 电子发烧友App
电子发烧友App


智能驾驶发展趋势
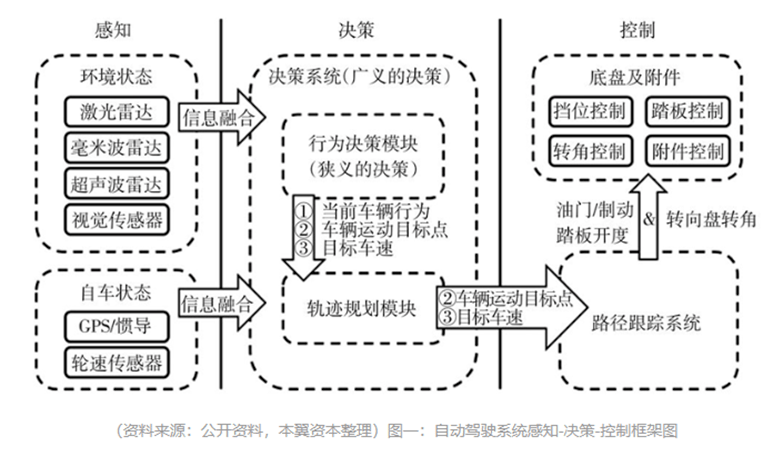
自动驾驶技术分为多个等级,不同机构提出过多钟分级标准,目前业界常用的两种分级标准是NHTSA分级(美国高速公路安全管理局提出)和SAE分级(美国汽车工程协会提出)。两种分级在具体数据划分方面存在差异,但是在特征描述方面存在共性,从L3级开始,驾驶主角均由驾驶员操作转换为车辆自主驾驶。由此,L3级成为自动驾驶技术应用的重要分水岭。

目前来看,我国量产乘用车自动驾驶等级正在由L2向L3+过渡。得益于硬件平台和软件算法逐步成熟,新车搭载L2功能正在逐渐成为前装标配。据统计,2022年我国在售新车L2和L3的渗透率分别为35%和9%,预计2023年将达到51%和20%。部分科技公司直接研发L4级自动驾驶,并在部分城市路段或特定场景下进行测试。但目前高级别自动驾驶仍然面临着政策法规、安全性、技术成熟度等众多挑战亟待突破。据统计,2022年我国L4渗透率为2%,预计2023年将达到11%。
与此同时,限定场景下的商用车自动驾驶率先进入商业化阶段。这主要由于商用车对价格的敏感度更低,B端付费意愿更高,加之场景交通复杂程度较低以及政策鼓励与放开,使得商用车在成本、市场、技术、法规等方面具有更好的落地性。目前,在矿区、港口、干线物流、机场、物流园区等细分场景,高级别自动驾驶正在孕育新市场。
各类玩家以不同发展思路参与市场竞争,推动供应链和产业格局剧烈变化。自动驾驶领域市场参与者众多,包括传统车企、造车新势力、互联网/科技公司等,各类玩家结合自身定位和能力优势,呈现出不同的发展思路。
主机厂方面,国际巨头多采取稳扎稳打的发展策略和渐进式技术路线。主要依赖传统Tier1方案,部分投资初创公司或组建内部团队。国内主机厂处于多方向探索阶段,强势主机厂在独立自研基础上采购供应商方案作为补充,并投资芯片和算法公司,与互联网巨头合作等;小型主机厂研发能力较弱,通常选择与大厂合作,以确保在自动驾驶领域不落人后。造车新势力则将自动驾驶视为核心技术优势,通过自研算法、芯片等掌握自动驾驶核心能力。
互联网/科技公司凭借人工智能算法和软件技术优势进入自动驾驶领域,与车企形成分庭抗礼之势。互联网巨头通过投资、孵化或直接组建团队而成立自动驾驶业务单元,跨界进入市场;部分科技公司以自研芯片为基础,向下游延伸,提供全套算法软件及硬件产品;部分科技公司以高阶自动驾驶解决方案和Robotaxi为主营业务场景,同时利用算法优势切入L2量产领域;亦有部分解决方案提供商聚焦于低速、封闭场地或干线物流等特定场景,或专攻政府车路协同示范区场景,寻求多种模式的商业化落地应用随着自动驾驶高速发展,传统汽车产业中的主机厂和Tier1之间的关系也在发生变化。“大包大揽”的Tier1受到造车新势力的冲击,新势力对自动驾驶相关软硬件技术有着强烈的垂直一体化预期。同时,在汽车缺芯、地缘政策等因素影响下,部分主机厂开始选择和芯片等核心零部件供应商建立直接合作关系,这一关系改变进一步加剧了Tier1的经营压力。与此同时,在L1向L2升级的辅助驾驶市场,本土Tier1供应商开始崛起。
在自动驾驶解决方案方面,存在单车智能和车路协同两种路线。单车智能通过摄像头、雷达等传感器和高效准确的算法,赋予车辆自动驾驶能力;车路协同通过人、车、路信息的全面感知,发挥协同配合作用,让人车路云高度融合,打造“聪明的车+智慧的路”。
这两种路线并非二元对立,而是相辅相成,互为补充。单车智能是实现自动驾驶的基础,即使在以车路协同为主的技术方案中,单车智能也不可或缺。一方面,在路侧智能设施未覆盖或出现故障时,单车智能可以作为冗余与备份系统让车辆安全可靠地完成行驶任务;另一方面,单车智能也可以作为车路协同的终端触手,辅助进行系统升级和新功能开发。而在复杂的交通环境下,车路协同能够通过这能路侧设备为自动驾驶车辆提供具有安全独立性的 数据冗余感知系统,增加感知视角,提升自动驾驶的安全性和可靠性。
在技术可行性之外,参与者话语权、准入门槛、商业化落地难度等也是市场参与者决定采取何种路线的重要考量因素。乘用车是道路上的主要交通工具,也是自动驾驶系统的重要载体。目前,主机厂和自动驾驶解决方案提供商多选择单车智能的技术路线,通过自动泊车、自适应巡航等L2+功能为人们带来人机共驾的体验感,让技术自主可控的同时,获取商业利润。如特斯拉的FSD、小鹏的NGP、蔚来的NOA等都是主机厂践行单车智能路线的代表。
而在2B的部分封闭和半封闭场景,以及2G的城市公共服务场景,车路协同通过对规模化基建改造分摊感知和计算成本,并持续对城市基础设施进行投资和维护,依托经济优势和产业发展带动效应迎来商业化契机。
智能驾驶产业链
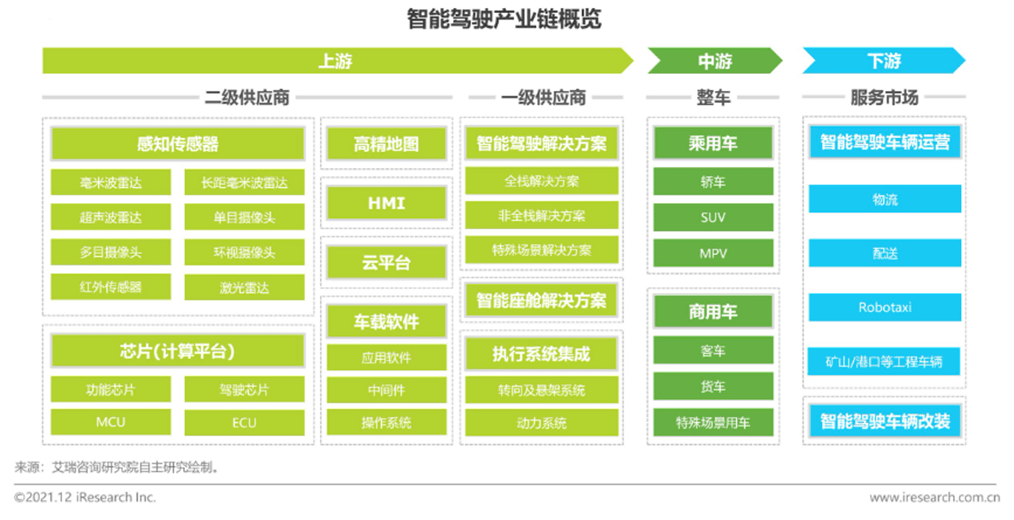
全球智能驾驶产业链逐渐成熟, 上游主要由各类传感器、芯片、算法、高精地图等产业组成。处于 中游的主机厂通过自主研发或合作研发的方式不断开发智能驾驶产品并制定研发计划。由于智能驾驶技术升级和运营而衍生出的服务市场将在产业链中占据愈加重要的地位,车辆逐渐拥有更加自主化的驾驶能力,无人配送车、无人网约车运营及工程车辆的运营和改装将帮助企业在运输环节降本增效。
车载摄像头核心技术分析
车载摄像头被誉为“自动驾驶之眼”,是ADAS系统、汽车自动驾驶领域的核心传感设备。主要通过镜头和图像传感器实现图像信息的采集功能,可实现360°视觉感知,并弥补雷达在物体识别上的缺陷,是最接近人类视觉的传感器。
车载摄像头构成
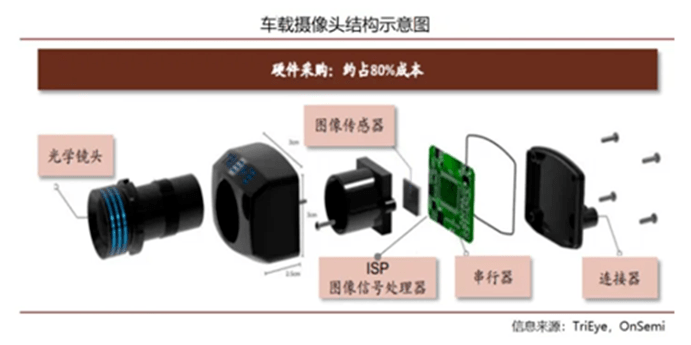
从车载摄像头方案来看,核心硬件主要包括镜头组(光学镜片、滤光片、保护膜)、图像传感器、图像信号处理器、连接器等。
车载摄像头分类
按摄像头是否具备算法功能分类:目前部分车载摄像头(如BMW X5采用采埃孚 S-Cam4 三目摄像头)具有Mobileye EyeQ4处理器,可以实现视觉处理功能;另外一种方案(如特斯拉三目摄像头)则剥离了计算功能,车载摄像头只做图像采集,此种方案的优势在于成本相对传统方案下降60%左右。
车载摄像头工艺
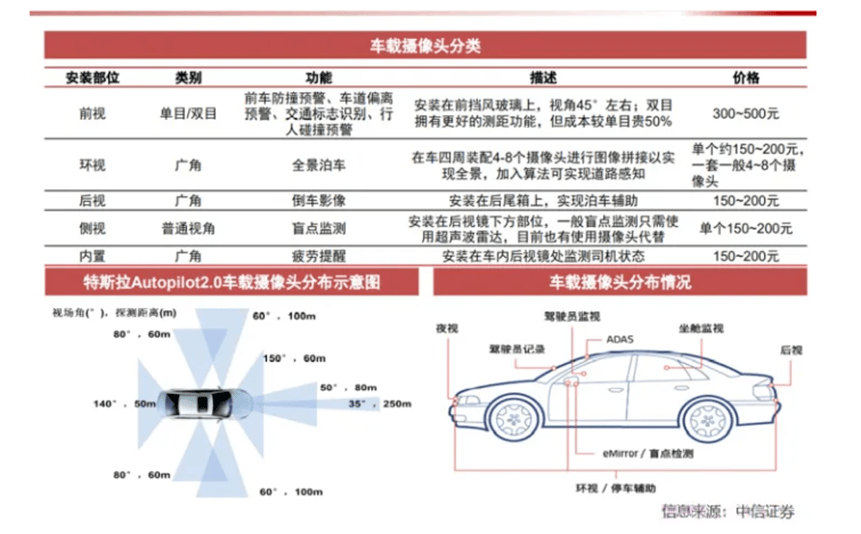
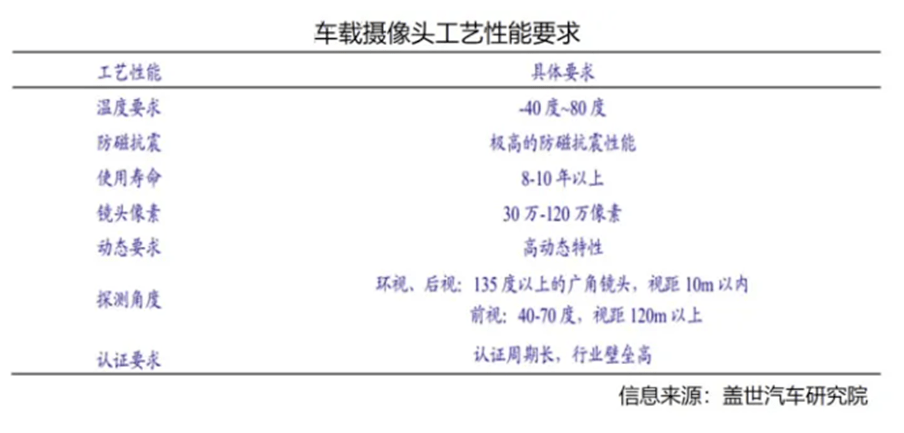
与工业摄像头和手机摄像头相比,车载摄像头需要在高低温、湿热、强微光和振动等各种复杂工况条件下保持稳定工作状态,因此车载摄像头具有更高的安全等级和工艺性能要求。考虑到安全因素,汽车厂商倾向于选择技术成熟、品质有保障的零部件厂商,车载零部件厂商进入市场体系获得评级需要更长的认证周期,行业壁垒较高。在性能方面,目前车载摄像头像素要求不高,一般为30-120万像素;但车载摄像头对探测角度和范围有更高的要求,环视和后视一般采用135度以上的广角镜头,前视摄像头为40-70度。总体而言,车载摄像头具有较高的技术壁垒。
主流厂商车载摄像头搭载方案
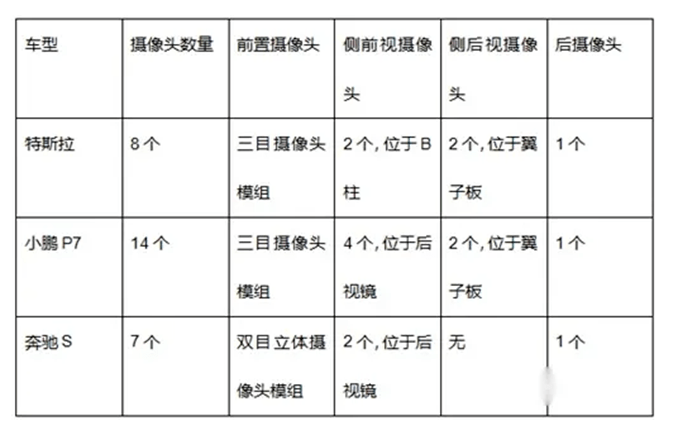
从方案中我们可以看到,特斯拉的8个摄像头均与行车系统有关联,这与其一直宣传的不依靠激光雷达纯视觉的自动驾驶方案是有较大关联的,特斯拉的这一套方案的最大优势就是:高性价比。特斯拉用了成本非常低的自研 1.2MP 摄像机就实现了L2+级别的自动驾驶。
小鹏P7使用了多个摄像头,这一套方案的最大优势就是:可拓展性较强。前期方案在设计时需要提高硬件成本,但是在后期 OTA 升级后,其自动驾驶功能具有非常好的兼容性和可拓展性。通过这套传感器模型,小鹏实现了具有较好体验的L2+级别的自动驾驶功能,包括小鹏极具特色的高速自主导航驾驶(NGP)和停车场记忆泊车功能。
奔驰S级是传统主机厂方案的代表,双目立体摄像头方案是奔驰S级最大的优势。相比于单目摄像头,双目摄像头可以计算当前检测目标在 X、Y、Z 坐标下的运动情况,判断检测目标的姿态及目标类型,奔驰在 L2 级别的 ADAS 功能的体验效果也比另外两家好一些。
来源:百度搜索
车载摄像头产业链
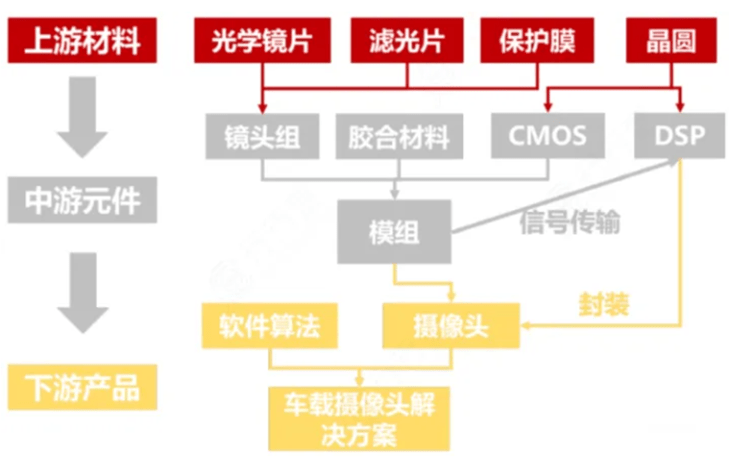
车载摄像头产业链主要涉及上游材料、中游元件和下游产品三个主要环节。
上游材料中光学镜片、滤光片和保护膜等用于制造镜头组,晶圆用于制造CMOS芯片和DSP信号处理器;在中游镜头组、CMOS芯片和胶合材料等组装成模组,并和DSP信号处理器封装成摄像头产品。
在产业链的这一层,上游供应商已经可以向下游整车或一级供应商客户供应完整的摄像头产品。在车载摄像头产业链中,摄像头和软件算法一起,构成车载摄像头解决方案,应用于自动驾驶汽车中。
目前车载摄像头市场份额较大的公司均是全球领先的一级零部件供应商,下游客户基本覆盖了全球主要的整车公司。
来源:知乎-智驾最前沿
CMOS在车载摄像头价值量成本占比最高,达到52%;模组封装占比20%、光学镜头占比19%。
CMOS图像传感器
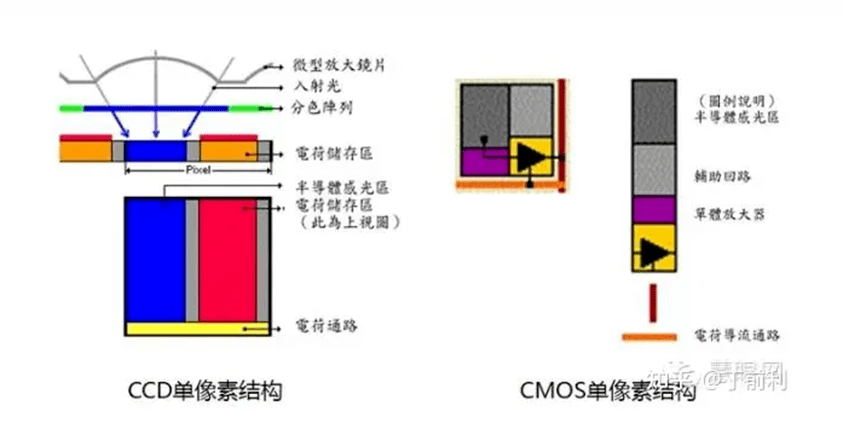
图像传感器主要分为CCD图像传感器(Charged Coupled Device Image Sensor,电荷耦合器件图像处理器)和CMOS图像传感器(Complementary Metal-Oxide-Semiconductor Image Sensor,互补金属氧化物半导体图像传感器)两大类,CMOS已经成为图像传感器市场的主导产品。两者的主要区别在于二者感光二极管的周边信号处理电路和对感光元件模拟信号的处理方式不同。CCD图像传感器中感光元件接受的模拟信号直接进行依次递减,在感光元件末端将所传递的模拟信号统一输出,并由专门的数模转换芯片及信号处理芯片进行放大、数模转化及后续数字处理,CCD图像传感器具有高解析度、低噪声等优势,但生产成本相对较高,主要用于专业相机、摄影机等设备。而CMOS图像传感器中每个感光元件均能直接集成放大电路和数模转化电路,无需进行依次传递和统一输出,再由图像处理电路对信号进行进一步处理,CMOS图像传感器具有低成本、功耗小等特点,且其整体性能随着产品技术的不断演进而持续提升。
CMOS与CCD最大的差别是:放大器位置和数量比较CCD和CMOS的结构,放大器的位置和数量是最大的不同之处。
CCD 每曝光一次,自快门关闭或是内部频率自动断线(电子快门)后,即进行像素转移处理,将每一行中每一个像素(pixel)的电荷信号依序传入“缓冲器”(电荷储存器)中,由底端的线路导引输出至 CCD旁的放大器进行放大,再串联 ADC(模拟数字数据转换器)输出。
来源:知乎-阿宝说车
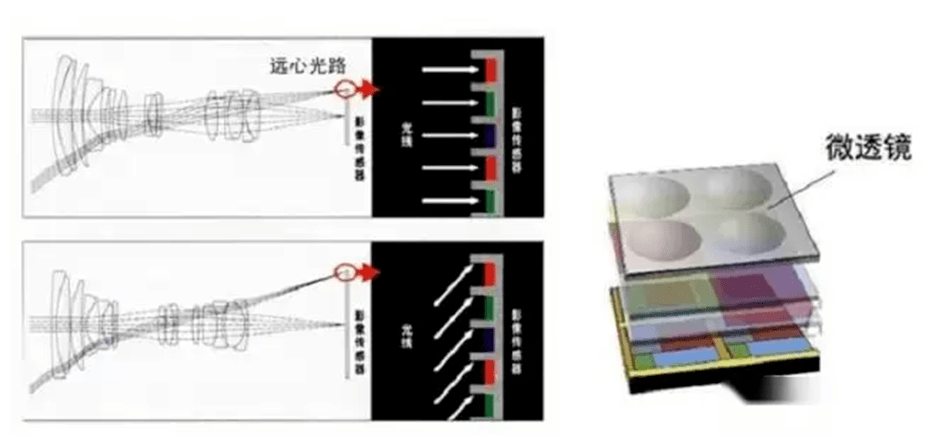
由于光线进入各个单像素的角度不一样,因此在每个单像素上表面增加了一个微透镜修正光线角度,使光线垂直进入感光元件表面。这就是芯片CRA的概念,需要与镜头的CRA保持在一点的偏差范围内。
来源:知乎-阿宝说车
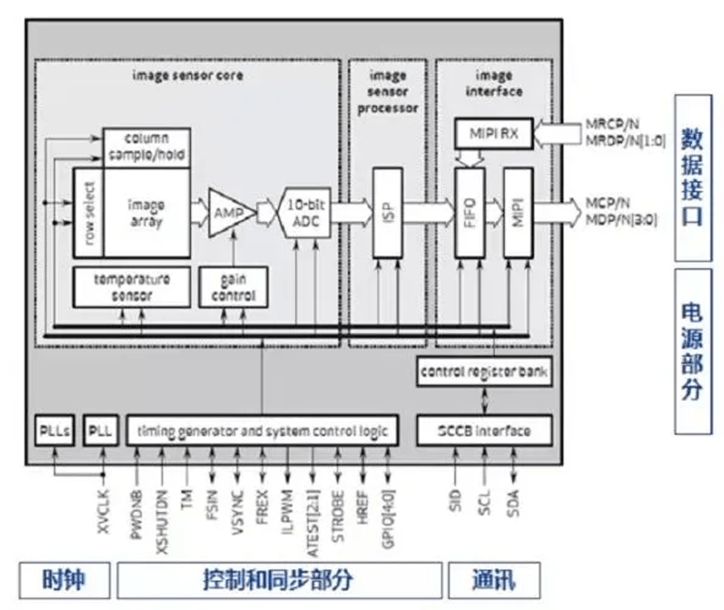
电路架构上,我们加入图像传感器是一个把光信号转为电信号的暗盒,那么暗盒外部通常包含有电源、数据、时钟、通讯、控制和同步等几部分电路。可以简单理解为感光区域(Pixel Array)将光信号转换为电信号后,由暗盒中的逻辑电路将电信号进行处理和一定的编码后通过数据接口将电信号输出。
来源:知乎-阿宝说车
镜头
一个摄像头效果好不好,70% 的光学参数是由镜头决定的,虽然从单价上来说没有COMS芯片贵,但是性能上是非常重要的。
镜筒的材质一般都是金属,但是也有塑胶的,金属的镜筒从质量,耐高低温等各项指标都会更好,但是也有缺点,金属的套筒在螺丝扭的时候会产生金属机械粉末,会有掉入到COMS感光区域的风险,而且金属的套筒硬度比较硬,底板打螺丝的时候容易导致底板有COMS芯片的PCBA变形,从而导致成像后的解析度发生变化。
镜头的材质主要是两种,一种是玻璃,一种是塑胶。玻璃镜片:以G为缩写,面型多为球面,玻璃研磨加工;塑胶镜片:以P为缩写,面型多为非球面,注塑加工。
手机摄像头为追求轻薄短小,多为1-4pcs的玻璃镜片或塑胶镜片组成的定焦镜头。如2P,3P,3G,1G1P,2G2P等。
镜头的材质车载里面一般都是使用的是玻璃,玻璃的耐高温,耐擦挂性能都非常好,表面硬度玻璃会好于塑胶,当然玻璃也有缺点,价格贵,而且摄像头整体的厚度变厚了,但是在车载里面这些相对于性能要求而言,都必须要使用到玻璃镜头。
车载摄像头技术趋势
消除杂光鬼影,提升光学成像稳定性
随着车载摄像头工艺的优化与升级,车载摄像头抗震、耐磨、耐高温低温能力逐渐提高,画质更加清晰。为了控制车大灯等正面强光干扰引起的鬼影杂光、在极端温度或短时间快速温差变动的状况下保持光学成像稳定性以及有效捕捉和分辨物体细节,除了从软件上提升算法外,车载镜头厂商也在积极地通过改进镀膜工艺、提高技术参数以及在镜头外增加导电加热膜等方式,不断推动车载镜头产品整体的技术进步。
像素升级:800W像素摄像头
车载摄像头感知的核心是视觉,而分辨率决定了视觉的高下。随着ADAS功能对感知距离需求的提升,感知内容方面的更精细,分辨率更高的摄像头大势所趋。对于主流的新能源车企来说,120W到200W的镜头已经不再满足使用,行业开始升级到800W像素。
车载摄像头要求具有高耐用性和热稳定性。按材质来分,车载摄像头的镜片可由玻璃、塑料制成。玻璃镜片具有高耐用度和防刮伤性,且温度性能较好,因此更多用在高端产品中。而塑料镜片价格便宜但是成像效果差,且在汽车恶劣的使用环境中容易造成镜片变形,影响成像质量。目前,综合考虑成本和性能,主流厂商车载镜头正逐渐开始使用玻塑混合镜头为主,部分高端镜头采用全玻璃方案。
镜片工艺:非球面镜片
球面镜片会导致像差问题,即从镜片中央射入的光线与镜片边缘射入的光线的焦点不一致,进而造成成像模糊的问题。球面镜片需要多枚镜片组合来减小像差。
非球面镜片是由球面和平面以外的曲面组成的镜片,通过改变镜片的曲率,使光线汇聚在固定的焦点,解决了像差的问题,且仅需一枚镜片就可实现。因此,非球面镜片具有小型化、轻量化和成像效果佳的优势,已经成为高像素车载镜头的最佳解决方案。
塑料非球面镜片采用注塑生产实现,而玻璃非球面镜片是采用优质的光学玻璃,利用精密控制的热模压技术进行生产的产品。
自清洁以及防雾除霜
自清洁防污:目前主流厂商至少会在车载摄像头的镜头表面镀一层疏水涂层,一方面可以有效通过喷水清洗等手段去除脏污。每当遇到雨雪天气,暴露在车外的摄像头甚至还会出现起雾结霜的问题。
防雾除霜:目前业界有两个方向,一是通过镀膜,镜头外表面镀疏水膜,镜头内表面镀亲水膜;二是采用加热方案,或是镜头整体加热,或者是镜头表面做一层透明导电膜实现加热。
AA封装
车载镜头组装需要高精度的AA技术。车载摄像头模组的封装需要经过多次装配,误差叠加将导致产品良率下降。AA技术使镜头与CMOS图像传感器的相对位置自由可调,还可以通过实时采集分析成像数据,调节水平位置以及镜头的倾斜角度,从而保证图像的清晰度,并保证光轴与像面的焦点处于图像中心。
随着车载摄像头分辨率的提升,镜头与CMOS 间的定位精度的要求也不断上升。因此,AA设备的技术含量将影响各组件的机械工差修正,进而影响摄像头成像质量以及产品的一致性。
在车载摄像头领域,现阶段AA设备带来的资本投入非常大,比如说进口的AEI、ASM等。而随着国内设备厂商的成长,比如说:中科精工、华亚智能、艾微视、德赛自动化、广浩捷科技、天准、舜宇等。AA设备的成本也将会有一定下降。
夜视技术
为了保障行车安全,汽车ADAS功能需要尽量实现全天候运转。摄像头是通过感光与算法实现对周边环境感知,因此在光线不足如夜间行车、过隧道等场景下,需要增强摄像头的夜视能力。目前汽车夜视系统按成像原理与镜头不同可以分为三类:微光、近红外以及远红外。
微光:从字面意义理解,是通过放大接收到的少量可见光,最终将图像采集并投射到相应显示屏上。微光跟一般摄像头的成像原理一致,都是通过可见光实现夜视,但需要一定的可见光环境。
近红外夜视:也有称为主动红外夜视技术,是指工作时用较强的红外发射源照射目标,利用目标反射回来的红外线来得到物体的像。工作波段在800~1000nm的近红外光。
远红外夜视(热成像系统):也有人称之为被动红外夜视技术,主要是利用物体自身发出的红外辐射来成像,这也就是大家所说的热成像。热成像系统是基于目标与背景的温差而形成的红外发射率的差异,利用辐射测温技术对目标逐点测定辐射强度,而形成可见目标的热图像。其理论工作波段在1-14um之间,但一般远红外夜视主要使用短波 (3μm -- 5μm)与长波 ( 8μm --14μm)这两种 。
其中,微光夜视需要从CMOS与算法上去提升实现;而红外夜视则需要配备专门的红外镜头确保红外光的进入。此外微光夜视可以看到彩色画面,而红外则无法做到彩色。
随着汽车智能化的不断演进,对车载镜头提出了快速感测并深度辨识车身周边环境的需求。车载镜头需要在对环境信息进行解读的同时同步实现景深测量的效果,而作为3D感测主流技术方案的结构光、TOF 技术等已成为各大车载镜头厂商技术攻关的热点。
编辑:黄飞












 工商网监
工商网监
评论