 电子发烧友App
电子发烧友App


人体运动分析是指通过一定的方法对人的运动进行捕捉和记录,用于定量描述、分析和评价人的运动的一门学科。人体运动分析主要是使用运动捕捉系统实现运动跟踪和行为识别两大主要任务,其中惯性式运动捕捉系统主要采用MEMS 传感器 。
MEMS传感器作为一种采用微电子和微机械加工技术制造出来的新型传感器,具有微型化、集成化、智能化、成本低、效能高、可大批量生产等特点,在惯性式运动捕捉技术中发挥了重要作用。
惯性式运动捕捉系统中 测量 人体运动的惯性传感器,也称之为 运动传感器 ,捕捉和识别 身体不同部位的运动状态,可以布置在头部、上肢、下肢、手部等多个部位。惯性传感器主要包括加速度计、 陀螺仪 、磁力计,在实际应用中,采集的传感数据需经过校准、误差检测和补偿、数据融合后,用于分析和跟踪人体运动。
运动传感器原理
1.MEMS加速度计原理
MEMS加速度计分为三种:压电式、容感式、热感式。压电式MEMS加速度计运用的是压电效应,在其内部有一个刚体支撑的质量块,有运动的情况下质量块会产生压力,刚体产生应变,把加速度转变成电信号输出。容感式MEMS加速度计内部也存在一个质量块,从单个单元来看,它是标准的平板 电容器 。加速度的变化带动活动质量块的移动从而改变平板 电容 两极的间距和正对面积,通过测量电容变化量来计算加速度。热感式MEMS加速度计内部没有任何质量块,它的中央有一个加热体,周边是 温度传感器 ,里面是密闭的气腔,工作时在加热体的作用下,气体在内部形成一个热气团,热气团的比重和周围的冷气是有差异的,通过惯性热气团的移动形成的热场变化让 感应器 感应到加速度值。
由于压电式MEMS加速度计内部有刚体支撑的存在,通常情况下,压电式MEMS加速度计只能感应到“动态”加速度,而不能感应到“静态”加速度,也就是我们所说的重力加速度。而容感式和热感式既能感应“动态”加速度,又能感应“静态”加速度。
2.MEMS陀螺仪原理
MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力。实际的MEMS陀螺仪的设计如下图。如果物体在圆盘上没有径向运动,科里奥利力就不会产生。因此,在MEMS陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90度。
MEMS陀螺仪通常有两个方向的可移动电容板。径向的电容板加震荡电压迫使物体作径向运动,横向的电容板测量由于横向科里奥利运动带来的电容变化。因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。
3.MEMS磁力计工作原理
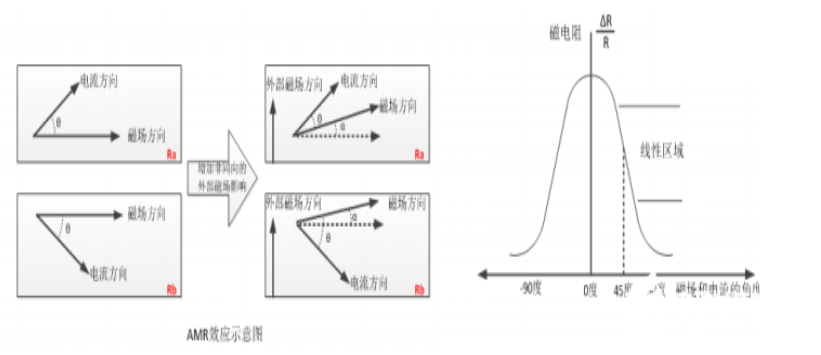
MEMS磁力计就是通过测量磁场强度和方向来定位设备的方位的传感器。 磁传感器 就是感应环境磁场的变化,并把它转换为电信号,从而测量出对应物理量的器件,主要应用在电子罗盘、磁场感应器、位置感应器等方案中。磁场的测量可以利用霍尔效应、磁阻效应、 电磁感应 效应等原理。根据不同的原理可以制成多种MEMS磁力计。磁传感器广泛采用AMR材料(AnisotropicMagneto-Resistance),如铁、钴、镍及其合金等,指当外部磁场与磁体内建磁场方向成零度角时, 电阻 是不会随着外加磁场强度变化而发生改变的,但当外部磁场与磁体的内建磁场有一定角度的时候,磁体内部磁化矢量会偏移,从而磁场方向和 电流 方向也会随之变化,导致电阻阻值也将发生变化。
从下图中可知,当电流方向和磁体内磁化方向成45度角度时,外部磁场给磁阻所引起的电阻变化呈现出的是线性关系,所以磁传感器在没有外部磁力影响时候的初始角度设定为45度,利用这个线性关系再通过惠斯通 电桥 即可得到外界磁场值。
人体运动系统分类应用
人体运动系统的应用范围较广,根据其研究分析的主体,主要划分为全身运动分析系统和专用运动分析系统。
全身运动分析系统是指在人体全身各主要部位的关键点布置运动传感器,捕捉分析人体各部位姿态和位置信息。常见的全身运动分析系统有荷兰XSens科技公司的XSensMVN系统,英国Animazoo捕捉系统、北京孚心科技的FOHEART Leo动作捕捉套装。
1)XSensMVN:
XSensMVN套装是XSens的一个重要产品,MVN惯性动作捕捉系统,如下图所示,以独特的微型惯性运动传输传感器(MTx)和无线Xbus 系统为基础,结合了符合生物力学设计的高效传感器等Xsens最新科技,能够实时捕捉人体6自由度的惯性运动,同时将数据通过无线网络传输到 计算机 或笔记本电脑中,实时记录和查看动态捕捉效果。另外,该系统最独特之处在于无需外部照相机和发射器等装置,避免了多余的数据传输线或电源线对使用者的行动限制。MVN套装,己经进入了电影制作和电子游戏产业,可以不受环境光线与空间距离的限制,纯净的动作捕捉数据不需要进行后处理即可录制完成,非常适用于各种实时的表演应用。XSens 的产品主要针对多个应用领域,如,动画、医学、体育科学等。
2)Animazoo:
Animazoo是一个面向开发人员的、动画驱动的动作捕捉的软硬件系统。它针对不同的应用领域提供定制的运动捕捉解决方案,价格和性能也因应用领域和方式而各不相同。AnimazooIGS-190-M物理惯性动作捕捉系统安装简单,小巧易存,且适合于户外应用环境。除了这些与其它惯性系统类似的特点外,AnimazooIGS-190-M与其它物理惯性动作捕捉系统的最大区别在于其能够与硬件同步,可以对模特髋部进行跟踪并提供整体定位数据(6自由度),这些功能都是普通惯性系统所缺少的。Animazoo公司开发的超声波跟踪系统为声纳三角测量装置,与“AnimazooIGS-190-M物理惯性动作捕捉”连接后,可将AnimazooIGS-190-M升级为“IGS-190-H物理惯性动作捕捉”。声纳装置发射的定位数据在电视直播、多演员表演中,尤其是可作为指南,对后期制作的 光学 性能数据进行清洁,消除模糊不清有着重要作用。
3)FOHEARTLeo动作捕捉套装:
FOHEARTLeo是北京孚心科技的一款产品,包含33个节点覆盖全身,其中手部和手臂可以连接hub单独进行使用,用于捕捉手臂及手指的动作数据,如下图所示。其中,手部节点尺寸约12mm,10个节点可全方位覆盖手部的活动节点,捕捉较为精准。
专用运动分析系统通常只包含几个运动传感器,安装在人体特定的某些身体部位,如头部、手臂、下肢等,监测相应的运动特征和状态,可以将其主要划分为上半身和下半身的运动分析。
1)上半身运动分析:
上半身运动分析主要是针对使用者的头部,双臂,手部等部位进行运动捕捉和监测。通过运动传感器追踪头部运动,获取虚拟现实(AR/ VR )和远程操作那个中所需的头部信息;将多个惯性传感器安置在双臂,捕捉双臂运动姿态,可用于运动训练中的矫正和监测;数据手套可用于检测手指弯曲,利用磁定位传感器来精确地定位出手在三维空间中的位置,可进行虚拟场景中物体的抓取、移动、旋转等动作,为虚拟现实系统提供了一种全新的交互手段;腰部的运动传感器可以实现对人的重心的监测,可应用于跌倒检测。
2)下半身运动分析:
下半身运动分析主要是针对使用者的骨盆、大腿、小腿和脚部等部位进行运动捕捉和分析。将运动传感器绑在小腿上,利用运动算法可以估算行走速度;足部的运动传感器可以实现对行走过程中的步态参数进行监测。除了单一种类传感器的运用,惯性传感器可结合压 力传感器 、超声波传感器、反馈装置等,测量步长、抬脚高度、步宽、足部轨迹等,并获取相应的反馈,用于步态分析。
运动传感器数据处理和融合
对惯性传感器的应用包括初始校准、数据处理和融合等。MEMS加速度计可以测量载体在三轴方向上的加速度,并可计算相应的速度,其在静态时测量精度较高,在动态运动中存在线性加速度的干扰。MEMS陀螺仪可测量高速转动下的转动角速度,进一步运算可得角度信息,其拥有良好的动态响应性,但是随着时间的累积,会产生累积误差,发生漂移。三轴磁力计通过感应当地的磁场通量计算载体方位姿态,所在地球磁场恒定不变时,磁力计在静态下有良好的测量特性,不易随时间发生漂移,但是室内环境中磁力计容易受到铁磁扰动。因此,为获得人体位姿估计的结果,须解决两个关键问题:1)对传感器的误差进行补偿和校正;2)采用合适的算法融合各传感器数据。
1.传感器误差
从加速度计、陀螺仪、磁力计的角度出发,传感器误差的来源主要是随机漂移、线性加速度干扰和磁力计扰动。
(1)随机漂移
随机漂移主要来源于加速度计和陀螺仪,可以将随机漂移进行相应的建模,使用卡尔曼滤波器 等进行在线估计,从而实时补偿该随机漂移。
(2)线性加速度
在跟踪人体运动时,加速度计通常处于动态环境中,当人体运动的加速度相对于重力加速度无法忽略时,此时根据加速度计测量值计算出的俯仰角和横滚角会与真实值存在较大的误差,如果不对线性加速度计加以补偿,就会引起动态精度的下降。为解决该类问题,可以将线性加速度扩张成系统的状态变量,通过各种滤波方法进行估计,一方面可以对线性加速度分量和重力加速度分量进行处理,另一方面根据线性加速度的大小自适应调整加速度计量测噪声方差的大小。
(3)磁力计扰动
当周围存在磁场干扰时,特别是在室内环境中磁力计的测量精度会受到很大的影响。磁场干扰可分为硬铁干扰和软铁干扰。硬铁干扰产生于永久磁铁,这些干扰源的大小及与磁力计的相对位置固定,一般假设不变,可做零偏处理。软铁干扰来自于磁力计附近的其余磁性材料的影响,软铁干扰一般是时变的扰动。针对时变扰动,可以采用基于阈值的方法或者基于模型的方法。
2.数据融合
人体运动跟踪通过对信息的采集、坐标系的变换,得到人体位姿估计的结果。然而,单个传感器由于受到噪声干扰等影响,往往导致姿态跟踪精度较低。因此,多传感器信息融 合成 为提高姿态跟踪精度的良好途径。人体运动跟踪中最常采用的数据融合方法是互补滤波器和卡尔曼滤波器。随着微型芯片计算能力的提高,粒子滤波等数据融合方法也逐渐被用于在线估计人体的姿态。
(1)互补滤波
加速度计和磁力计容易受到高频噪声的干扰,陀螺仪容易受到随机漂移等低频噪声的干扰,互补滤波器就是将加速度计和磁力计测量的静态姿态通过低通滤波器去除高频分量,将陀螺仪测量的动态姿态通过 高通 滤波器去除低频分量,从而实现姿态信息的融合估计。
(2)卡尔曼滤波
卡尔曼滤波包括线性卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波等。下图所示为卡尔曼滤波过程解析图。卡尔曼滤波的核心过程可以划分为两个部分:时间更新,即对下一步的状态变量进行预测;测量更新,即根据测量值对预测值进行一定的修正,得到估算值。通过设计不同的状态变量和观测量,可以衍生出各种具有不同特点的姿态算法。

(3)粒子滤波
粒子滤波算法的核心思想是利用一系列随机样本的加权和近似后验概率密度函数,通过求和来近似积分操作。该算法源于蒙特卡洛思想,即以某事件出现的频率来表示该事件的概率。因此在滤波过程中,需要用到概率的地方,对变量采样,以大量采样及其相应的权值来近似表示概率密度函数。
基于惯性传感器的人体运动分析技术,借助穿戴在身体各部位的MEMS传感器,通过数据处理、融合和姿态解算方法可实时跟踪分析人体运动姿态,其在康复治疗、影视制作、体育训练等领域得到了广泛应用,未来在开展基于惯性传感器的人体运动分析时,传感器和算法依旧是研究的重点。
责任编辑人:CC














 工商网监
工商网监
评论