小熊派Hi3861获取mpu6050数据在oled屏幕中显示
2023-08-14 14:39:35 1099
1099 
我现在用手机通过HC05蓝牙模块实现了对遥控车的控制,现在要在这个基础上增加一个MPU6050模块,我想把这个MPU6050模块的姿态数据通过HC05蓝牙模块在手机上显示出来,我用的野火
2023-10-07 08:02:38
mpu6050是一个六轴传感器包括三轴陀螺仪和三轴加速度,分别可以测得三轴的角速度、加速度。但是一般传感器的原始数据都不能直接直接拿来用,都需要滤波和姿态融合解算。对于初学者来说卡尔曼滤波和姿态融合
2022-02-10 06:25:15
MPU6050姿态解算的原理是什么?MPU6050姿态解算的程序该如何去是实现呢?
2021-12-17 07:14:26
一、MPU6050简介MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,利用自带
2022-02-10 06:15:57
大家好,我最近在做毕业设计,题目叫做《基于Mems传感器的运动目标姿态识别系统(硬件部分)》,任务书要求求出姿态角,转矩,还有位移,然后我就用的是MPU6050来测角加速度,然后就是测不出线加速度
2016-04-25 21:10:07
前言MPU6050具备中断寄存器,有助于精准获取数据。本文将使用STM32配置FIFO中断,并控制中断时间。如果对于MPU6050还存在其他问题可参考另一篇文章。MPU6050常见问题的分析与处理
2022-02-10 06:37:21
最近在试着做做风力摆,我用TB6612模块控制空心杯电机转动时出现了严重的问题,在空心杯电机接入到TB6612模块四个口时,通过PWM控制它的转速,但是MPU6050就无法读取姿态数据了,完全失控了
2017-04-14 17:31:32
MPU6050 加速度传感器模块
2023-03-28 13:06:19
下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏
2021-08-09 07:17:09
MPU6050模块自己写 卡尔曼滤波和姿态解算 难吗? 大概多久能搞出来?
2017-12-22 17:35:23
文章目录前言一、MPU6050是什么?二、使用步骤1.引入库2.读入数据总结前言一、MPU6050是什么?MPU6050是一款性价比很高的陀螺仪,可以读取X Y Z 三轴角度,X Y Z 三轴加速度
2022-02-10 07:22:09
写在最前面,这篇博客写到的姿态解算是由DMP硬件完成的,介绍了底层驱动,重点例举了MPU6050的初始化函数,加速度计,陀螺仪原始数据的读取函数,设置传感器的量程范围,采样频率函数。下一篇博客,我会
2022-02-10 07:46:19
MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2022-02-10 07:02:46
各位大神,我使用mpu6050时遇到的一个问题,单独的驱动mpu6050时可以输出正确的四元数,但是利用读出的数据控制两组电机旋转时输出的数据在几乎不变;折腾一番发现只有控制B组电机旋转时MPU6050工作才会异常,但是两组电机的控制函数几乎一样啊,实在弄不懂是哪里出了问题
2017-07-28 12:00:08
mpu6050向arduino传输数据,matlab通过串口再读取传感器数据。由于每次启动传感器会重新校准,导致每次传感器测得同一姿态、同一位置x y两个方向角的初始值都不一样,这就造成很大的麻烦
2021-08-05 11:00:28
一,mpu6050模块基础(参考HAL库开发指南)二,CUBEMX配置用模拟IIC,只需要打开一个串口打印数据就行,IO口的配置直接写在板级支持包的init里了三,keil中代码(参考正点原子与博客
2022-02-10 07:14:08
过程 -------------------------------------------------------------可能有些说明不对的地方,请大家一定要提出来提出来,共同学习 .共同进步.–>>>本文章HAL库编写MPU6050输出六轴原始数据,移植DMP输出自身姿态角程序链接程序链接程序链接目录一、mpu6050的通信方式二、CubeMX
2022-02-10 07:01:20
如题,我在用互补滤波和四元数算法解算mpu6050的角度姿态。但是现在的问题是,一旦我的mpu6050转动速度一快,输出的数据就会出现问题。如下图.前面3栏,分别是xyz的角度。转动的速度一大,就输出nan。这是为什么?谢谢大神解答!
2015-05-09 18:33:41
HAL库 && MPU6050HAL库 MPU6050的使用:今天在本教程中,我们将使用STM32接口MPU6050(GY-521)加速度计陀螺仪。同时,我将在PC上利用串口显示这些
2021-07-20 07:13:02
目录GY-521MPU6050 介绍陀螺仪加速度计陀螺仪和加速度计的关系,姿态解算融合的原理硬件从机地址部分参考STM32—驱动六轴MPU6050输出欧拉角GY-521MPU6050 介绍关于
2022-02-10 07:45:15
下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏自动...
2022-02-10 06:01:07
]效果图:接线:SDA–PB11SCL–PB10用正点原子的MPU6050案例库主函数改为:#include "led.h"#include "delay.h"
2022-02-10 07:45:58
STM32读取MPU6050角度数据OLED显示 STM32F103C8T6读取陀螺仪MPU6050的角度数据,使用6050自带DMP库姿态解算出各个方向的角度,并使用OLED实时刷新显示,同时可以
2022-02-10 06:33:45
欧拉角来定义,欧拉角包含pitch(俯仰角)、yaw(偏航角)、roll(横滚角),如下图示意:二、代码实现功能描述Core采集MPU6050六轴传感器经过姿态解算后的欧拉角数据,并在电脑串口终端打印出pitch(俯仰角)、yaw(偏航角)、roll(横滚角)这三个角度的整数部分以方便用户实时观察传感器模
2022-02-10 07:42:40
stm32f103c8t6使用MPU6050的DMP库进行姿态解算
2023-01-24 17:45:27
今天测试一下6轴加速度传感器MPU6050,主要验证库文件能否兼容我的模块。首先打开在线编程公有库找到MPU6050并复制到自己的私有库里。然后新建一个工程:打开工程后在工程中添加已经保存的库
2017-06-12 23:19:24
。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。Wire库的官方文档
2021-01-28 09:52:28
、实验总结通过此实验已经完美的获取了MPU6050六轴陀螺传感器的数据读取,姿态解算的方法,同时结合COF屏完美的展示了MPU6050姿态的可视化。在实验测试中,COF屏在完成负载的仪表界面显示时,依然
2022-04-11 01:08:47
连接到一个三轴磁力计,MPU6050 能提供一个完整的九轴融合输出到其主 I2C 端口。 二、调用开源库驱动 新建工程example06_mpu6050 2.1 添加依赖 修改
2023-03-28 14:46:13
使用MPU6050硬件DMP解算姿态是非常简单的,下面介绍由三轴陀螺仪和加速度计的值来使用四元数软件解算姿态的方法。我们先来看看如何用欧拉角描述一次平面旋转(坐标变换):MPU6050的四元数解算
2022-02-10 06:20:09
最近在实验mpu6050,遇到2个问题。1、在初始化之后,读取mpu6050的地址时,会出现地址为0的情况;2、第一次读取地址为0x68时,读取数据全为0,然后Reset后会出现一组数据。每隔1s
2016-08-09 09:32:59
摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。本问主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及
2022-02-10 07:00:37
基于Stm32CubeMX下Mpu6050模拟IIC的Dmp的移植一、问题背景以前熟悉的是在标准库下移植Mpu6050的DMP,获取航向角等等。现在要HAL库下移植MPU6050的DMP库。先分析
2022-02-10 06:08:06
想要获得MPU6050的姿态角数据,从mpu的数据手册上看到有dwp功能可以快速获得四元数及欧拉角。但是从mpu6050的fifo中读出的数据不对。我是参考http://bbs.cmnxt.com/thread-13197-1-1.html写的代码(不是用的库函数)。有没有大虾能都指导一下不用dwp的库函数如何正确读出fifo中的内容。
2014-03-05 13:24:36
使用MPU6050 dmp固件库时候报错:MPU6050固件库加载,最后运行到 “memcmp(firmware+ii, cur, this_write)”无法通过!1、硬件连接是否有问题、芯片是否
2022-02-10 06:56:22
MPU6050SAMD主控IIC这些天在做角度及姿态等方面的工作,用的MPU6050姿态芯片。其中主控用的SAMD系列芯片。硬件已经完成,调试程序中,用的硬件IIC,出现一个状况,就是占用flash
2022-02-10 06:15:55
的姿态。MPU6050自带DMP解算库,可以直接将我们的原始数据转换成欧拉角,但是他是非开源的,并且还是针
2022-02-10 07:04:56
玩四轴的都知道, MWC V2.5 飞控主板,板载陀螺仪传感器就是MPU6050.(不信你可以拿放大镜看). 而默认的MWC开源程序是自己读取MPU6050的原始数据,经过,自己的一套算法.算出来四
2022-02-10 07:38:06
怎样去获取STM32 MPU6050模块的数据呢?怎样去完成MPU6050的零偏自动设置及零漂抑制呢?
2021-11-15 08:04:37
MPU6050的DMP自检与姿态换算的问题
2022-02-10 07:51:33
RT,最近要做一个头戴式设备,,其中要获取使用者的头部动作数据,用MPU6050来获取是否合适?在可穿戴领域是否有更适合的传感器?求大神指导,不胜感激~
2015-03-28 22:09:13
求教下各位大神,我在用MPU6050解算姿态的时候,得到的ROLL始终有问题。通过匿名上位机来观察,平放静止时,得到的ROLL始终在180度左右,左右动一下,就在+180度左右或者-180度左右变化
2018-03-27 09:18:18
MPU6050有软件解算姿态和DMP解算姿态,他们各自的优缺点是什么呢?因为大家都知道的是DMP可以减轻MCU的负担,但我看了好几个微型四轴开源飞控的选择都是用软件解算,什么理由呢?
2019-05-29 04:36:05
在做飞行器的时候是怎么解决mpu6050自检不准确的,如果mpu6050倾斜这放着自检,初始化完成后计算出的几个姿态也会不准确,网上找了一些资料说是要加磁阻才行……但是我看好多市面上卖的四轴都是用
2019-06-14 04:35:59
论坛上有人玩过平衡小车或者四轴吗,想问下怎样用mpu6050姿态解算之后的数据与pid算法结合控制平衡小车还有如果有pid资料的大神,能发在帖子上吗,先谢谢了
2019-02-25 08:15:52
想要一个stm32f103c8t6控制mpu6050姿态传感器的底层驱动程序
2019-08-05 04:35:54
我想要一个mpu6050姿态解算欧拉角的完整程序
2019-08-01 04:35:57
谈一谈 MPU6050 姿态融合
2020-05-05 09:28:07
前段时间基于KL26采用模拟IIC方式撸了下MPU6050,并读取了其原始的数据,今天抽时间吧MPU6050的DMP运动库也移植上去了,直接上代码,下一季将是卡尔曼滤波,敬请期待~
2016-08-16 09:48:04
mpu6050详细源码,配有电路图以及初始化C语言程序。详细的mpu6050中文资料!
2016-02-18 11:53:20 98
98 MPU6050原理图,PDF格式,还蛮清晰。
2016-03-24 17:25:37108 MPU6050使用卡尔曼滤波的方法介绍,使用卡尔曼滤波获得的姿态角更准确
2016-06-01 11:29:200 本程序是基于Mpu6050,所做的四元数结算 相当稳,希望对大家有所帮助
2016-08-17 10:36:5590 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3071 最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,运算量相对较大),方便在STM32主控上实现,可以转换成四元数表示。
2017-11-07 10:39:3018851 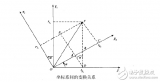
InvenSense公司的三轴陀螺仪MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
2017-11-07 14:01:265743 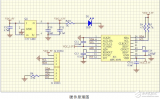
MPU6050模块,如图 1所示。该模块集成了一片MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8
2017-11-07 14:06:4114002 为避免纠缠于电路细节,我们直接使用集成的MPU6050模块。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。
2017-11-07 14:25:066954 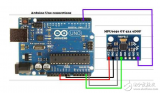
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波算法。
2017-12-11 13:31:4071162 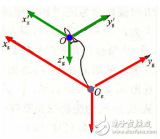
本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比较实用的工程方法。
2017-12-11 13:51:3441795 
本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、DMP姿态解算后的俯仰角、横滚角和航向角。
2017-12-11 14:26:5235036 
本文介绍了mpu6050和mpu3050有什么不同和相同。分别介绍了mpu6050和mpu3050基础以及特点,mpu3050是三轴陀螺传感器,MPU6050内部整合了3轴陀螺仪和3轴加速度传感器。
2017-12-11 15:41:5534849 本文主要介绍了mpu6050对应i2c地址是什么,并通过stm32的硬件读取mpu6050的数据。MPU6050 的 I2C 地址是 0xD0H(11010000B)。I2C从器件有8位的地址,前7位由 WHO AM I确定,第8位由AD0的电平决定。
2017-12-11 16:04:1623368 
针对四轴飞行器姿态信息的实时准确获取问题,对四轴飞行器的姿态解算方面进行了研究。在分析姿态表示的四元数法和欧拉角法基础上,以成熟的Mahony互补滤波算法为例比较了软件姿态解算和基于MPU6050
2018-03-08 09:19:547 本文开始介绍了mpu6500的定义与MPU6500驱动总结,其次阐述了mpu6050的定义与mpu6050感测范围,最后介绍了mpu6500和mpu6050的区别。
2018-03-08 09:54:0289692 本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07:1141148 本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42:3325819 本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57:3171467 
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15:2441958 MPU6050开发 -- 数据分析
2021-11-30 11:21:0422 MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2021-12-06 11:51:1167 移植正点原子mpu6050代码,总是MPU6050初始化失败解决首先观察正点原子MPU6050代码,发现它在读取MPU6050数据的同时,还将数据通过串口发送给上位机进行调试,而我们移植
2021-12-06 11:51:1238 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态
2021-12-06 12:06:0733 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 12:06:080 # MPU6050常见问题的分析与处理本文主要针对STM32使用MPU6050过程中产生的问题进行分析和处理,部分内容也适用于其他单片机。本文基于MPU6050自带的DMP算法。文章内容对于MPU6050调试过程有一定的帮助。
2021-12-06 12:21:0641 使用MPU6050硬件DMP解算姿态是非常简单的,下面介绍由三轴陀螺仪和加速度计的值来使用四元数软件解算姿态的方法。我们先来看看如何用欧拉角描述一次平面旋转(坐标变换):MPU6050
2021-12-06 12:36:0624 前言MPU6050具备中断寄存器,有助于精准获取数据。本文将使用STM32配置FIFO中断,并控制中断时间。如果对于MPU6050还存在其他问题可参考另一篇文章。MPU6050常见问题的分析与处理
2021-12-06 12:36:0714 介绍一个学长做的单片机项目教程:MPU6050姿态解算大家可用于 课程设计 或 毕业设计技术解答毕设帮助:<Q>7468760412 MPU6050MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。由于其体积小巧,功能强大,
2021-12-06 12:51:1013 STM32获取MPU6050数据
2021-12-06 13:06:1648 MPU6050姿态融合解算(DMP)
2021-12-06 13:21:1037 摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。本问主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及
2021-12-06 14:21:0915 STM32 MPU6050 平衡车
2021-12-06 14:51:1061 MPU6050( )
2021-12-06 15:06:1123 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 15:36:096 图五. 接线六.代码说明1. MPU6050引脚配置2. MPU6050模块写数据与命令函数3. MPU6050模块初始化函数4. MPU6050模块基础功能函数七.资料获取一. 实现功能上电后OLED0.96实时显示AX,AY,AZ三轴加速度 GA,GY,GZ三轴角速度二. 硬件清单OLED0.96模块
2021-12-06 16:06:0929 基于Stm32CubeMX下Mpu6050模拟IIC的Dmp的移植一、问题背景以前熟悉的是在标准库下移植Mpu6050的DMP,获取航向角等等。现在要HAL库下移植MPU6050的DMP库。先分析
2021-12-06 16:06:1023 玩四轴的都知道, MWC V2.5 飞控主板,板载陀螺仪传感器就是MPU6050.(不信你可以拿放大镜看). 而默认的MWC开源程序是自己读取MPU6050的原始数据,经过,自己的一套算法.算出来
2021-12-06 16:51:101 MPU6050的DMP自检与姿态换算的问题
2021-12-06 16:51:1116 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏自动...
2021-12-06 17:06:1017 MPU6050数据手册,规格说明
2022-03-09 15:03:5492 ——来自迪文开发者论坛用户本方案使用COF屏的IO口模拟I2C信号与MPU6050通讯,实现航空姿态仪表可视化显示。MPU6050采集数据,T5L0芯片进行数据读取和滤波算法处理,计算出姿态数据
2022-05-31 11:30:30776 
电子发烧友网站提供《MPU6050教程开源分享.zip》资料免费下载
2023-06-25 15:18:146 MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
2023-08-07 15:46:562
 电子发烧友App
电子发烧友App
















 工商网监
工商网监
评论