 电子发烧友App
电子发烧友App


车辆中使用的传感器种类繁多,从温度和触摸传感器到加速度计和陀螺仪。本文着眼于在具有扩展温度范围和更高电压保护的中将传感器连接到有线网络(例如 LIN、CAN 和以太网)的问题。
现代汽车网络将协议组合用于不同的应用。车辆周围的传感器越来越多地用于各种应用——从用于摄像头的图像传感器到用于加热和乘客识别的温度传感器——意味着不同的传感器必须连接到不同的网络。
本地互连网络 (LIN) 用于低成本应用,主要用于数据速率通常为 10 至 20 kbit/s 的车身电子设备,而控制器局域网 (CAN) 用于高达 10 Mbit/s 的主流动力系统和车身通信s。FlexRay 总线用于高级系统(如主动悬架)中的高速同步数据通信。MOST 总线被一些车辆设计人员用于以 50 到 100 Mbit/s 传输音频甚至视频的更高性能网络,尽管汽车中也正在开发 100 Mbit/s 以太网网络来传输此类数据。
传感器要测量的一个关键参数是温度,因为它可以以多种不同方式用于提供重要信息。使用数据的方式,即使是相同类型的传感器,也需要不同的总线接口。例如,Melexis MLX90620 等红外温度传感器可用作汽车空调控制系统中的“热舒适”传感器,但它也可用于乘客分类,甚至用于盲角检测。所有这些应用程序都将连接到具有不同设计要求的车辆中的不同有线网络。
当车厢内湿度高、前挡风玻璃温度低时,水汽会凝结在玻璃上,导致驾驶员视线模糊。HVAC 系统可以通过在挡风玻璃上吹干热空气来避免这种冷凝。为此,系统必须能够检测到冷凝,甚至更好地进行预测。这可以使用红外温度计、湿度传感器和外部温度计来完成。
该传感器还可用于确定座位上是否有乘客,启用或禁用安全气囊。红外传感器甚至可以用于盲点检测。一个系统使用被动红外传感器来感应从移动车辆的轮胎辐射的热能。该温差用于触发闪烁的红灯,以警告驾驶员危险。
红外温度传感被用作测量体温的更准确和更具成本效益的替代方案。IR 模块不是测量空气样本,而是直接测量体温。它的数字传感器接口还避免了可靠性和设计复杂性问题。
小尺寸、低成本的 16 x 4 像素 IR 阵列易于与行业标准的四引线 TO-39 封装集成。出厂校准的红外温度测量参数存储在 EEPROM 中,该器件可以在 4 Hz 刷新率下提供 0.25K rms 的噪声等效温差 (NETD)。它采用 2.6 V 电源供电,工作温度范围为 -40 至 85°C。
它在一个封装中包含两个芯片:带有信号调节电子器件的 MLX90670 IR 阵列和 24AA02 (256 x 8 EEPROM) 芯片。MLX90620 包含 64 个 IR 像素,并集成了专用的低噪声斩波稳定放大器和快速 ADC。集成了一个与绝对温度成比例的传感器 (PTAT),用于测量芯片的环境温度。IR 和 PTAT 传感器的输出都存储在内部 RAM 中,并可通过 I²C 访问。
红外传感器测量的结果存储在 RAM 中,每个传感器的 16 位红外测量结果(64 个字)和 PTAT 传感器的 16 位结果。根据应用的不同,外部微控制器可以读取不同的 RAM 数据,并根据存储在 EEPROM 存储器中的校准数据,补偿传感器之间的差异以建立热图像,或计算成像场景中每个点的温度。 这些常数可由用户微控制器通过 I²C 总线访问,并且必须用于热数据的外部后处理。结果是 NETD 在 1 Hz 刷新率下优于 0.08K rms 的图像。
阵列的刷新率可通过寄存器设置或直接通过 I²C 命令进行编程。刷新率的变化对积分时间和噪声带宽有直接影响,因为更快的刷新率意味着更高的噪声水平,因此帧率在 0.5 Hz 至 12 Hz 范围内可编程,并且可以更改以实现所需的交易在速度和准确性之间徘徊。MLX90620 需要一个 3 V 单电源 (±0.6 V),尽管该器件经过校准并且在 VDD=2.6 V 时性能最佳。
对于应用设计人员来说,了解温度测量的精度对传感器封装没有温差时的热平衡条件非常敏感,这一点非常重要。温度计的精度可能会受到封装内温度差异的影响,这些温度差异是由传感器后面的热电子器件、传感器后面或旁边的加热器/冷却器或非常靠近传感器的热/冷物体引起的,这些物体不仅加热温度计中的传感元件以及温度计封装。
这种效应对于具有小 FOV 的温度计尤其重要,因为传感器从物体接收到的能量会减少。IR 传感器天生就容易受到由热梯度引起的误差的影响。这些现象是有物理原因的,尽管 MLX90620 进行了精心设计,但建议不要让设备受到热传递,尤其是瞬态条件。
I²C 上的容性负载会降低通信性能。通过在上拉电路中使用电流源而不是电阻器可以进行一些改进,并且可以使用专门的总线加速器进行进一步的改进。使用 MLX90620,可以通过增加上拉电流(减小上拉电阻值)来进一步改进。I²C 兼容模式的输入电平具有比 I²C 规格更高的整体容差,但即使采用高功率 I²C 规格的上拉电流,输出低电平也相当低。另一种选择可能是采用较慢的通信(时钟速度),因为 MLX90620 在 I²C 兼容模式下对其输入实施施密特触发器。因此,它对总线的上升时间并不敏感(上升时间比下降时间更有可能成为问题,因为 I²C 系统是开漏带上拉的)。这种较慢的时钟频率意味着 LIN 总线是将温度传感器连接到电子控制单元的理想方式。
LIN/SAE J2602 是一种基于通用异步收发器 (UART) 的单主多从网络架构,最初是为汽车传感器和执行器网络应用而开发的,并为连接电机、开关、传感器提供了一种经济高效的网络选项和车内的灯。LIN 主节点通过将 LIN 与更高级别的网络(例如 CAN)连接,将车载网络的通信优势一直延伸到各个传感器和执行器。
LIN 总线的开发旨在为汽车网络中的低成本、低端多路复用通信创建标准。尽管 CAN 总线满足了对高带宽、高级错误处理网络的需求,但 CAN 实现的硬件和软件成本对于传感器等性能较低的设备来说已经变得过高。LIN 在不需要 CAN 的带宽和多功能性的应用中提供具有成本效益的通信。LIN 可以使用嵌入到大多数现代低成本 8 位微控制器(例如Microchip PIC18 )中的标准串行通用异步接收器/发送器 (UART) 轻松实现,尽管也有专用的 LIN 接口设备。
LIN 总线采用主/从方法,包括一个 LIN 主设备和一个或多个 LIN 从设备。消息头由用于标识帧开始的中断和从节点用于时钟同步的同步字段组成。标识符 (ID) 由 6 位消息 ID 和 2 位奇偶校验字段组成,ID 表示特定的消息地址,但不表示目的地。在接收和解释 ID 后,一个从机开始消息响应,该响应由 1 到 8 个字节的数据和一个 8 位校验和组成。
主站控制消息帧的顺序,这在一个时间表中是固定的。这可以根据需要进行更改。LIN 标准有多个版本。1.3 版完成了字节层通信。2.0 和 2.1 版本增加了更多的消息传递规范和服务,但在字节级别与 LIN 1.3 兼容。
飞思卡尔半导体的8 引脚MC33662是专用于 LIN 协议规范 1.3、2.0、2.1 和 SAEJ2602-2 的汽车 LIN 子总线应用的物理层组件。部件号选择定义了工作波特率(33662L 或 33662S 用于 20 kB/s,33662J 用于 10 kB/s 网络)。两者都集成了用于测试和编程模式的快速波特率 (10 kB/s),并提供电磁兼容性 (EMC) 和辐射发射性能、静电放电 (ESD) 稳健性以及在 TXD 接地短路情况下所需的安全行为在汽车设计中。
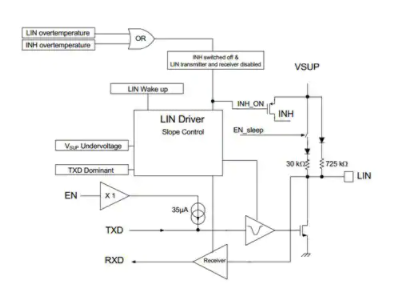
图 :将飞思卡尔的 MC33662 接口连接到 LIN 网络。
MC33662 在 7.0 至 18 V DC 的电源电压下运行,工作电压高达 27 V DC,并在负载突降期间处理 40 V,因此它可以直接从车辆的电源轨供电,但支持 5.0 V 和 3.3 V 兼容数字无需任何所需外部元件的输入;本地和远程唤醒能力由 RXD 引脚报告。
LIN 驱动器是具有内部过流热关断功能的低侧 MOSFET。集成了具有串联二极管结构的内部上拉电阻,因此从节点中的应用无需外部上拉元件。一旦器件进入正常模式,LIN 发送器将能够发送第一个显性位,并且接收器将被启用。
同样,迈来芯TH8080是一种用于单线数据链路的物理层设备,能够在不需要高数据速率的应用中运行,而较低的数据速率可以降低物理媒体组件和使用网络的微处理器的成本。
由于 TH8080 在隐性状态下的电流消耗非常低,因此它适用于对待机电流有严格要求的 ECU 应用,因此不需要微处理器的睡眠/唤醒控制。
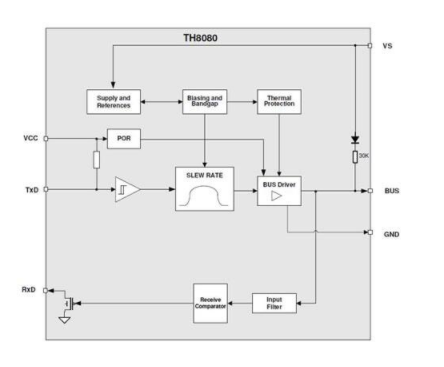
图 :控制 Melexis TH8080 LIN 接口收发器。
收发器由一个具有转换速率控制、电流限制的总线驱动器以及接收器中的一个高压比较器和一个去抖动单元组成。隐性总线电平由与二极管串联的集成 30 kΩ 上拉电阻产生。该二极管可防止 VBUS 在 VS 和 BUS 之间的电压差(VBUS》VS)期间出现反向电流。在 LIN 从节点中使用 TH8080 无需额外的终端电阻。如果该 IC 用于 LIN 主节点,则 BUS 引脚必须通过与 VBAT 二极管串联的外部 1 kΩ 电阻端接。
对于更高的集成度,STMicroelectronics 的SPC560P44等器件将 FlexRay、CAN 和 LIN 控制器组合在一个芯片中,该芯片可用作具有灵活交叉开关和模数转换器块的 PowerPC 内核的多种功能的集线器。这也可以作为 ECU 设备来集成来自 LIN 和 CAN 上的多个传感器的数据。
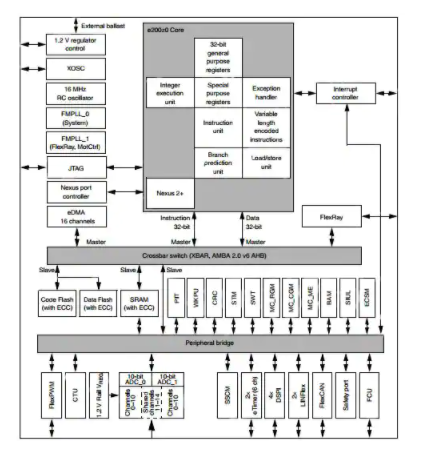
图 :SPC560P44 将 CAN、LIN 和 FlexRay 接口结合在一个设备中。
FlexCAN 接口块用作根据博世规范 2.0B 版实现 CAN 协议的通信控制器。CAN 协议主要用作车辆串行数据总线,满足该领域的特定要求:实时处理、车辆 EMI 环境中的可靠运行、成本效益和所需带宽,支持 32 个消息缓冲区。 第二个 CAN 控制器以高比特率运行,用作安全端口。安全端口 CAN 模块使用 CAN 模块之间的直接连接,在 60 MHz CPU 时钟下提供高达 7.5 Mbit/s 的比特率,因此无需物理收发器。
LIN 网络更适合传感器的需求。SPC560P44 中的 LINflex 接口可作为主机或从机,以最小的 CPU 负载高效管理大量 LIN 协议消息,支持通常为 10 或 20 Kbit/s 的数据速率。如果有数字输出,传感器可以通过 ADC 或 UART 轻松连接。
结论
对于许多更简单的传感器,LIN 接口是将数据传回电子控制单元的最有效方式。在汽车周围添加更多传感器正在开辟新应用并更多地利用 LIN 总线,无论是使用单个收发器还是使用传感器集线器。









 工商网监
工商网监
评论