 电子发烧友App
电子发烧友App


MEMS压力传感器,顾名思义是测量压力的。
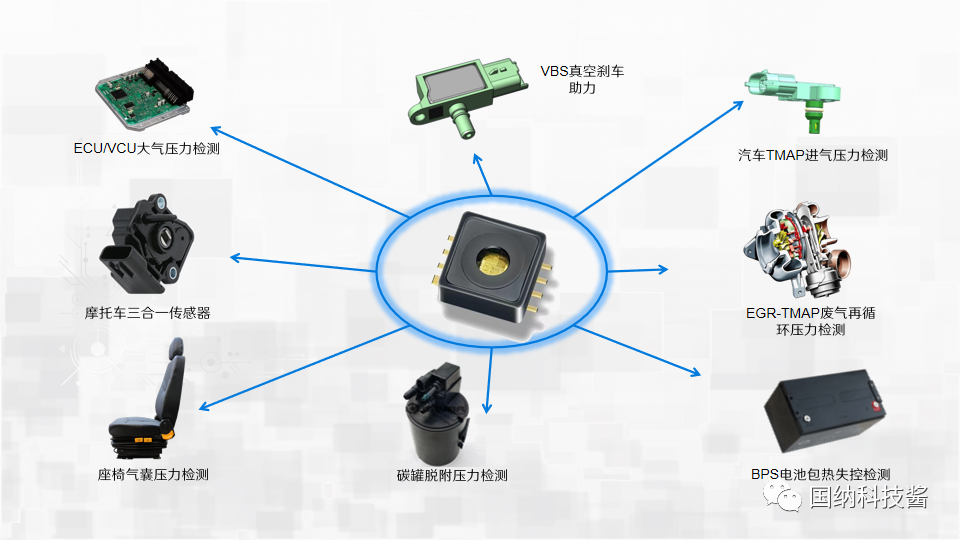
涉及到压力测量,提到最多的应用场景就是胎压测量,也就是测量轮胎充气程度。
近几年,智能手机中的压力传感器也逐渐成为标配,主要用来测量大气压力。测量大气压的目的,是为了通过不同高度的气压,来计算海拔高度,同GPS定位信号配合,实现更为精确的三维定位,对户外徒步登山爱好者是一个非常友好的用途。
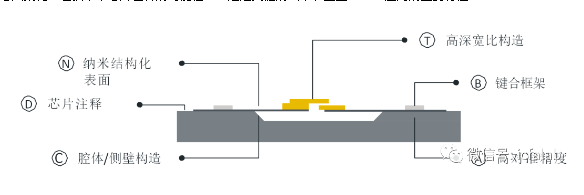
MEMS压力传感器的原理也非常简单,核心结构就是一层薄膜元件,受到压力时变形,形变会导致材料的电性能(电阻、电容)改变。因此可以利用压阻型应变仪来测量这种形变,进而计算受到的压力。
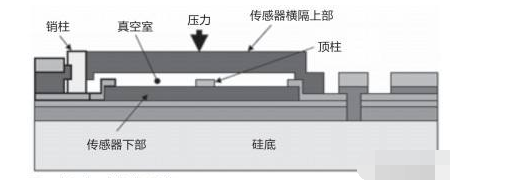
本图例展示的是电容式MEMS压力传感器原理,当受到压力时,上下两个横隔(传感器横隔上部、传感器下部)之间的间距变化,导致隔板之间的电容变化,据此可以测算出压力大小。
(2)MEMS加速度传感器
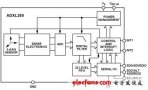
MEMS加速度传感器,顾名思义,是一种能够测量加速度的MEMS器件。
加速度传感器最核心的应用,是利用加速度来感测运动和震动,比如消费电子中最广泛的体感检测,广泛应用于游戏控制、手柄振动和摇晃、姿态识别等等。
MEMS加速度传感器的原理非常易于理解,那就是高中物理最基础的牛顿第二定律。力是产生加速度的原因,加速度的大小与外力成正比,与物体质量成反比:F=ma。
所以MEMS加速度传感器本质上也是一种压力传感器,要计算加速度,本质上也是计算由于状态的改变,产生的惯性力,常见的加速度传感器包括压阻式,电容式,压电式,谐振式等。
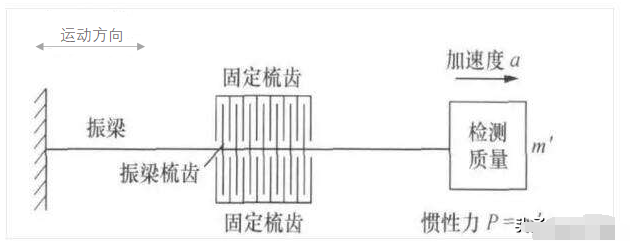
以谐振式加速度计为例,原理类似于绷紧的吉他弦,由于绷紧程度不同,弹奏出的声音频率也不同。在谐振式加速度计中,连结“检测质量块”的振梁就充当了吉他弦的角色,当质量块受惯性力产生加速度时,振梁的紧绷程度也会不同,此时对振梁施加一定的震动,并对振梁梳齿进行震动频率检测,进而计算加速度。
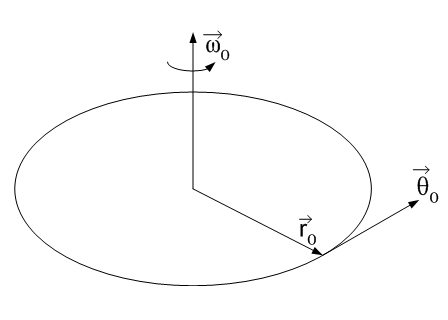
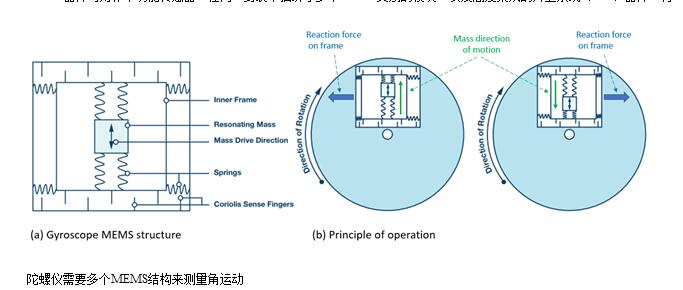
(3)MEMS陀螺仪(角速度传感器)
陀螺仪相对来说复杂一点,是一种测量角速度的器件,我们先来介绍一下普通的陀螺仪。
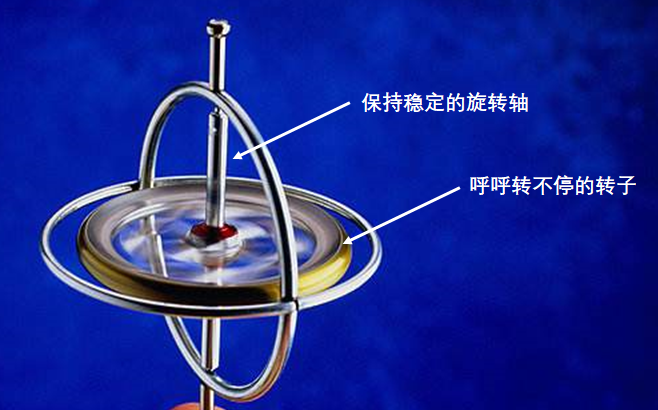
要测量角速度,不是一件容易的事情,必须在运动的物体中,寻找到一个静止不动的锚定物——这个锚定物就是陀螺。利用的属性就是高速旋转中的陀螺,角动量很大,旋转轴不随外界运动状态改变而改变,会一直稳定指向一个方向。
动物界中稳定性最好的就是鸡了,所以很多人开玩笑说,鸡的脑袋里肯定装了一个先进的陀螺仪,不管怎么动它,脑袋就是不动。
至于陀螺仪的结构,核心就是一个呼呼转不停的转子,作为其他运动物体的静止锚定物。
再回到MEMS陀螺仪,与传统的陀螺仪工作原理有差异,因为“微雕”技术在硅片衬底上加工出一个可转动的立体转子,并不是一件容易的事。
MEMS陀螺仪陀螺仪利用科里奥利力原理——旋转物体在有径向运动时所受到的切向力。这种力超出了笔者的高中物理水平,怎么描述这种科里奥利力呢?可以想象一下游乐场的旋转魔盘,人在旋转轴附近最稳定,但当大圆盘转速增加时,人就会自动滑向盘边缘,仿佛被一个力推着一样向沿着圆盘落后的方向渐渐加速,这个力就是科里奥利力。
就当他是一种特殊的“奥利给”吧。
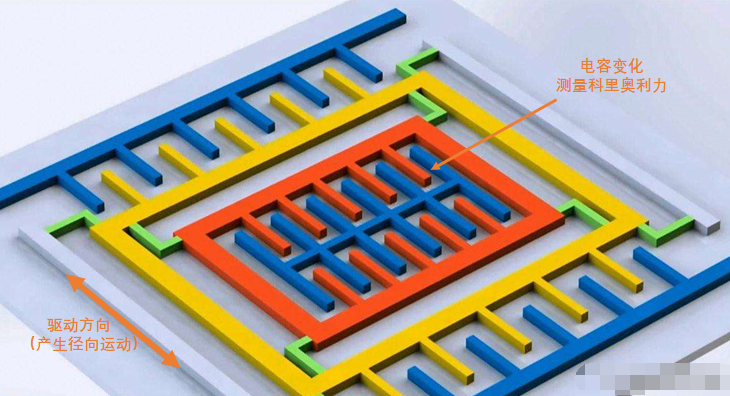
所以MEMS陀螺仪的结构,就是一个在圆盘上的物体块,被驱动,不停地来回做径向运动或者震荡。由于在旋转状态中做径向运动,因此就会产生科里奥利力。MEMS陀螺仪通常是用两个方向的可移动电容板,通过电容变化来测量科里奥利力。
(4)MEMS惯性组合传感器
惯性组合传感器,不是一个新的器件,而是由加速度传感器、陀螺仪、磁传感器等组合而成,比如三轴、六轴、九轴等,主要实现全方位、立体运动检测。
惯性传感器的一个被广为熟悉的应用领域就是惯性导航,比如飞机/导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GPS导航等制导应用。
(5)MEMS微流控系统
前面讲到的压力传感器、加速度、陀螺仪等,属于传感器的范畴,而微流控系统(microfluidics ),则属于执行器。
所谓微流控,是流量控制,是一种精确控制和操控液体流动的装置,使用几十到几百微米尺度的管道,一般针对微量流体,用于生物医药诊断领域的高精度和高敏感度的分离和检测,具有样品消耗少、检测速度快、操作简便、多功能集成、体小和便于携带等优点。
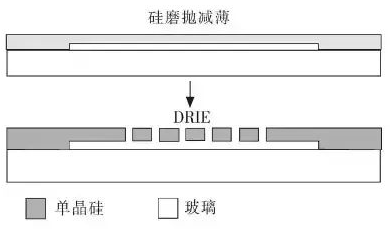
MEMS微流控是纯粹的机械结构,制作微流控芯片的主要材料包括硅、玻璃、石英、高聚物、陶瓷、纸等。
(6)射频MEMS(含FBAR)
射频是一个和大家息息相关的领域,只要涉及到无线通信(2345G、Wi-Fi、蓝牙……),就要利用射频技术。
因为射频中核心部件之一是功率放大PA(硅、砷化镓、氮化镓器件),因此很多人默认为射频器件属于半导体集成电路领域。
但实际上,整个射频前端(RFFE)中,MEMS器件占主要比例,包括射频开关(Switch)、滤波器(SAW、BAW、FBAR等)、振荡器/谐振器(Oscillator/Resonator)等。
射频开关(Switch),并不是一个单纯的开关,而是一个切换器,主要用于在射频设备中对不同方向(接收或发射)、不同频率的信号进行切换处理的装置,实现通道的复用。
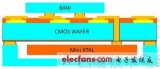
滤波器(SAW、BAW、FBAR等),负责接收通道的射频信号滤波,将接收的多种射频信号中特定频率的信号输出,将其他频率信号滤除。以SAW声表面波为例,通过电磁信号-声波-电磁信号的两次转换,将不受欢迎的频率信号滤除。
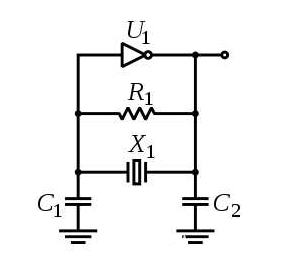
振荡器/谐振器(Oscillator/Resonator),振荡器是将直流电能转变成交流电能的过程,用来产生一定频率的交流信号,属于有源器件。谐振器是电路对一定频率的信号进行谐振,主要是用来筛选出某一频率,属于无源器件。
石英晶体振荡器是利用石英晶体的压电效应制成的一种谐振器件,基本构成是从一块石英晶体上按一定方位角切下薄片,在它的两个对应面上涂敷银层作为电极。
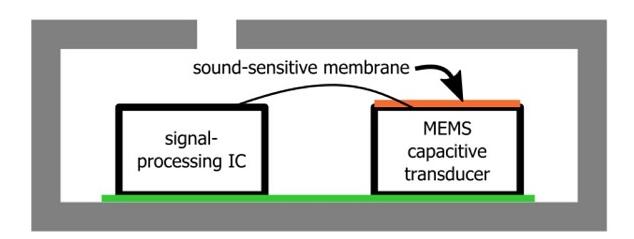
(7)MEMS硅麦克风
麦克风大家都知道,快手上的“喊麦”就是指的麦克风,对着麦克风歇斯底里的一种亚文化。
而硅麦克风指的是利用MEMS技术,在硅基上制造的微缩麦克风,迎合目前3C产品小型化和集成化趋势,所以TWS耳机、手机麦克风,才会实现如此集成化效果。
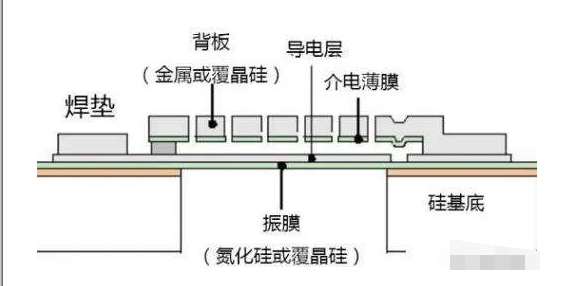
麦克风原理,不管是传统的驻极体麦克风(electret microphone),还是目前微型化的硅麦,都是利用的声电转换。
驻极体麦克风的声电转换的关键元件是驻极体振动膜——一片极薄的塑料膜片,经过高压电场驻极后,与金属背电极之间就形成一个电容。当驻极体膜片遇到声波振动时,引起电容两端的电场发生变化,从而产生了随声波变化而变化的交变电压。
与传统的驻极体麦克风相比, MEMS麦克风具有体积小、功耗低、可靠性高、抗干扰能力强、产品一致性高等特点,已逐步取代驻极体麦克风成为这些消费电子产品中麦克风的主流器件,实现语音采集、消除环境噪音、提高语音指令的辨析度等多种功能。
(8)MEMS喷墨打印头
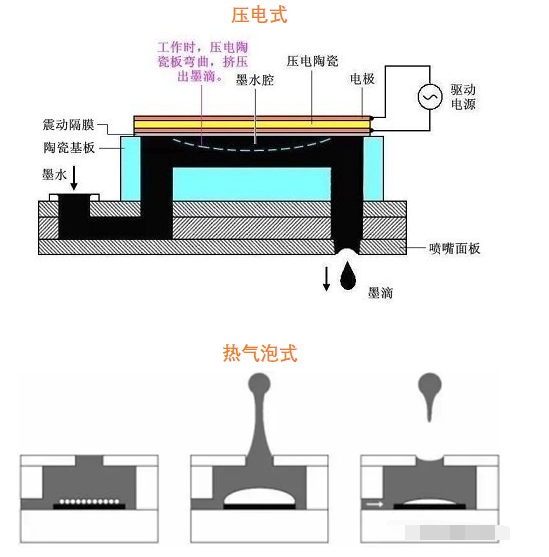
MEMS喷墨打印头跟前面提到过的微流控系统有点儿类似,只不过微流控系统主要讲的是微流体的检测和分析,而MEMS喷墨打印头实现的,则是根据控制器指令,向外喷射墨汁。
总得来说,喷墨打印头的作用是挤出墨汁,有的是利用压电薄膜震动来挤压墨水,有的是利用加热气泡变大,将腔体内的墨汁挤出。
(9)DMD(数字微镜器件)
DMD(Digital Micromirror Device,数字微镜器件),主要应用于DLP(Digital Light Processing,数字光处理)领域,即影像的投影。
投影,简单理解就是各种投影仪,将数字画面信号,通过一系列的汇聚、反射,投射到外部的过程。
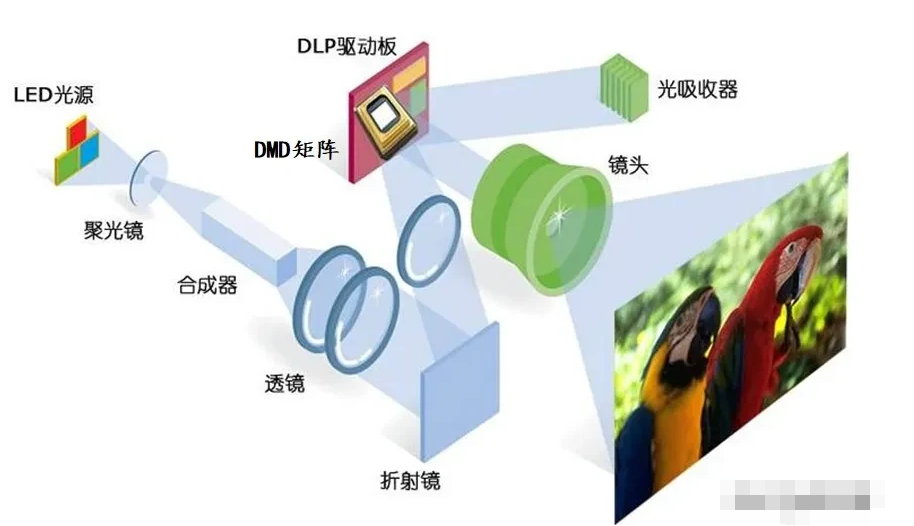
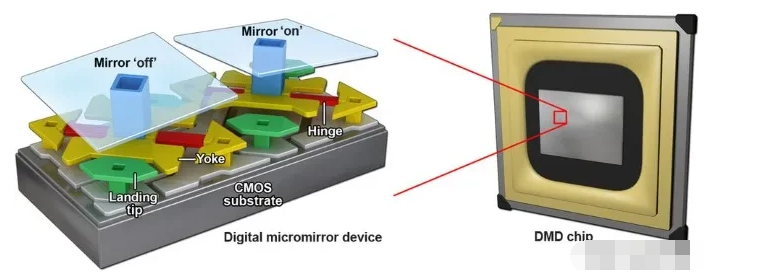
在投影系统中,DMD芯片是其中的核心部件之一。这个方寸之间的小芯片上,密密麻麻地排列着百万数量级的微镜片(精密、微型的反射镜)矩阵,每一面反射镜都可以独立反转运动,正负方向翻转,每秒钟翻转次数高达数万次。
每一个微镜片控制投影画面中的一个像素,借助微镜装置的反转,反射需要的光,同时通过光吸收器吸收不需要的光来实现影像的投影,形成不同亮度、灰度和对比度的图像。
(10)热电堆(Thermopile)
新冠疫情初期,除了口罩之外,另外一类奇货可居的商品,就是热电堆传感器了。价格飙升10倍有余,微信群里一堆倒爷到处询问有没有货源。
热电堆是一种热释红外线传感器 ,由一系列热电偶串联组成,是一种温度检测器件,主要作用是为了实现无接触式红外测温,比如非接触式的额温枪、耳温枪。
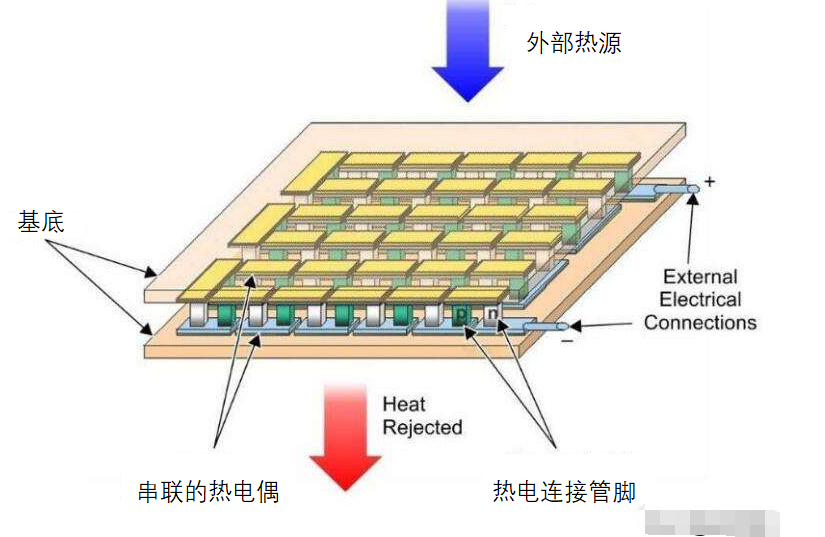
热电堆红外传感器利用塞贝克热电效应(Seebeck effect),由一系列热电偶串联组成,热电偶两端由两种不同材料组成,当一端接触热端、一端接触冷端时,会在两种不同材料之间会产生一个电势差,电势差的大小代表了两种不同材料之间的温度差。
责任编辑人:CC

















 工商网监
工商网监
评论