009-07-09 15:34:597 共声学极点/零点(CAPZ)逼近是头相关传递函数(HRTF)建模的一种高效方法,与极零点模型相比,它可以用更少的参数表示HRTF。传统的CAPZ 模型参数估计方法是基于最小均方误差准则,而
2009-11-24 15:33:5815 本文介绍了一个自由转子陀螺的漂移误差模型识别系统。该系统在实现数据采集的基础上采用扩展卡尔曼滤波算法进行模型参数的识别,在扩展卡尔曼滤波计算中采用了改进的格
2009-12-19 14:59:088 有源滤波器中数字低通滤波器的设计及其DSP实现摘要:介绍了基于瞬时无功功率理论的ip iq 谐波检测方法及对低通滤波器的要求,分析讨论了数字低通滤波器的类
2010-05-13 17:19:1890 ST mems陀螺仪
基于ST专有的MEMS技术的优势和世界
2008-09-23 10:41:202137 中国自己的MEMS陀螺仪诞生
深迪半导体,日前发布了旗下第一款陀螺仪产品-- SSZ030CG,这标志着第一款具有中国自主知识产权的商用 MEMS (微机电)陀螺仪诞生。
2009-12-07 09:05:401337 陀螺仪能够测量沿一个轴或几个轴运动的角速度,而MEMS加速计则能测量线性加速度,因此这两者是一对理想的互补技术。事实上,如果组合使用加速计和陀螺仪这两种传感器
2010-12-16 09:03:131080 光纤陀螺 漂移具有弱非线性和弱时变的特点。为了更准确的描述这种特性,介绍了非平稳时间序列的DDS建模方法,并对光纤陀螺随机误差进行建模。通过对建模结果的脉冲响应分析,表
2011-06-08 15:25:1525 基于可重用IP(Intellectual Property)的设计方法为微机电系统( MEMS )系统级建模与仿真技术提供了新的思路,有望成为未来的主流。它将MEMS分解为梁、质量块、可变电容器等多个功能结构部件
2011-08-23 16:07:140 介绍了基于DSP技术的开环光纤陀螺。开环光纤陀螺以效应为基础, 是一种新型的全固态陀螺仪, 由于其具有潜在的良好的性价比, 与数字信号处理芯片DSP接口简单等优点而倍受青睐, 一经
2011-09-13 14:27:5841 针对在陀螺控制过程中陀螺基准信号频率和相位角测量不准确,从而导致陀螺控制过程中定位不准确,产生漂移的难题,研究了一种基于DSP + FPGA 的陀螺控制方法。利用FPGA 进行基准信号频率
2011-09-13 14:30:1129 为了抑制动力调谐陀螺的随机漂移, 采取时间序列分析的方法, 分析了扔小型动力调谐陀螺仪输出数据的平稳性,建立了其随机漂移的自回归求和滑动平均, 模型。以所建模型作为状态方程
2011-09-13 17:14:3431 针对卫星定位信息误差形成的原因和组成,分析了几何精度因子在误差形成中的影响,在对误差分析的基础上提出了一种误差处理的数学模型,采用卡尔曼滤波的方法对误差进行处理。实验
2011-11-04 11:25:0271 深迪半导体(上海)有限公司正式发布其首款三轴微机电(MEMS)陀螺仪产品,ST200G
2012-06-06 18:07:441447 MEMS陀螺正交误差分析理论及分析,适用于初学者学习
2015-12-08 09:53:111 本文针对提高低精度微陀螺精度的问题展开研究,基于陀螺阵列的虚拟陀螺技术,利用滤波补偿算法,将多个具有相似特性的低精度陀螺组成陀螺阵列,提出改进的卡尔曼滤波算法将多个陀螺的输出进行数据融合,构成虚拟
2015-12-28 09:56:144 MEMS微陀螺研究与发展述评,有需要的下来看看。
2016-12-17 16:37:587 基于DSP的MEMS陀螺去噪算法研究,下来看看。
2016-12-17 16:33:397 基于磁强计和MEMS陀螺的弹箭全姿态探测
2016-12-17 16:33:3910 基于随机平均法的MEMS陀螺自适应控制设计
2016-12-17 16:33:399 Sagnac式光纤电流互感器的光波偏振特性建模及误差特性分析_孙健
2016-12-31 14:45:090 MEMS加速度计的温度误差建模及补偿_秦丽
2017-01-12 18:09:582 基于滤波的SAR影像去噪方法分析_贾伟洁
2017-03-16 10:57:060 基于ARMA模型和狼群算法的陀螺随机漂移建模研究_来凌红
2017-03-19 19:07:173 基于九轴MEMS定位系统误差分析与补偿算法研究_张港
2017-03-19 19:28:034 详细介绍了陀螺零漂的方法
2017-10-14 09:27:3210 光纤陀螺信号处理电路中FPGA与DSP的接口方法研究
2017-10-20 08:40:252 是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。 本文选用TI公司的TMS320VC33作为MEMS陀螺仪信号处理平台的核心芯片,同时引入DSP/BIOS实时操作系统提供的多任务处理机制,在对陀螺仪信号进行数据采集的间隙同时对先采集来的信号数据进行处理
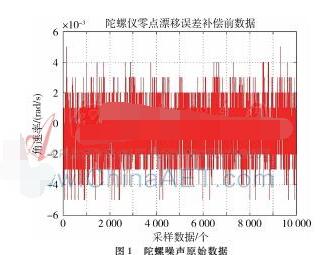
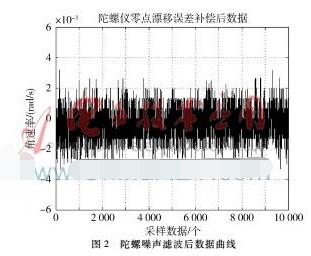
2017-10-26 15:27:059 ,而这些漂移量是非线性、非稳定的,使得测量数据中存在较大误差。 常用的陀螺仪信号降噪方法有卡尔曼滤波、短时傅里叶变换、小波变换等。其中,卡尔曼滤波是基于建立线性模型,然而线性模型对于非稳定、非线性漂移信号并不是很有
2017-11-01 09:43:544 、等导航系统中具有广泛应用。由于目前微惯性器件的精度相对较低,因此其标定、误差建模与补偿研究对于提高其精度至关重要。 陀螺是敏感壳体相对惯性空间做角运动的装置,陀螺仪即是能白主地测量物体角速度或角位移的器件。陀螺仪类型
2017-11-05 11:25:145 三轴陀螺仪也叫“微机械陀螺仪”,而“微机械陀螺仪”也可称作“MEMS陀螺仪”,即同时测定6个方向的位置,移动轨迹,加速。
2017-12-01 16:17:2314565 
MEMS陀螺仪对微机械加工工艺具有高度的敏感性,加工工艺偏差、加工应力以及可靠性等对MEMS陀螺仪的成品率至关重要。整个微机械加工工艺流程是实现MEMS陀螺仪长期稳定工作的基础,因此必须加强微机械加工工艺过程的控制。
2018-06-13 15:14:001608 MEMS陀螺仪信号的处理平台的硬件系统应该包括以下几个部分:DSP模块,数据采集模块,上位机通信模块和JTAG调试接口模块。数据采集模块由两部分组成:6路16位模/数转换器ADS8364和同步时序
2018-04-12 12:10:002001 
进行滑动扣除均值方法来抑制直流分量,利用滑动滤波算法抑制加速度计高频噪声,引入互补滤波算法将预处理后的陀螺仪和加速度计信号进行融合,得到更加准确稳定的角度测量值,分析了融合算法中加权因子与滤波频率特征之间的关系。
2018-03-29 14:07:004286 
光纤陀螺仪(FOG)以前曾经是环形激光陀螺仪(RLG)等其他技术的低成本替代品,现在该技术面临着新的竞争。微机电系统(MEMS)陀螺仪开始抢夺传统FOG应用的市场份额。具体来说,天线阵列稳定、农业机械控制、常规车辆导航成为MEMS和FOG对峙的战场。
2018-02-24 17:24:278463 
单轴硅微MEMS角速率陀螺PA-ARG系列 1. 单轴硅微MEMS角速率陀螺PA-ARG 简介 : PA-ARG系列角速率传感器(陀螺),由西安精准测控自行研制,是用来测量角速率的无旋转马达的固态
2018-04-03 10:33:583305 
本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。
2018-06-03 01:47:003404 MEMS陀螺仪也称电子式陀螺仪,就是一块芯片。 Iphone 4上的陀螺仪就是这种,主要作用是在GPS没有信号时,通过陀螺仪的作用仍然能够继续精确导航。
2018-07-30 11:21:3512905 轴对此漂移最为敏感。俯仰(姿态)和滚动轴的相当一部分陀螺仪漂移可以在IMU内部予以消除,即利用加速度计的反馈结果监控相对于重力的位置。在IMU内部利用低通或卡尔曼滤波器对陀螺仪输出进行滤波,也是广泛采用的消除部分漂移误差的方法。
2018-09-07 14:20:276339 但是MEMS陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事。MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力。下面是导出科里奥利力的方法。有力学知识的读者应该不难理解。
2019-03-08 14:47:285260 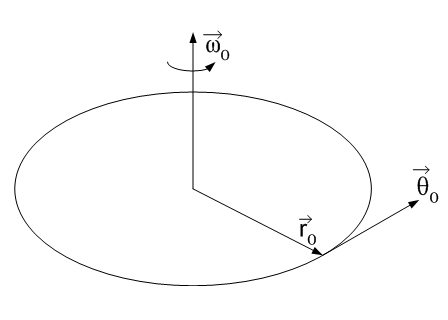
MEMS 陀螺仪的基本工作原理是通过科里奥利力来实现的,演示文稿中利用生动的动画讲述了这一原理,并介绍了为什么工业级的陀螺仪要采用差分甚至是四核的设计结构。当然,MEMS 陀螺仪的设计架构中还用到了MEMS加速度计的基本设计单元。
2019-07-31 06:18:004029 本陀螺仪演示视频介绍2个ADI MEMS陀螺仪(ADXRS800、ADXRS450)和2个同类陀螺仪产品。可以看到每个陀螺仪对施加的旋转速率所做出的响应。同时还展示了ADI公司陀螺仪出色的冲击和振动抑制性能。
2019-07-16 06:15:002584 本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。
2019-07-16 06:12:002668 本文主要围绕嵌套环MEMS陀螺的关键技术展开调研,分析讨论了国内外主要研究机构在嵌套环MEMS陀螺关键技术上的研究思路和进展,为后续嵌套环MEMS陀螺的研究提供参考和借鉴。
2019-11-30 07:42:007474 
体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-04-16 15:10:422253 体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-06-08 17:01:251624 近日,扬州大学机械工程学院副教授梁峰带领的科研团队对“MEMS陀螺仪的动力学特性”进行了深入分析,研究发现采用压电薄膜,可大大提高陀螺仪的灵敏度。
2020-08-12 15:38:331960 以四元数为基础的扩展卡尔曼滤波 (EKF)来进行传感器信息融合;利用陀螺仪测得的角速度更新四元数,使用 GPS信息所计算的伪姿态来更新滤波器的测量值;仿真结果表明所提出的方法即使在陀螺仪漂移和伪姿态包含噪声的情况下,也拥有较好的长期和短期精
2021-01-05 08:00:004 是个非常重要而且必须面对的问题。针对闭环消偏光纤陀螺信号处理中既要实现对快速A仍采样数据进行滤波,同时又能保证光纤陀螺能够实现闭环控制以及具有一定的带宽,以光纤陀螺(FoG)信号滤波处理电路中FPGA和DSP的接口问题为例,探讨了三种不同的接口方案的设计思路、优缺点及其适用情况,考虑到光纤陀螺信号处理及其滤波
2021-02-01 11:53:2912 DSP技术在电度表中的应用进行了研究,对电度表系统的误差进行了分析,提出了采用软件方法来补偿误差的措施,使电度表的精度达到了设计要求,又避免了利用硬件进行误差补偿所带来的弊端,不用在线路中调整电压、电流采样值,有利于生产。
2021-04-11 11:35:085 机床热误差严重影响机床的加工精度,必须对其加以控制,在研究机床的热误差时,首先需要明确机床的热特性,该工作可以为后续热误差建模提供模型输入值。主要综述了机床热误差的来源、机床温度场的获取方法、温度
2021-04-16 09:52:3828 MEMS陀螺仪姿态算法研究综述
2021-05-26 14:24:1439 一种简易的MEMS陀螺仪标定方法
2021-06-11 14:31:0016 MEMS陀螺捷联惯导系统标定方法综述
2021-08-05 16:54:135 Mark Marshall博士将探讨这款MEMS陀螺仪的工作原理,并详细介绍其性能规格和Pinpoint结构,包括MEMS振动环的设计与制造。
2023-03-20 09:43:47846 Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:472085 摘要:MEMS(微机电系统)陀螺仪在惯性导航、姿态控制和运动测量等领域中具有重要应用。然而,传统MEMS陀螺仪在尺寸和性能方面存在一定的限制。本文介绍了一种基于陶瓷基板的技术芯片实现了小型化MEMS
2023-07-10 15:03:37369 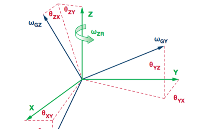
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:222309 
MEMS加速度计与MEMS陀螺仪是现代惯性导航系统中最常用的传感器。
2024-02-17 14:05:00345 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论