 电子发烧友App
电子发烧友App


一、摄像头结构和工作原理.
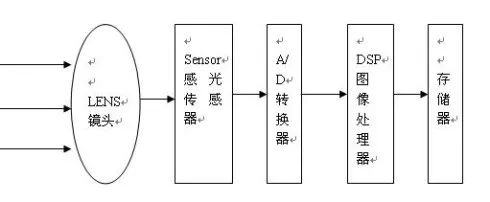
拍摄景物通过镜头,将生成的光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,再被送到电脑中进行处理,最终转换成手机屏幕上能够看到的图像。
数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。DSP结构框架:
1. ISP(image signal processor)(镜像信号处理器)
2. JPEG encoder(JPEG图像解码器)
3. USB device controller(USB设备控制器)
常见的摄像头传感器类型主要有两种,
一种是CCD传感器(Chagre Couled Device),即电荷耦合器。
一种是CMOS传感器(Complementary Metal-Oxide Semiconductor)即互补性金属氧化物半导体。
CCD的优势在于成像质量好,但是制造工艺复杂,成本高昂,且耗电高。在相同分辨率下,CMOS价格比CCD便宜,但图像质量相比CCD来说要低一些。CMOS影像传感器相对CCD具有耗电低的优势,加上随着工艺技术的进步,CMOS的画质水平也不断地在提高,所以目前市面上的手机摄像头都采用CMOS传感器。
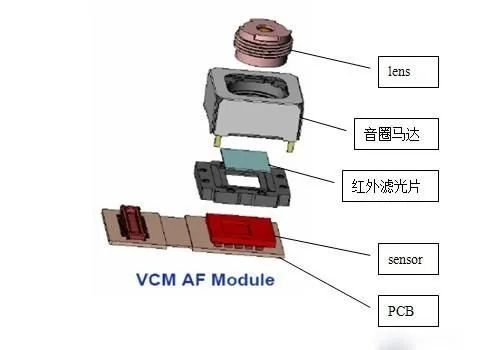
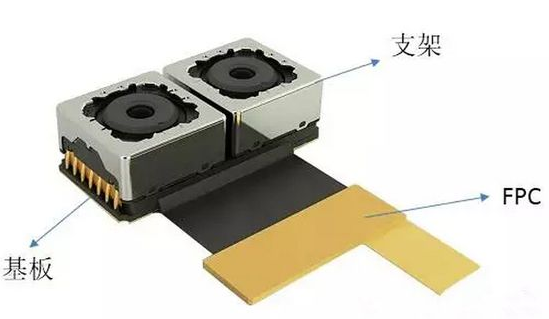
手机摄像头的简单结构
滤光片有两大功用:
1.滤除红外线。滤除对可见光有干扰的红外光,使成像效果更清晰。
2.修整进来的光线。感光芯片由感光体(CELL)构成,最好的光线是直射进来,但为了怕干扰到邻近感光体,就需要对光线加以修整,因此那片滤光片不是玻璃,而是石英片,利用石英的物理偏光特性,把进来的光线,保留直射部份,反射掉斜射部份,避免去影响旁边的感光点.
二、相关参数和名词
1、常见图像格式
1.1 RGB格式:
传统的红绿蓝格式,比如RGB565,RGB888,其16-bit数据格式为5-bit R + 6-bit G + 5-bit B。G多一位,原因是人眼对绿色比较敏感。
1.2 YUV格式:
luma (Y) + chroma (UV) 格式。YUV是指亮度参量和色度参量分开表示的像素格式,而这样分开的好处就是不但可以避免相互干扰,还可以降低色度的采样率而不会对图像质量影响太大。YUV是一个比较笼统地说法,针对它的具体排列方式,可以分为很多种具体的格式。
色度(UV)定义了颜色的两个方面─色调与饱和度,分别用CB和CR表示。其中,Cr反映了RGB输入信号红色部分与RGB信号亮度值之间的差异。而Cb反映的是RGB输入信号蓝色部分与RGB信号亮度值之间的差异。
主要的采样格式有YCbCr 40、YCbCr 42、YCbCr 41和 YCbCr 44。
1.3 RAW data格式:
RAW图像就是CMOS或者CCD图像感应器将捕捉到的光源信号转化为数字信号的原始数据。RAW文件是一种记录了数码相机传感器的原始信息,同时记录了由相机拍摄所产生的一些元数据(Metadata,如ISO的设置、快门速度、光圈值、白平衡等)的文件。RAW是未经处理、也未经压缩的格式,可以把RAW概念化为“原始图像编码数据”或更形象的称为“数字底片”。sensor的每一像素对应一个彩色滤光片,滤光片按Bayer pattern分布。将每一个像素的数据直接输出,即RAW RGB data
Raw data(Raw RGB)经过彩色插值就变成RGB.
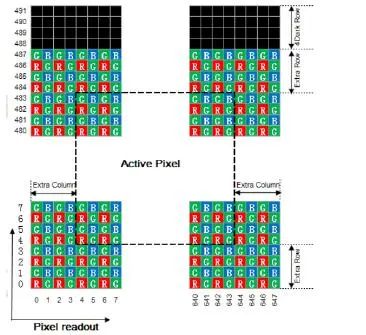
RAW格式图像示例
2. 相关技术指标
2.1 图像解析度/分辨率(Resolution):
SXGA(1280 x1024)又称130万像素
XGA(1024 x768)又称80万像素
SVGA(800 x600)又称50万像素
VGA(640x480)又称30万像素(35万是指648X488)
CIF(352x288) 又称10万像素
SIF/QVGA(320x240)
QCIF(176x144)
QSIF/QQVGA(160x120)
2.2 彩色深度(色彩位数):
256色灰阶,有256种灰色(包括黑白)。
15或16位彩色(高彩色):65,536种颜色。
24位彩色(真彩色):每种原色都有256个层次,它们的组合便有256*256*256种颜色。
32位彩色:除了24位彩色的颜色外,额外的8位是储存重叠图层的图形资料(alpha频道)。
2.3 光学变焦和数码变焦:
光学变焦: 通过镜头的调整,拉近拉远所要拍摄的对象,保持像素不变和画质基本不变,却可以拍到自己 理想的物像。 数码变焦:其实没有什么变焦,只是从原图片中截取出来放大,你从液晶屏幕上看到变大了,实际上画质并没有本质提高,而像素比你相机能拍摄的最大像素降低了。画质上说基本是鸡肋把,但是可以提供一些方便。
2.4 图像压缩方式:
JPEG/M-JPEG
H.261/H.263
MPEG
H.264
2.5 图像噪音:
指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。
2.6 自动白平衡处理技术(auto White Balance):
简单来说就是:摄像机对白色物体的还原。相关概念:色温。
2.7 视角:
与人的眼睛成像是相成原理,简单说就是成像范围。
2.8 自动对焦:
自动对焦可以分成两大类:一类是基于镜头与被拍摄目标之间距离测量的测距自动对焦,另一类是基于对焦屏上成像清晰的聚焦检测自动对焦(清晰度算法)。
注:变焦就是把远处的物体拉近。对焦是让图像清晰。
2.9 自动曝光和Gamma:
就是光圈和快门的组合。光圈,快门速度,ISO。Gamma即人眼对亮度的响应曲线。
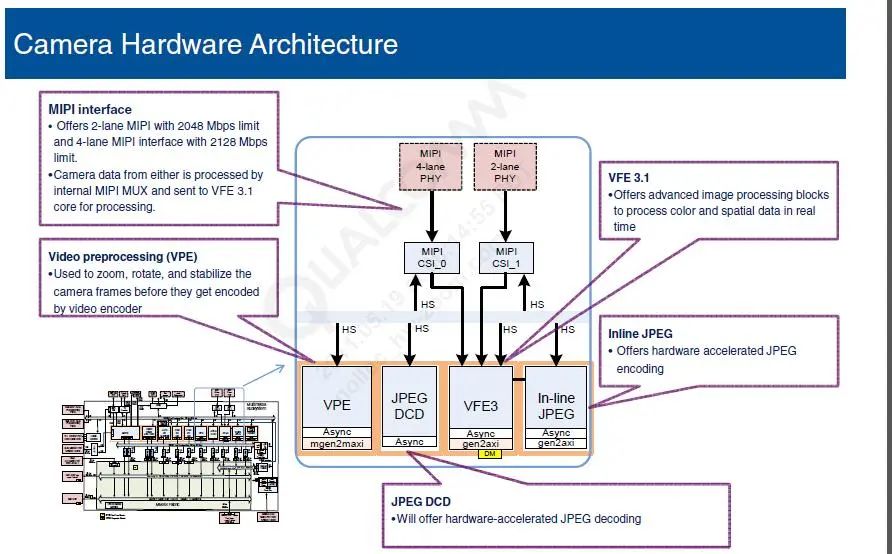
CAMERA部分硬件架构
VFE:VIDEO front-end 视频前端
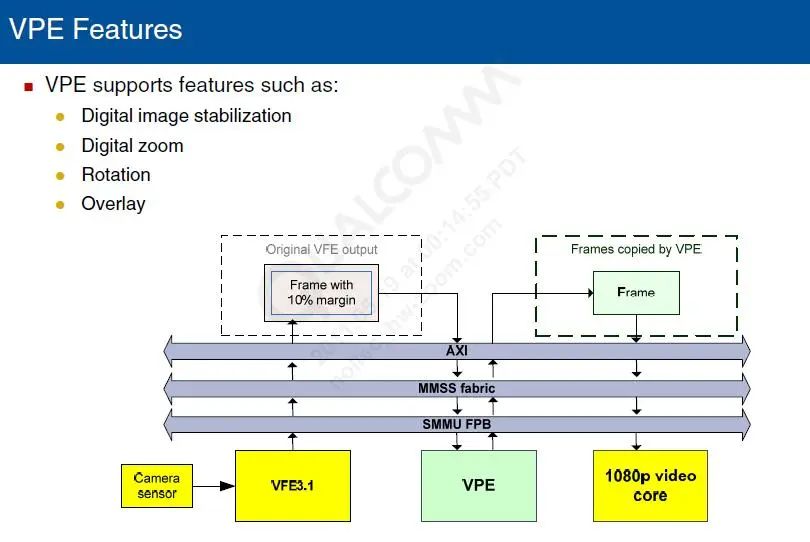
VPE:Video preprocessing 视频预处理
摄像头模组中自带了ISP(图像信号处理器),所以,VFE和VPE有关图像效果处理的功能都是关闭的。
1.VFE的功能:
1.1 通过算法提高图像的质量。
1.2 提供高分辨率的图像的AWB(自动白平衡)/AE(自动曝光)/AF(自动对焦)算法处理。
1.3 图像衰减校正。
1.4 低光下的噪声滤波。
1.5 图像色彩效果优化。
1.6 皮肤颜色效果优化。
1.7 图像抖动计算。
1.8 亮度适应算法。
2.VPE的功能:
2.1 图像稳定性。
2.2 数字对焦。
2.3 图像旋转。
2.4 Overlay。
三、android系统camera基本架构
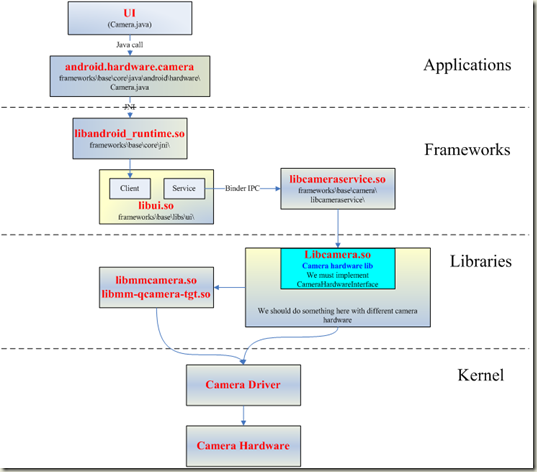
1.应用层
Camera 的应用层在Android 上表现为直接调用SDK API 开发的一个Camera 应用APK 包。代码在/android/packages/apps/Camera 下。主要对 android.hardware.Camera(在Framework中) 类的调用,并且实现Camera 应用的业务逻辑和UI 显示。一个Android 应用中若要使用这个android.hardware.Camera类,需要在Manifest 文件声明Camera 的权限,另外还 需要添加一些 元素来声明应用中的Camera 特性,如自动对焦等。 具体做法可如下:
2.Framework层
2.1 android.hardware.Camera:代码位置/android/frameworks/base/core/java/android/hardware/Camera.java
这部分目标是framework.jar。这是是Android 提供给app层调用的java接口。这个类用来连接或断开一个Camera 服务,设置拍摄参数,开始、停止预览,拍照等。
2.2 android.hardware.Camera这个类是和JNI中定义的类是一个,有些方法通过JNI的方式调用本地代码得到,有些方法自己实现。 Camera的JAVA native调用部分(JNI):/android/frameworks/base/core/jni/android_hardware_Camera.cpp。Camera.java 承接JAVA 代码到C++ 代码的桥梁。编译生成libandroid_runtime.so 。libandroid_runtime.so库是公用的, 其中除了Camera 还有其他方面的功能。
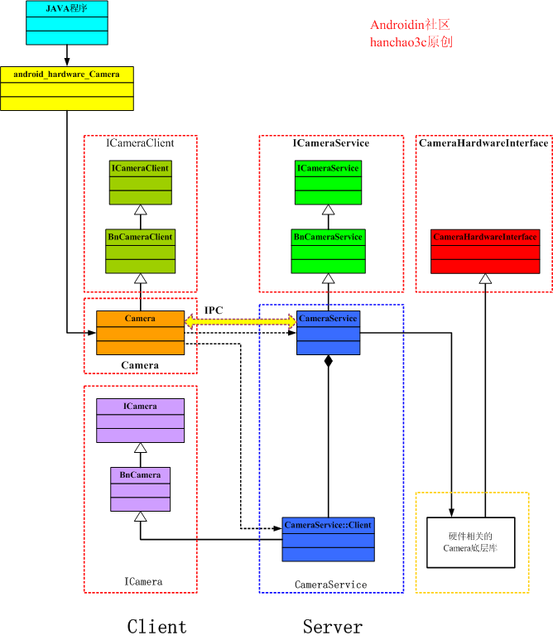
2.3 Camera框架的client部分:
代码位置:/android/frameworks/base/libs/camera/下5个文件。
Camera.cpp
ICamera.cpp
ICameraClient.cpp
ICameraService.cpp
它们的头文件在/android/frameworks/base/include/camera目录下。
这部分的内容编译生成libcamera_client.so 。在Camera 模块的各个库中,libcamera_client.so 位于核心的位置,作为Camera 框架的 Client 客户端部分,与另外一部分内容服务端 libcameraservice.so 通过进程间通讯(即Binder 机制)的方式进行通讯。
2.4 Camera框架的service部分:
代码位置:/android/frameworks/base/services/camera/libcameraservice。
这部分内容被编译成库libcameraservice.so 。CameraService 是Camera 服务,Camera 框架的中间层,用于链接CameraHardwareInterface 和Client部分 ,它通过调用实际的Camera 硬件接口来实现功能,即下层HAL层。
四. 摄像头预览、拍照、录像基本数据流向和处理流程以及驱动调试
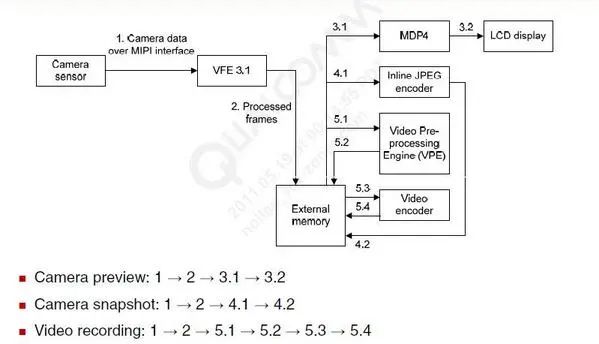
cpp主要分为三个部分,preview,snapshot,video。它们分别用一个pthread进行处理。另外还有auto focus功能也是用pthread的方式处理。预览或拍照、视频线程处理得到的数据帧都以datacallback的方式回调到上层CameraService.cpp中,进行存储或预览等操作。以下是HAL层部分的代码大概的调用结构流程。
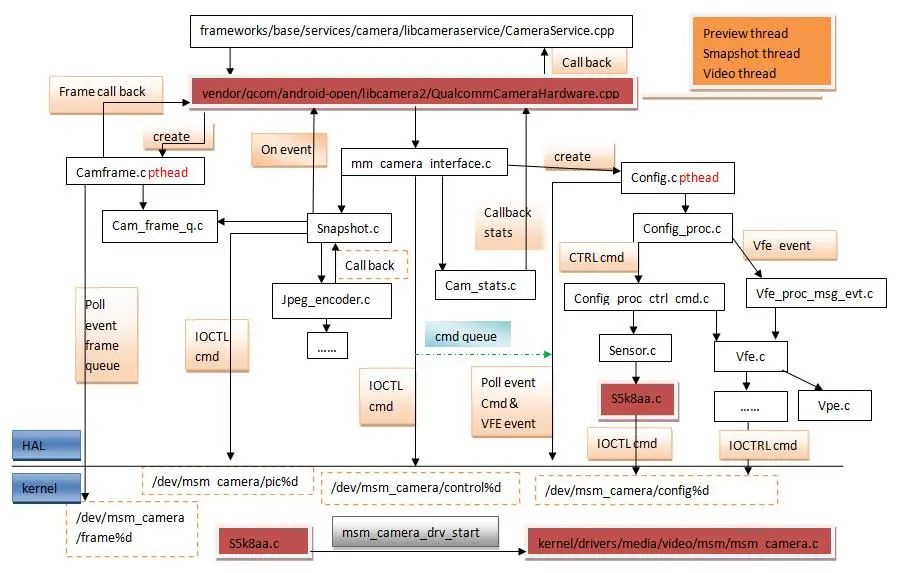
整个模块主要巡行三个主线程:control、config及frame。
control用来执行总的控制,是上层控制接口。
config主要进行一些配置,这个线程里面主要进行3A的工作,另外还有一些跟效果有关的设置;
frame线程主要用来做帧queue的循环获取处理。所有事件或状态的反馈,用回调函数的方式传回QualcommCameraHardware.cpp。
2. 驱动部分从设备驱动s5k8aa.c开始。新建平台设备后,执行入口函数probe时,调用创建摄像头设备功能函数
int msm_camera_drv_start(struct platform_device *dev,
int (*sensor_probe)(const struct msm_camera_sensor_info *,
struct msm_sensor_ctrl *))
并将设备信息结构体和摄像头设备调用入口sensor_probe传入。msm_camera_drv_start(xxx)函数在msm_camera.c中实现。他创建了提供上层调用的四个终于设备结点:
/dev/msm_camera/frame%d
/dev/msm_camera/control%d
/dev/msm_camera/config%d
/dev/msm_camera/pic%d
实现了上层库对VFE模块,VPE模块,jpeg_encoder模块和摄像头sensor模块驱动的控制调用接口。在file_operations中的相应函数中分别实现的是这些设备的新建初始化和IOCTL功能调用接口。
然后这个函数还创建了四个工作队列:
struct msm_device_queue event_q;
struct msm_device_queue frame_q;
struct msm_device_queue pict_q;
struct msm_device_queue vpe_q;
event_q包括/dev/msm_camera/control%d传入的控制信号队列,用于将上层传下来的控制命令(command)传到config thread中去。
frame_q用于对图像帧的操作管理,预览或录像时帧将传递给DSP进行处理。
pict_q包含拍照帧,用于给jpeg_encoder进行图像编码处理。
vpe_q是VPE控制命令队列。
s5k8aa.c是相应摄像头设备的驱动部分。它的功能很简单,主要实现sensor模块的创建、初始化和控制。主要实现以下三个函数:
s->s_init = ov2685_sensor_init;
s->s_release = ov2685_sensor_release;
s->s_config = ov2685_sensor_config;
ov2685_sensor_init函数:
主要实现摄像头的上电、时钟控制(MCLK)、设备初始化功能。 上电分为DOVDD、DVDD、AVDD、reset、PWDN几个部分。需要按照设备要求顺序操作,一般时钟控制顺序也包含在内。 设备初始化过程是将sensor设备的所有寄存器全部初始化一遍,采用IIC方式将初始化寄存器地址和值全部发送到sensor端。完成后此时摄像头模组才能正常工作,并将图像通过MIPI线路传送到CPU端。
ov2685_sensor_config函数:
主要实现对sensor的各种配置接口,相应的有帧率配置,白平衡效果设置,曝光度设置,特效设置等等。相应接口将配置好的寄存器列表通过IIC发送到sensor中。
3. 摄像头调试中的几个问题点:
1.1 是否正确上电,是否有时钟波形输出。 检测输出电压的电压值是否和上电时序以及MCLK是否符合sensor的要求。这部分可以用示波器和万用表测量。测量电压值和上电时序以及MCLK的时钟频率是否正确。
1.2 IIC读写是否正常。调试CPU与ISP间的I2C通信。 检测包括IIC地址是否正确,协议是否匹配。这部分也可以用示波器测量IIC的SDA、CLK的峰值、波形逻辑是否正确。
1.3 正确上电并初始化以后sensor模块是否正常工作。 这部分主要通过用示波器测量MIPI线路的数据和时钟PIN是否正确,它的波形是否含有数据,是否标准波形,峰值有没有达到要求等。
1.4 如果以上都正确了以后,MIPI控制器将接收到中断,并开始处理图像信号。此时如果出错,可以通过中断信号的出错值查看错误状态。除CPU端是否正常初始化工作的问题外,需要关注模组端设置的图像格式和CPU接收的默认图像格式和图像大小(SIZE)是否一致。模组中图片格式和图像大小通过寄存器值查看。CPU端接收图片格式和图像大小在HAL部分的s5k8aa中设置, 拍照源图像大小和预览源图像大小需要分别设置。
以上部分完成后,摄像头可以正确预览。
编辑:黄飞











 工商网监
工商网监
评论