 电子发烧友App
电子发烧友App


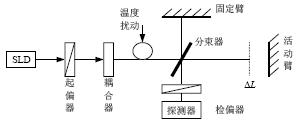
生物学家研究发现, 经过数亿年的进化, 多种昆虫都进化出了感知天空偏振光方位角并将其用于导航的奇异能力, 以帮助其完成觅食、归巢及迁徙等行为.
受到昆虫奇特偏振光导航能力的启发, 基于天空偏振光的天文导航技术已成为仿生导航技术领域的研究热点, 研究人员已开发出多种模仿生物偏振导航结构和机理的偏振导航传感器, 并且该类传感器正朝着微型化及集成化方向发展.
已取得的研究成果表明该导航手段具有完全自主、误差不随时间累积和实时性好等优点, 可为无人机、交通运输、科学研究及资源勘测等社会各领域提供一种行之有效的导航手段.
导航本领是动物及人类生存和发展的基本能力, 如动物觅食、归巢及长途迁徙等均依赖于其所具有的特定导航定位能力. 从烟雾信号、天体导航到指南针、航海精密计时器再到地基无线电导航及天基无线电导航, 导航定位技术的每次革新无不加速了人类的进步.
随着信息时代的到来, 导航定位技术越发凸显出其重要意义, 在军事、交通运输、水利水电、海洋渔业、气象测报、国土测绘、减灾救灾和公共安全等领域具有不可替代的作用, 牵引推动了电子、通信、机械制造、地理信息等相关产业和信息服务业的发展, 产生了显著的经济效益和社会效益.
目前应用较多的导航定位技术主要包括惯性导航、陆基及天基无线电(卫星)导航和天文导航. 惯性导航系统主要包括加速度计及陀螺仪, 其通过对测量得到的加速度进行积分, 得到被测载体的速度及位移. 无线电导航技术通过处理接收到的无线电信号的振幅、频率、时间和相位等信息, 得到载体与多个无线电基站(卫星)的相对速度及距离, 实现导航定位.
目前全球定位系统(global positioning system, GPS)、伽利略系统及我国的北斗系统等天基无线电导航系统的应用已十分广泛. 天文导航利用对自然天体的测量来确定自身位置和航向, 是一种完全自主的导航方式.
与惯性导航系统相比, 天文导航系统误差不随时间积累, 而与GPS等无线电导航技术相比又不易受到欺骗、干扰和破坏. 目前, 现代天文导航系统主要以星敏感器、紫外月球敏感器和红外地球敏感器作为探测部件, 通过星图搜索匹配技术实现导航定位. 生物学家研究发现, 多种昆虫经过35亿年的进化形成了精巧的复眼器官, 具备了利用复眼偏振识别结构感知天空偏振矢量场信息, 获得导航定位的能力, 为人类研究新型自主导航器件提供了很好的模仿对象.
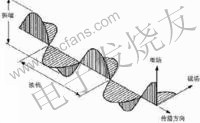
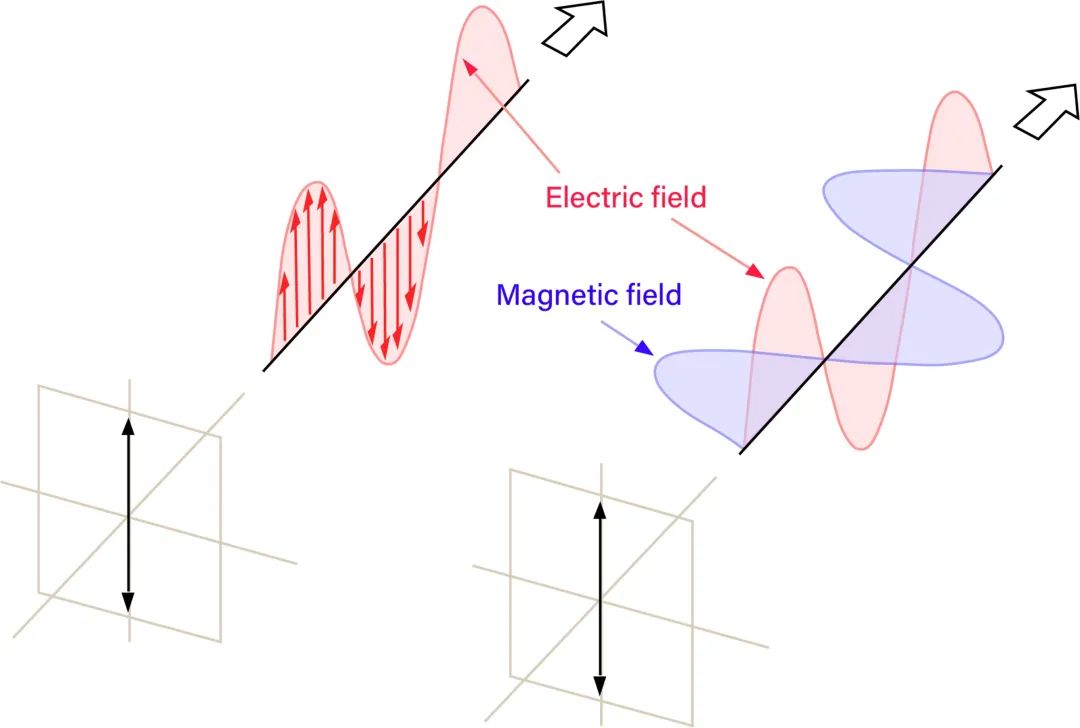
受到昆虫奇特偏振光导航能力的启发, 国内外多位学者通过模仿昆虫的偏振敏感结构及偏振导航机制, 对仿生偏振光导航机理、方法与手段进行了大量研究, 并开发出多种偏振导航传感器. 昆虫的天空偏振光导航生物机理太阳光经过大气照射地表的过程中发生散射, 散射光发生极化进而形成具有规律性分布的天空偏振矢量场.
该矢量场的分布模式主要包括偏振光方位角分布模式与偏振度分布模式. 学者大量研究表明, 晴朗天空下, 天空偏振光方位角分布模式基本符合Rayleigh散射理论; 在云、雾等气溶胶条件下 , 相较于晴朗天空, 由于多次散射的影响, 天空散射光的偏振度会大幅下降, 但偏振光方位角分布模式受天气条件影响较小, 基本保持稳定.
生物学家研究发现, 经过35亿年的进化, 多种昆虫、迁徙鸟类、某些两栖类、爬行类及哺乳类中的蝙蝠都进化出了感知天空偏振光方位角并将其用于导航的奇异能力, 以帮助其完成觅食、归巢及迁徙等行为.
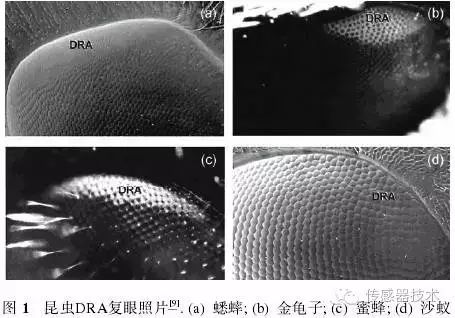
1949年, Frisch发现蜜蜂可利用天空紫外偏振光进行导航, 其后沙蚁、蟋蟀、蝗虫、蝴蝶甚至夜行性蜣螂等昆虫的偏振光导航能力也被陆续发现. 生物行为学及形态学实验研究显示, 具有偏振光导航能力的昆虫, 其复眼背部边缘区域(dorsal rim area, DRA)内一些排列规则的特殊小眼(图1)对偏振光非常敏感.
以蝗虫眼部DRA区域的小眼结构为例, 其结构如图2所示. 小 眼长度在350~450 um, 横截面积只有70 um2左右.
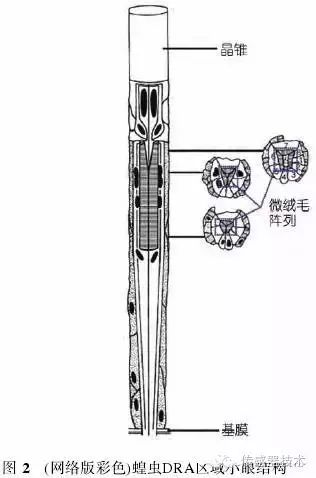
小眼由晶锥、感杆束、基膜等组成, 晶锥主要起屈光和保护作用. 感杆束中有数个小网膜细胞(或称为感杆细胞), 小网膜细胞由细胞膜向中腔伸出大量的微绒毛, 微绒毛的排列形式对光偏振处理有决定性作用.
基膜存在于小眼底部, 小眼的轴突通过基膜与神经节相联系, 进而对光信号进行处理. 通 过进一步的组织学及电生理学实验, 研究人员发现一般小眼神经感杆内微绒毛排列杂乱无章, 而DRA小眼神经感杆内微绒毛
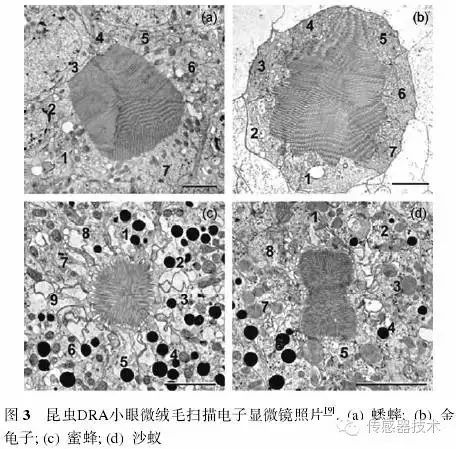
图3的空间排列具有轴向规则一致、径向相互垂直的特点, 该结构特点不仅使视神经细胞具有较高的偏振光敏感特性, 并且通过神经感杆的偏振光电矢量正交敏感结构与中枢神经层视神经叶部分的偏振对立神经元(polarization-opponent neurons, POL-neurons)的协同作用, 使昆虫的偏振视觉系统具有极低的光强依赖性, 即“弱光强化, 强光弱化“的特点.
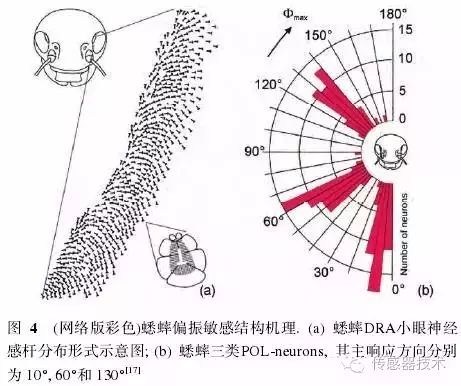
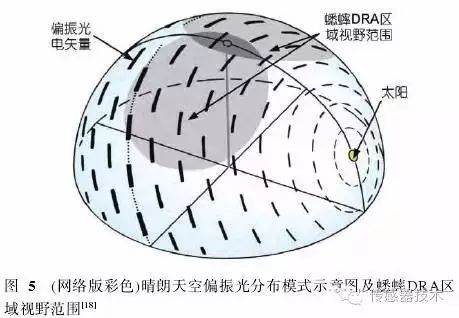
研究发现, 蟋蟀具有三类POL-neurons, 其主响应方向分别为10°, 60°和130°(图4), 蟋蟀通过对三类POL-neurons输出信号进行综合处理, 即可得出体轴与太阳子午线的夹角, 从而实现导航功能. 同时, DRA内众多偏振光敏感小眼的综合视野范围宽广(图5), 昆虫可对视野内的偏振信息进行整 合, 进而增强偏振视觉系统的鲁棒性及绝对灵敏 度, 降低视野内云、树叶等干扰因素的影响, 使其在多种天气、光照条件下都能较好地进行偏振光导航。
高集成度仿生复眼原理无人机导航
小型无人机上的微小人造复眼是利用昆虫的视觉系统原理制造而成,可以帮助小型无人机在飞行过程中即使受到周围环境嘈杂、狭窄、杂乱的干扰,也能够准确地避免碰撞,这也是具备实用性小型自主飞行系统的关键一步。
小型无人机的研究属于一个新兴方向,近年来已经在公共研究室和私人研究室中广泛涉及。这些微型无人机可以执行监视任务,也可以用于监控灾区或帮助人类运输货物。但目前来说,开发微型导航系统仍有很多工作要做,特别是对密闭空间。其中的避免碰撞仍然是微型无人机需要迎接的主要技术挑战,瑞士联邦理工学院的智能系统实验室主任Dario Floreano指出。
有些人试图利用数码相机、激光雷达等系统来解决这个问题,但这些系统过于笨重,耗能发热严重(堆资源,这是典型的地面思维。空中要做减法),而无人机需要的是一种小型、轻量级的设备,包括Floreano在内的若干具有空中思维意识的研究人员开始以昆虫的视角来寻找问题的答案。昆虫这个空中老师已进化了上亿年,它选择的技术路线不容置疑,昆虫复眼小,且空间分辨率较低,但是对光线的变化高度敏感(目标物的运动)使得它们在飞行过程中有效地避免了碰撞。
该研究团队最近利用这一原理开发出了一种新型复眼传感器,该传感器只有两毫克重,体积仅仅两立方毫米,可以检测出从光线很暗的室内到光线明亮的室外的运动状况,其检测速度是飞虫的3倍,Floreano说。
这种人造复眼是由镜头上的三个电子光电探测器排列成一种三角模式制备而成。通过结合单个的光电探测器进行测量,该设备可以感知物体的运动速度和方向。
处理信号的算法也已经被研究人员开发出来,该设备可以制备成小芯片,来计算物体之间的距离或者潜在碰撞发生的时间。该团队目前的工作重点之一是将该设备集成到小型天线平台(如实验室最近开发的可折叠四旋翼直升机)上。
Floreano说,现在面临的挑战是将多个人造复眼结合起来,迅速提高复眼集成度,安装在无人机上,使无人机可以“看到周围物体”,从而避免碰撞,在其飞行过程中,着陆和起飞时保持稳定。适合无人机的大规模集成复眼重量不能超过50克,不然会降低无人机的有效载荷。
编辑:黄飞

















 工商网监
工商网监
评论