 电子发烧友App
电子发烧友App


电路功能与优势
图1所示的参考设计是一款高分辨率、宽带宽、高动态范围的、IEPE (Integrated Electronics Piezoelectric)兼容接口数据采集(DAQ)系统,其与ICP® (IC Piezoelectric)/IEPE传感器接口。IEPE传感器最常用于振动测量应用,但也有很多IEPE传感器用于测量温度、应变、冲击和位移等参数。
本电路笔记聚焦于该解决方案的振动应用,尤其是状态监控领域,但仪器仪表和工业自动化领域也有大量应用以类似方式使用IEPE传感器,并且由类似的信号链提供服务。
具体而言,状态监控使用传感器信息来帮助预测机器状态的变化。跟踪机器状态的方法有很多,但振动分析是最常用的方法。通过跟踪振动随时间的分析数据,可以预测故障或失效以及故障源。
工业环境需要稳健可靠的检测方法,这给振动检测增加了难度。了解机器的状况有助于提高效率和生产率,并使工作环境更安全。
市场上大多数与压电传感器接口的解决方案都是交流耦合式,缺乏直流和亚赫兹测量能力。 CN-0540参考设计是一种直流耦合解决方案,可实现直流和亚赫兹精度。
通过查看IEPE振动传感器在频域(直流至50 kHz)中的完整数据集,并使用快速傅立叶变换(FFT)频谱中发现的谐波的位置、幅度和数量,可以更好地预测机器故障的类型和来源。
数据采集板为Arduino兼容外形尺寸,可以直接与大多数Arduino兼容开发板接口并由后者供电。
ADI公司的Circuits from the Lab®电路由ADI公司的工程师设计构建。每个电路的设计和构建都严格遵循标准工程规范,电路的功能和性能都在实验室环境中以室温条件进行了测试和检验。然而,您需负责自行测试电路,并确定对您是否适用。因而,ADI公司将不对由任何原因、连接到任何所用参考电路上的任何物品所导致的直接、间接、特殊、偶然、必然或者惩罚性的损害负责。
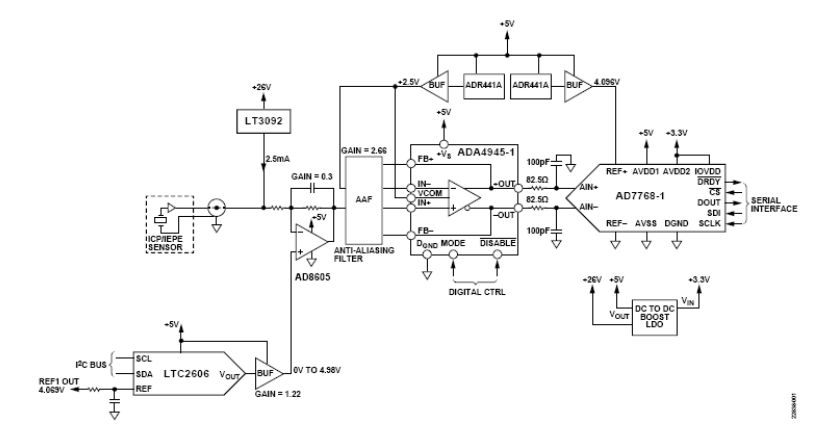
图1.IEPE压电振动传感器的状态监控信号链
电路描述
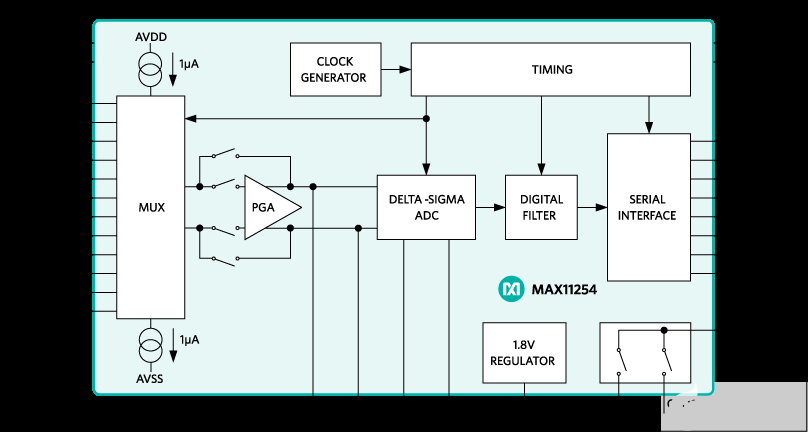
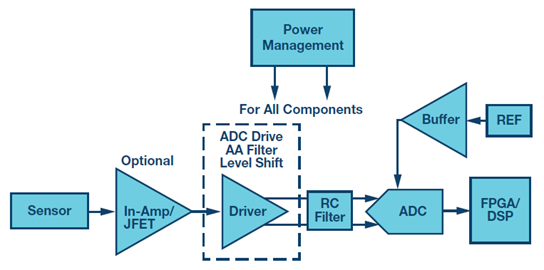
图1所示电路是IEPE传感器的传感器到比特(数据采集)信号链,包括电流源、带数模转换器(DAC)的电平转换和衰减级、三阶抗混叠滤波器、模数转换器(ADC)驱动器及全差分Σ-Δ型ADC。
可编程电流源以恒定电流驱动压电加速度计。输出电流可通过外部电阻设置,根据传感器和电缆的类型,通常设置在2 mA和20 mA之间。
DAC的缓冲和放大输出以及电平转换运算放大器,将输入信号偏移至接近2.5 V共模电压(VCOM),以平衡抗混叠滤波器的输入和全差分放大器(FDA)的输入。基准电压源将FDA供电轨的第二个输入设置为VCOM的2.5 V,确保满足输入裕量要求,并且输出是为驱动ADC而优化的全差分电压。
抗混叠滤波器将信号链的带宽设置为54 kHz。压电加速度计的带宽高达20 kHz,但就相位延迟而言,选择了更宽带宽的信号链,从而在3轴测量中实现更好的相位匹配性能。(进一步的带宽限制发生在ADC的数字滤波器中,但相位延迟是已知且确定的。)
ICP/IEPE加速度计
任何IEPE振动传感器都可以与CN-0540参考设计接口,因为所有IEPE振动传感器都利用相同的原理工作,但具有不同的偏移电压、噪声电平、带宽和灵敏度。IEPE输出信号既携带交流电压,也携带直流电压,其中与振动相关的交流电压被直流转换到介于7 V和13 V之间的某个电压电平。此直流电平随传感器的不同而异,并且对于任何给定的传感器,它都有相对于时间、温度和励磁电流的漂移分量。
IEPE传感器必须由电压范围足够高的电流源供电,以完全覆盖传感器的幅度。IEPE传感器的典型激励电压为24V。
信号链的输入可以接收高达10 V p-p的信号幅度,偏移电压最高可达13 V。直流失调通过施加直流失调校正信号来消除,从而允许在任意低频下工作。
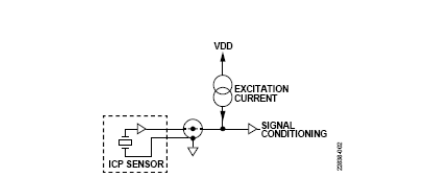
图2.ICP加速度计模块连接
图2显示了一个传感器的ICP加速度计框图,其由恒流源供电并连接到直流耦合信号链。传感器的最大带宽与激励电流成正比,与电缆电容成反比。选择恒定电流电平时,必须考虑传感器的最大期望输出电压和电缆类型,可通过下式确定:

其中:
fMAX为传感器的最大频率,单位为Hz。
IC为恒定电流,单位为mA。
1 mA为传感器的功耗要求。
C为电缆电容,单位为pF。
V为传感器的最大峰值电压输出,单位为V。
注意在式1中,从提供给传感器的总电流(IC)中减去了1 mA,该近似1 mA电流是用于为传感器本身供电,而其余电流则用于驱动电缆。此数字因传感器而异。
例如,此参考设计使用PCB Piezotronics生产的333B52型ICP加速度计进行了测试,最大峰值输出为10 V,电缆长度为10英尺,电容为29 pF/英尺,激励电流为2.5 mA。应用式1,传感器的最大理论带宽为82.3 kHz。电缆和所选的电流水平均未限制传感器的性能。
恒流源
设计恒流源(CCS)和考虑噪声性能时应多加注意。低电流噪声至关重要,因为当驱动信号链的输入阻抗时,电流噪声会被转换为电压噪声。
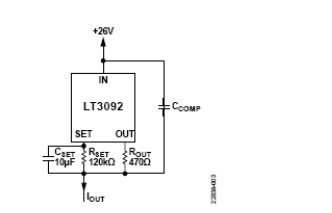
图3.恒流源
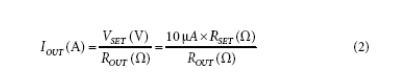
图3显示了一个2端子电流源,其电阻RSET和ROUT将输出电流设置为2.5 mA,电容CSET限制电流噪声的带宽。LT3092的内部10μA基准电流源使RSET两端保持稳定的VSET。VSET镜像到ROUT两端,根据式2设置输出电流。
请注意,由于内部基准电流从SET端子流出,因此实际的IOUT电流比式3给出的输出电流要大10μA。
数据手册建议RSET = 20kΩ,以将RSET两端的压降设置为200 mV,使失调电压的影响最小。(在较小的VSET上,失调电压更为明显。)电阻产生的白电流噪声由式3给出。

其中:
T为绝对温度,单位为K。
k为玻耳兹曼常数(J/K)。
R为电阻。
电阻电流噪声与电阻倒数的平方根成正比,因此将RSET的值从建议的20 kΩ增加到120 kΩ时,ROUT也需要成比例地增加(而输出电流保持在相同水平),导致整体噪声电流下降。建议在RSET两端接一个电容CSET,用以降低RSET和LT3092内部电流基准的电流噪声。CSET电容旁路LT3092产生的电流噪声。
如图3所示,对恒流源进行了LTspice仿真,以优化元件值和布局依赖性。为了仿真Keysight E3631台式电源(其两路输出串联连接,总电压设置为26V),我们建模了一个非理想电压源,其在20 MHz带宽内具有0.7 mV rms的电压噪声和224 nA rms的电流噪声。
表1列出了不同元件值组合的均方根噪声。均方根电流噪声针对1 mHz至100 kHz的带宽进行了仿真。CCOMP的作用类似于高通滤波器,将噪声从电压源传递到输出。进一步增加RSET和ROUT有助于降低电流噪声,但也会导致电阻上的压降更高,从而降低容许的信号摆幅。
表1.降低LT3092电流噪声
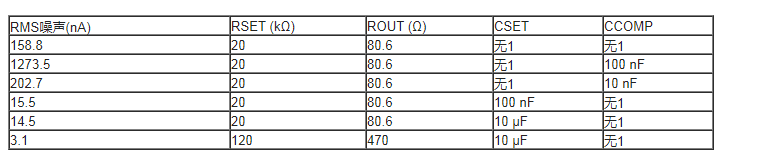
1 无需元件。
当使用具有高电感的长电缆时,稳定性可能成为问题。有关补偿感性负载的更多信息,请参阅LT3092数据手册。
要计算电流源提供的可用传感器激励电压,请使用下式:
![]()
其中:
VDD为恒流源的电源电压。
LT3092DROP为IC本身的压差(负载电流最高10 mA时,其通常为1.2 V)。
RSET×10μA给出电阻上的压差,其设置输出电流电平,内部10μA电流流过电阻。
在这种情况下,可用激励电压为23.6V。
电压电平转换器
电压电平转换器可承受高达13 V的传感器偏移电压,信号摆幅最高可达10 V p-p,支持市场上的大多数压电传感器。选择的是带运算放大器的反相电压电平转换器拓扑,需要一个正转换电压来降低输入电压,以适应FDA级的输入要求。
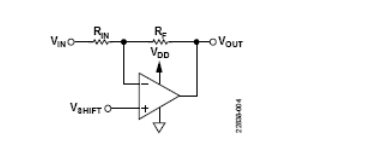
图4.反相电压电平转换器
图4显示了一个带运算放大器的反相电压电平转换器拓扑。转换电压通过下式计算:
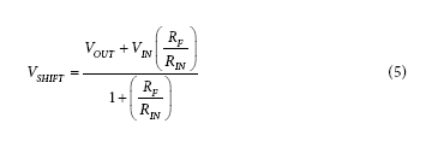
电压转换器产生的VOUT电压设置为尽可能接近VCOM (2.5 V),以平衡下一级中FDA的输入。RF/RIN比值(运算放大器的衰减)必须遵循以下约束:
•转换运算放大器的电源电压:5 V
•转换电压范围:0 V至5 V
•运算放大器的稳定性
•ADC的满量程范围:±4.096 V
•输入信号幅度:10 V p-p
•输入直流偏移电压:最高13 V
0.3的衰减是合理的折衷方案,下一级中的较小增益可使ADC的输入幅度最大化,并提高信噪比(SNR)。请注意,电平转换器输出端的信号和噪声都会被放大,因此最大限度地降低电平转换器的输出噪声至关重要。
在CN-0540中,输入阻抗和输入噪声之间进行了折衷,输入噪声电平足够低,输入电阻则足够高,以防止引入测量误差。压电传感器一般为低阻抗输出(数百欧姆)传感器,哪怕相对较低的信号链输入阻抗(数十kΩ)也会引入不到1%的误差。作为折衷方案,选择的最终输入阻抗RIN = 50kΩ。
使用下式计算输入短路时电平转换器模块的电压噪声:
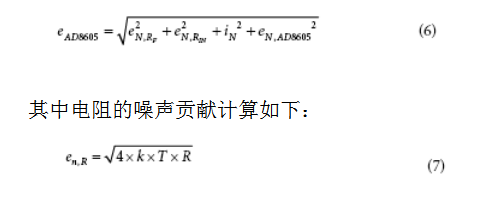
其中:
k为玻尔兹曼常数。
T为绝对温度,单位为K。
R为电阻,单位为欧姆。
在平方之前,必须将除RIN以外的所有贡献乘以噪声增益。反相运算放大器配置的噪声增益与同相配置的噪声增益相同。
其中NG为电路的噪声增益。
电压电平转换器模块的单极点RC滤波器可限制噪声。使用下式计算电压电平转换器产生的噪声均方根值:

第一级的噪声贡献为20.8μVrms,其中最重要的噪声贡献者是RIN,这是将输入阻抗设置得足够高以使负载引起的误差最小化的结果。
直流偏置补偿技术
每个IEPE加速度计都有一定的直流偏置电压,此电压没有携带任何有用的信息,因此必须将其消除。如果信号链中使用了直流耦合,便可让输入电压直流转换以抵消直流偏置电压,使得ADC仅接收输入电压的交流部分,而没有任何直流偏移。精确的直流转换对于直流测量的精度和测量动态范围的最大化至关重要。
使用式5中的转换电压可以找到确切的转换电压。按照这种方法,必须分别为每个电路板和传感器进行不同温度下的数次测量,从而确保测量的准确性。
本电路使用了其他更精确、可靠且自动化的技术。CN-0540中采用了定制的逐次逼近算法。标准逐次逼近模型使用DAC至ADC控制环路估算未知电压电平的最终位置,而该定制逐次逼近算法试图使用DAC至ADC环路将ADC输入端的平均电压设置为尽可能接近于0。换句话说,主要目标是将FDA的两个输入设置为相同电压电平,即VCOM = 2.5V。
表2.输入偏置电压补偿过程
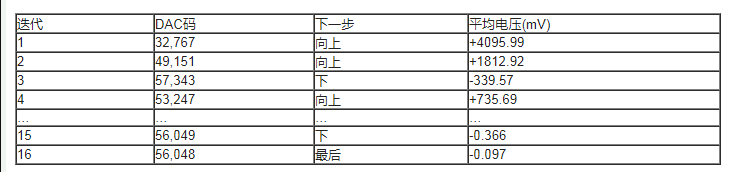
表2显示了使用逐次逼近算法补偿输入偏置电压的过程。由于选择了16位DAC,因此进行了16次迭代。在此过程的最开始,DAC被设置为半量程输出。每次将DAC设置为新值时,均要测量平均电压。如果平均电压为正,则将1位权重加到当前DAC输出,否则就从当前DAC输出中减去1位权重。由于输入运算放大器使用反相配置,因此该过程是相反的。
第四个DAC输出= (215 – 1) + 214 + 213 – 212 = 53,247 (11)
式11显示了加上或减去的位权重。215 − 1为初始半量程值,然后是两次向上和一次向下,意味着加上第14 位和第13 位,并减去第12 位。
由于传感器的内部结构,压电传感器本身会产生相当显著的电压噪声。传感器通电后,传感器始终会拾取环境噪声,导致更多噪声从机械环境事件转换为电压噪声。为了仅提取压电传感器的直流偏置电压,以及消除相当显著的噪声(随机噪声或周期性噪声),直流偏置补偿过程中会进行大量平均运算。
电平转换DAC
选择具有27个可选I2C地址的16位电压输出DAC (LTC2606)进行电平转换。DAC与ADC共享4.096 V基准电压。为了实现转换运算放大器的同相输入端预设的0 V至5 V完整转换电压范围,并降低DAC输出电压噪声,电路增加了一个外部缓冲器。该缓冲器具有Sallen-Key结构,截止频率为100 Hz,增益为1.22。具有增益输出的DAC的1 LSB为
从DAC到ADC输入的路径上还有其他增益。ADC输入端观测到的1 LSB变化放大4.23倍(所有增益的乘积),如下所示:
总LSBDAC =

其中,2.667是FDA的增益,1.3是转换运算放大器的增益;当将变化的信号引入同相输入端时,转换运算放大器像同相运算放大器一样工作,实际增益为1 + (RF/RIN)。式13的计算得出将传感器调整到正确电平所引起的最大理论直流误差。
表2证明,ADC转换的DAC 1 LSB约为264μV。检查最后两个ADC读数,差异仅为1 LSB,产生269μV。
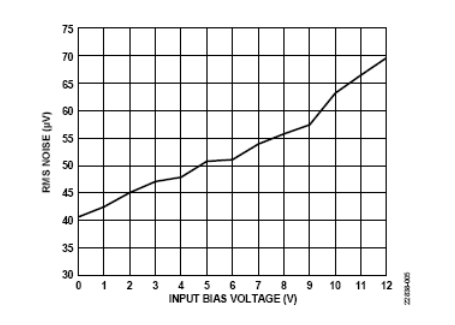
图5.RMS噪声与输入偏置电压的关系
图5显示了仅将输入偏置电压施加于信号链输入端时均方根噪声如何变化。每次改变输入偏置时,DAC都会将输入调整至正确电平,确保失调误差很低。信号链的均方根噪声随直流偏置的增加而增加,因为提供直流偏置的直流校准器在较高电压输出电平下会产生更多噪声。
从图5可知,动态范围响应均方根噪声的提高,导致输入偏置电压提高,如图6所示。
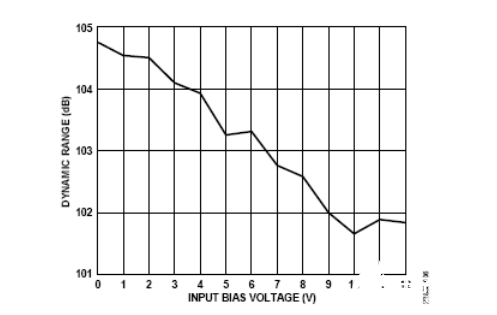
图6.动态范围与输入偏置电压的关系,1 kHz 1 V p-p输入
图7显示了系统线性度与输入偏置电压的关系,使用的输入信号频率为1 kHz,幅度为1 V p-p。图7表明,输入偏置电压对线性度没有明显影响,总谐波失真(THD)保持稳定。
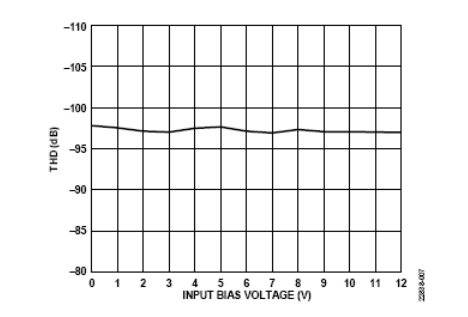
图7.线性度与输入偏置电压
图8显示了整个温度范围内ADC输入端预设的失调电压误差。失调误差是使用相同输入电压(10 V)在整个温度范围内运行输入偏置电压补偿程序而确定的。25°C下的测量结果定位0 V失调误差。
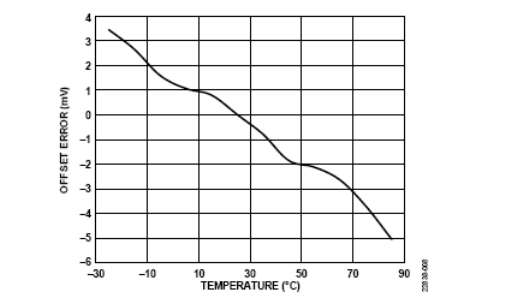
图8.10 V输入偏置电压在整个温度范围内的失调电压误差
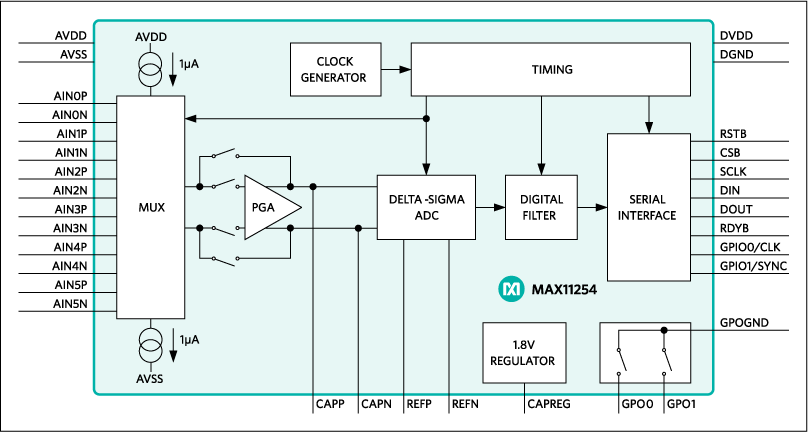
如图1所示,使用了基准电压为2.5 V的基准电压芯片(ADR441A),确保VCOM稳定。此基准电压IC具有很高的温度漂移特性,在-25°C至+ 85°C的温度范围内,电压变化值为2.75 mV。此变化乘以2.667的FDA增益,导致ADC检测到7.33 mV的总温度漂移,该漂移随后由DAC予以补偿。
每次输入电压或VCOM发生变化时(VCOM仅因温度漂移而变化),DAC都会反向补偿该变化。在这种情况下,仅VCOM发生变化,输入偏置则保持稳定。ADR441A的电压漂移占主导地位,这可以从图8看出,其形状与ADR441A的电压漂移曲线相反。在指定温度范围内,数字码的总变化为32 LSB。
DAC缓冲器
DAC的内部缓冲器会限制电压噪声,必须进行滤波。由于DAC与ADC共享4.096 V基准电压,因此DAC输出也必须放大以提供0 V至5V。
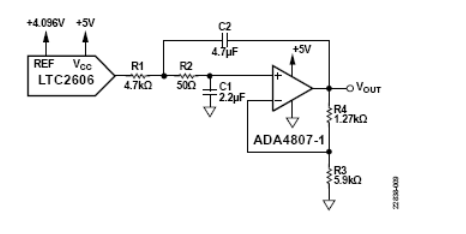
图9.带缓冲器的DAC
图9显示了采用低通Sallen-key滤波器结构且具有增益输出的电平转换DAC。滤波器的截止频率通过下式设置为大约100 Hz的较低值:

由于对Sallen-key滤波器拓扑应用了一个增益,因此必须考虑滤波器的稳定性。否则,缓冲器很可能会变成振荡器。另一个与稳定性相关的因素是滤波器质量(Q),此模块必须加以考虑。Q因子应保持足够低的值(小于0.707),以确保频率响应在截止频率处没有峰化,滚降具有较和缓的斜率,而且开始频率显著早于截止频率。低Q因子适合于需要在整个频率范围内具有高线性度的应用。注意,只要Q因子变为负值,结构便变得不稳定。使用下式确定Q因子:
对于图9所示的值,截止频率为102 Hz,k为1.215,Q为0.27,稳定性和平滑滚降均有保证。
我们比较了有缓冲器和无缓冲器的DAC转换模块的噪声性能。请注意,用于该测量的信号链在输入短路时具有12.3μV rms的噪声和108.2 dB的动态范围。该均方根噪声是在64 kHz带宽下测得的。
表3显示了输出电压如何随DAC码变化。DAC输出以渐进方式设置:从零到四分之一量程、半量程,最终达到四分之三量程。在最坏情况下,DAC转换模块的噪声贡献仅为1.3μV rms。
表3.ADC测得的DAC输出的噪声比较

抗混叠滤波器和FDA
抗混叠滤波器和FDA使用差分多反馈低通结构,并将单端信号转换为差分信号。抗混叠滤波器的截止频率设置为54 kHz,这比大多数压电加速度计的带宽要宽。该滤波器在2.3 MHz时提供−80 dB的阻带抑制。
此级的增益设置为2.667,以便通过提升输入幅度来更紧密地匹配ADC输入的±VREF范围,从而改善SNR。FDA也会放大宽带噪声,但由于抗混叠滤波器会限制宽带噪声,因此性能的降低小于信号增益带来的改善。
模数转换
AD7768-1是一款精密、单通道、24位Σ-Δ型ADC,选择这款器件的原因是它具有出色的DC至204 kHz带宽精度、低功耗、108.5 dB(典型值)动态范围和−120 dB THD。
使用式17计算ADC的输出数据速率:

其中:
MCLK为主时钟。
MCLKDIV为主时钟分频器系数。
FILTEROSR为所选数字滤波器的过采样率(OSR)。
时钟分频器和滤波器OSR是寄存器设置,可以通过SPI总线进行更改。有限脉冲响应(FIR)和SINC5滤波器的OSR是在AD7768-1的寄存器映射中严格设置。用户可以使用下式将特定值写入13位SINC3抽取率寄存器,从而将SINC3滤波器设置为自己偏好的OSR并更改输出数据速率:

其中,ODR为所需的输出数据速率,单位为Hz;213 为SINC3寄存器可接受的最大值。例如,对于4 Hz输出数据速率、16.384 MHz MCLK及低功耗模式(MCLK/16),SINC3寄存器值为7999。
此参考设计的默认设置针对32 kHz的ADC测量带宽进行了优化,如下所示:
•功耗模式:低功耗模式
•MCLK分频器:16
•滤波器类型:FIR
•滤波器抽取率:32
•输入预充电缓冲器:使能
•基准电压缓冲器:使能预充电
•VCM引脚输出:(AVDD1 − AVSS)/2
•转换长度:24位
•转换模式:连续
•校验和:无校验和
•数据读取模式:连续
•状态位:禁用
•DRDY信号:使能
针对低功耗、高要求的应用,两个缓冲器均可关闭。但是,缓冲器保持开启可改善整体THD和SNR。
表4.针对不同带宽的建议ADC设置
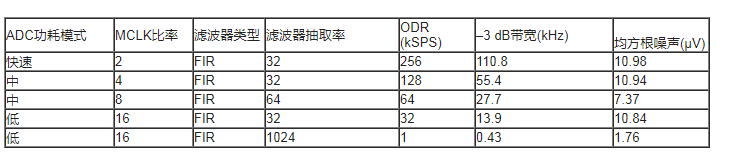
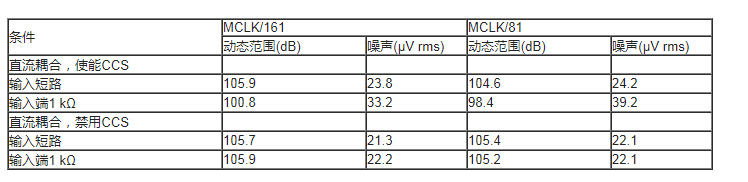
表5.信号链噪声测量
1 低纹波FIR滤波器带宽 = 0.433×ODR。
信号链的实测性能
该信号链设计针对的是中等到更宽带宽的振动检测,较高的谐波和高于1 kHz的频率成分很重要。设计必须权衡系统带宽、线性度和可实现的噪声性能。选择较高的输入阻抗以保持信号精度(线性度),在此设计中它决定了最大噪声性能极限。信号带宽也被设置得较宽,以保持系统在较高频率下的响应。使用带宽较窄的设计可以实现更低噪声解决方案,消除更多的宽带噪声。
CN-0540将模拟输入带宽设置为54 kHz,但实际信号带宽由ADC配置决定。
噪声
在几种不同情况下对整个信号链的噪声性能进行了测量。
表5详细列出了未连接任何传感器时和添加1 kΩ负载电阻时信号链的典型噪声性能。在信号链输入端连接1 kΩ电阻的结果表明,恒定电流源会影响噪声性能。电流噪声转换为电压噪声,乘以1 kΩ电阻,导致系统噪声升高。
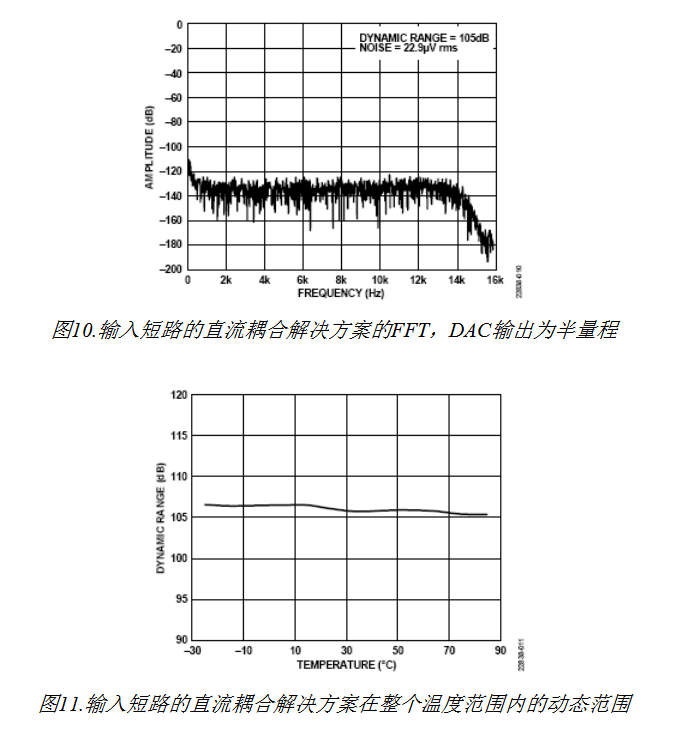
图10显示了输入短路的系统的典型FFT图。图11显示了输入短路的直流耦合解决方案在整个温度范围内的动态范围。
传感器噪声贡献
数据采集系统设计人员的常见目的是尽可能准确地捕获传感器输出信号。这在实践中意味着,系统性能应该由传感器特性设置。传感器的噪声性能常常是整体测量系统的关键限制因素之一,了解这一点有助于确定设计的性能要求。
此设计的目标是支持传感器以在大于1 kHz的带宽提供振动数据,这些传感器用于状态监控应用的数据采集系统,以对旋转式或往复式工厂设备进行预测性维护。
表6详细列出了少量振动传感器的性能水平和带宽。传感器选择的主要考虑因素通常是带宽、范围、噪声频谱密度(NSD)和功耗。
ADXL1002和ADXL1004传感器是低功耗器件,适用于功耗和带宽至关重要的各种振动应用。这些加速度计适合于连续监控应用,例如物联网(IoT)机器监控。
如需最高灵敏度和带宽(较高频率下的低噪声和灵敏度至关重要),压电传感器仍然是最适合使用的传感器。由于AD7768-1具有宽带宽和低噪声特性,因此该信号链可在超过10 kHz的较宽带宽范围内匹配典型传感器的性能水平。
对于CN-0540,系统带宽设置为54 kHz,信号链噪声性能针对的是可以在该带宽上实现》100 dB动态范围的传感器。例如,Piezotronics PCB 621B40型加速度计在30 kHz时可实现近105 dB的动态范围。
通过调整各级的电阻值和增益,并且利用AD7768-1的较高过采样模式,该电路可适用于动态范围更高、带宽更窄的传感器。完整的分析超出了本文的范围,但AD7768-1数据手册中提供了有关使用过采样时权衡动态范围和带宽的更多信息。
表6.传感器及相应的噪声密度测量结果

线性度
传感器测量系统的线性度对于确保测量结果不会因传感器输出变化而变化至关重要。测量系统的精度不应随输出偏置电压或传感器信号幅度变化而变化。理想情况下,当测量系统的温度发生变化时,精度也应保持不变。
CN-0540被设计为尽可能线性,并在整个温度范围内保持该线性度,因此对测量信号链的校准需求不多。系统对直流输入电压变化的非线性被报告为INL误差。系统对正弦波输入的非线性被报告为THD误差。
图12和图13中的数据表明:在宽输入电压范围内,直流线性度(INL)在±10 ppm以内;在宽温度范围内,INL和THD均相对平坦。
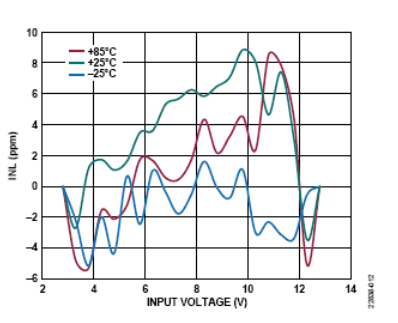
图12.不同温度下INL与输入电压的关系
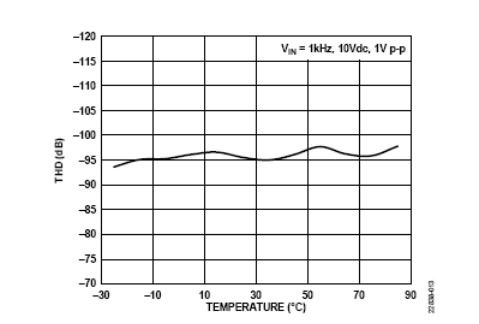
图13.THD与温度的关系
交流与直流耦合解决方案
CN-0540针对的是直流耦合应用场景,其中必须保留信号的直流分量,或者必须将系统的响应保持到低于1 Hz或更低的频率。因此,该系统设计用于处理IEPE传感器的大直流偏置。
但是,某些系统可能不需要低至DC的响应,在这些情况下,交流耦合输入通道是可接受的。
两种解决方案的主要区别在于信号链的复杂性以及直流和低频时的精度。交流耦合解决方案的复杂度较低,但在低频时精度不高。
用户可以插入一个耦合电容与输入电阻串联,使该设计适应交流耦合设计。如需更多信息,请参阅设计支持包中的原理图文件。
插入耦合电容的效果是将输入响应变为高通响应,在这种情况下,通常选择远小于10 Hz的极点频率。此滤波器不仅阻隔直流偏置电流,而且会消除一些1/f噪声。交流耦合系统的动态范围似乎高于直流耦合版本,但这仅仅是由于消除了低频噪声。这样做的代价是对低频振动测量数据的灵敏度降低。
由于DAC输出以及信号链输入端缺少高通滤波器,直流耦合解决方案的噪声预期也会更高。图14显示了CN-0540交流耦合时的响应,其高通截止频率为1 Hz。测量条件如下:信号链的输入短路,使能恒流源,ADC处于低功耗模式,MCLK/16,FIR滤波器抽取率为32,直流耦合测量。
图14.输入短路的交流耦合解决方案的FFT
如果实施交流耦合解决方案,则必须选择正确的电容类型以获得最佳性能。一般而言,陶瓷电容会因为压电效应而产生噪声,因为电压系数(相对介电常数随施加的电压而变化)和电介质吸收而产生非线性。钽电容可提供合理的性能,并且可制造出宽范围的电容值,最高可达数百μF。在交流耦合情况下,钽电容可以实现的THD性能水平与直流耦合系统相似,但频率须高于10 Hz。为了准确表示更低频振动,最好选择直流耦合版本。
系统电源
CN-0540带有一个最优电源解决方案,支持通过3.3 V单电源轨为整个信号链供电。
电源解决方案
图15显示了CN-0540电源部分的简化框图。为了与具有Arduino样式连接的微控制器和其他开发板兼容,该板的电源解决方案设计为采用3.3 V单电源(通常由Arduino兼容板提供)供电。
为了确保系统的稳定性,微控制器板应能通过3.3 V电源向振动监控板供应至少250 mA的电流。这不算微控制器板本身从该电源获取的电源电流。
虽然CN-0540评估板在稳态工作时不需要250 mA电流,但在初始上电阶段,可能有高达200 mA或更高的浪涌电流并持续最长30 ms。如果微控制器板无法承受此电流,可能导致微控制器板上发生复位。如果发生意外复位,请检查微控制器板的电流输出规格。
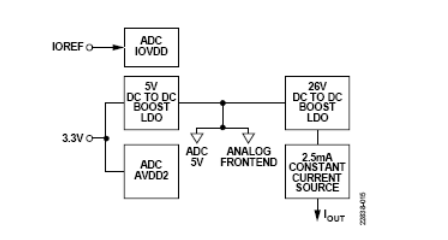
图15.电源部分框图
电源解决方案包括三个电压域:3.3 V域、5 V域和26 V域。它还包括用于IEPE传感器的2.5 mA电流源。
Arduino兼容板提供CN-0540直接使用的IOREF电源,因此不需要电源解决方案。IOREF为AD7768-1 (IOVDD)提供数字接口电源,并为16.384 MHz主时钟源供电。
CN-0540与低至1.8 V的IOREF电压兼容,因此CN-0540板可连接至逻辑电平较低的微控制器板。
所提供的电源解决方案电路的目的是让CN-0540板可以从单个低压电源(通常由微控制器板提供)供电,并从该电源生成其他所需的电压轨。在CN-0540上,原始3.3 V输入供电轨直接用于为AD7768-1提供数字接口逻辑电源(AVDD2电源),而且还为DC-DC级提供电源,从而将电压提升至5 V和26 V。
第一个DC-DC级将3.3 V升压至7 V,然后通过LTC3459和ADP7118器件组合调节至5 V,以提供AD7768-1、LTC2606和ADR4540基准电压源以及相关放大器级所需的干净供电轨。
第二个DC-DC级将3.3 V升压至28 V,然后通过LT3494和LT3008器件组合调节至26 V。这个干净的26 V电源轨用于为LT3092电流源供电,从而为IEPE传感器提供2.5 mA电流和高达26 V的电压。
功耗测量
功耗测量直接从3.3 V和IOREF供电轨进行。因此,功耗测量包括电源解决方案元件本身的贡献。
由于恒流源,流向26 V供电轨的电流是恒定的,不会随ADC设置而变化。
系统其余部分的功耗在ADC的不同工作模式下进行了测量。信号链输入端放置了一个1 kΩ负载电阻,以为恒流源流出的电流提供一条路径,并在AD8605的输入端保持直流偏置。
功耗
ADC上影响功耗的最重要寄存器设置为
•电源模式
•MCLK分频器
•MCLK频率
•滤波器类型
•滤波器抽取率
•VCM引脚输出分压器
•模拟输入预充电缓冲器
•基准电压缓冲
•通用输入/输出(GPIO)
系统默认配置
对于ADC设置,针对窄带宽测量的系统默认配置如下:
•MCLK分频器:MCLK/16
•功耗模式:低功耗模式
•FIR滤波器,抽取率超过32
•VCM引脚输出:(AVSS − AVDD)/2
•基准电压(REF)缓冲器:预充电开启
•模拟输入(AIN)缓冲器:预充电开启
•MCLK频率为16.384 MHz
•使能FDA,低功耗模式
•使能DAC缓冲器
•DAC输出设置为半量程
该参考设计中包含的大多数测量均使用系统默认配置。
表7.各种数据速率下的功耗

1 FDA处于全功率模式。
2 FDA处于低功耗模式。
AD7768-1上的模拟输入和基准电压输入缓冲器设置为预充电模式。ADA4945-1 FDA设置为低功耗模式。在全功率模式下,FDA可以提供更宽的带宽和更好的线性度性能。但是,由于此设计的目标带宽小于50 kHz,因此低功耗模式就够了。通过使能AD7768-1内部预充电缓冲器,可以实现更好的线性度和噪声性能,而不会显著增加系统功耗。有关匹配驱动器放大器以及使用AD7768系列的输入缓冲选项的更多信息,参见应用笔记AN-1384。
常见变化
对于更高通道数的系统,多通道AD7768和AD7768-4是AD7768-1的合适替代产品。ADC的噪声和线性度与AD7768-1相似,但这些器件的优势是可在单个芯片中提供多达8个同步通道,从而简化多通道IEPE DAQ设计的实现。
其他可以考虑用于振动和状态监控信号链的ADC有AD4000、AD4002和AD7380。
ADA4610-1适用于第一级信号调理和电平转换,但需要更高的电源电压才能正常工作。ADA4807-1和ADA4940-1是ADC输入抗混叠滤波器和驱动器级的替代产品。
ADAQ7980/ADAQ7988是16位ADC μModule®数据采集系统,ADC和ADC驱动器级以及最关键的无源元件均被集成到系统级封装(SiP)设计中。建议在尺寸或实现的简易性更为关键的场合使用这些器件。
这些方案允许根据性能(噪声或线性度)、解决方案尺寸和成本来选择信号链元件。
电路评估与测试
下面概述CN-0540电路设计的测试程序和结果的收集。有关硬件和软件设置的完整详细信息,参见CN-0540用户指南。
设备要求
需要以下设备:
•EVAL-CN0540-ARDZ参考设计板
•Terasic DE10-Nano FPGA
•带有CN-0540参考软件的FPGA Linux镜像
•HDMI转HDMI电缆
•带有USB加密狗的无线键盘和鼠标
•USB on-the-go (OTG)电缆(micro USB转USB)
•精密交流电源(例如,Brüel&Kjær AP2700或类似精密正弦波发生器)
•带BNC和SMA终端的同轴电缆
图16.CN-0540参考设计板的3D渲染图
开始使用
基本测试设置要求将EVAL-CN0540-ARDZ板插入支持的FGPA载板。载板需要为EVAL-CN0540-ARDZ板供电、运行嵌入式Linux镜像、捕获数据并显示数据。该软件可从ADI公司网站获得,其支持Terasic DE10-Nano和类似的Arduino兼容FPGA载板。
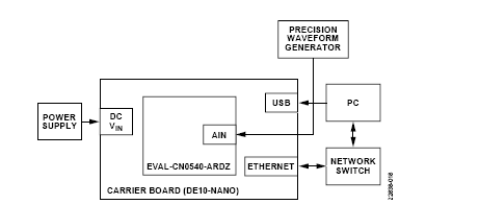
图17.设置框图
要测试该板的基本功能,请将精密高质量正弦波或任意波形发生器连接到EVAL-CN0540-ARDZ板的模拟输入连接器。
分步说明如下:
1. 插入Arduino接头,将EVAL-CN0540-ARDZ评估板安装到载板上(Terasic DE10-Nano),如图18所示。
图18.EVAL-CN0540-ARDZ安装在Terasic DE10-Nano载板上
2. 将同轴电缆的BNC端连接到信号源单端或不平衡输出,另一端连接到EVAL-CN0540-ARDZ模拟输入SMA连接器(参见图19)。
图19.同轴电缆连接到CN-0540模拟输入连接器的特写照片
3. 将ADI FPGA Linux镜像加载到micro SD卡上。
4. 配置micro SD卡以对CN-0540和载板使用正确的文件。
5. 将HDMI电缆从Terasic DE10-Nano连接到显示器。
6. 将USB OTG电缆连接到Terasic DE10-Nano上的micro USB端口,然后插入无线鼠标/键盘的USB加密狗。
7. 使用所提供的电源,将管式插孔连接到DE10-Nano,然后接通Terasic DE10-Nano电源开关。
8. 按照如下步骤开启正弦或任意波形发生器的电源:
a. 将信号类型设置为正弦波。
b. 在1 kHz下将电平设置为1 V p-p。
c. 使能输出。
9. 运行该软件并捕获生成的ADC数据和FFT数据。
图20和图21中的两幅图显示了按照步骤1至步骤9所述进行配置时载卡的预期典型捕获结果。图20显示了ADC捕获数据的时域视图,说明了多个样本的预期幅度。
图20.时域数据
图21显示了经过处理后显示为频域FFT图的相同数据。
图21.所捕获数据的FFT
有关硬件和软件设置的更多信息,请参阅CN-0540用户指南以了解详情。
压电加速度计传感器结果
为了实现合理的噪声测量,必须让压电加速度计保持稳定——要么使用主动振动台来抵消环境振动,要么将其固定在大型物体上以减少从环境中拾取的振动。在压电加速度计直接连到信号链输入端的场合,使用了固定到大型物体的方法。所用传感器为Piezotronics PCB 333B52型3 kHz传感器。
图22显示了连接传感器时获得的FFT的比较性能图。系统的噪声主要由传感器信号决定。
图22.连接有无源稳定压电传感器的直流耦合解决方案的FFT

















 工商网监
工商网监
评论